Descargar para leer sin conexión

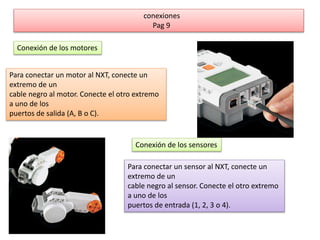
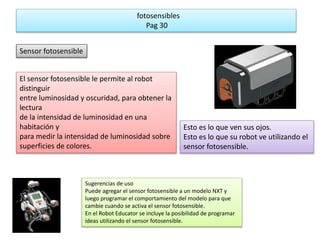
![sensor tactil
pag 26
Pruébeme
Utilice el programa adecuado en el submenú
Pruébeme (consulte la página 17) para ver
rápidamente cómo funciona.
Programa de NXT
También puede utilizar la función Programa
[Program] para crear programas directamente
en
el NXT sin utilizar un ordenador. Consulte la
sección
Programa en la páginas 15-16.](https://image.slidesharecdn.com/trabajominestoorm-141010112324-conversion-gate01/85/trabajo-vacaciones-13-320.jpg)
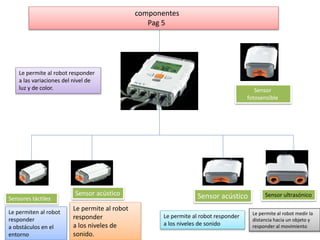
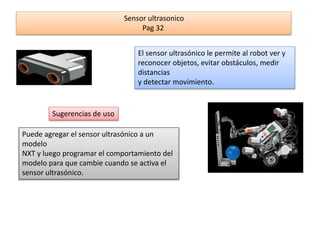
![acustico
Pag 28
Ver
Pruebe la capacidad del sensor acústico de medir el
volumen
acústico utilizando Ver [View]. Conecte el sensor acústico al
puerto 2 del NXT.
Haga sonidos en el micrófono (sensor acústico) y observe las lecturas
en el NXT. Pruebe también obtener la lectura de los sonidos a su
alrededor: ¿Qué tan fuertes son las voces más cercanas?](https://image.slidesharecdn.com/trabajominestoorm-141010112324-conversion-gate01/85/trabajo-vacaciones-15-320.jpg)
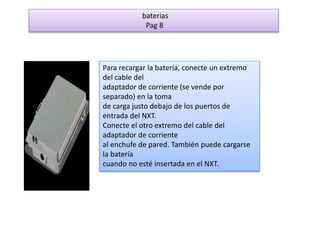
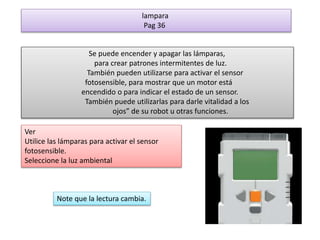
![Servomotor interactivo
pag 34
Los tres servomotores interactivos le
proporcionan
al robot la capacidad de moverse. El bloque
Desplazar [Move] automáticamente alinea sus
velocidades para que el robot se mueva
suavemente.
Sugerencias de uso
El sensor de rotación integrado en cada motor
junto con la
configuración de potencia de los bloques
Desplazar y Motor
en el software (consulte las páginas 56 a 58) le
permiten
programar diferentes velocidades para los
motores y mover
el robot con precisión.](https://image.slidesharecdn.com/trabajominestoorm-141010112324-conversion-gate01/85/trabajo-vacaciones-18-320.jpg)

El documento proporciona instrucciones para el uso del sistema LEGO MINDSTORMS Education, el cual permite a los estudiantes aprender ciencia, tecnología, ingeniería y matemáticas a través de la construcción y programación de robots. Incluye información sobre los componentes del sistema como sensores, motores y baterías, así como instrucciones para la construcción, programación y prueba de robots.
























































