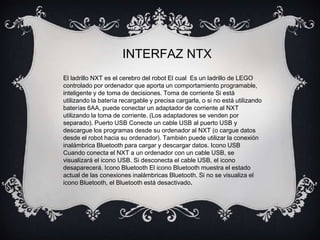
Este documento presenta el LEGO MINDSTORMS NXT, que permite a los estudiantes aprender ciencia, tecnología y matemáticas de forma divertida mediante la construcción y programación de robots con piezas LEGO. Explica cómo construir y programar robots usando el equipo LEGO MINDSTORMS NXT, e incluye detalles sobre sus componentes como motores, sensores y la interfaz del ladrillo NXT.




![SENSORES
Conecte los sensores o motores a los puertos del NXT. Ver [View] le ayudará
a seleccionar el puerto correcto o probar la configuración predeterminada.
Seleccione Ver [View] en la pantalla del NXT.
SENSOR DE SONIDO SENSOR DE CONTACTO SENSOR DE DISTANCIA](https://image.slidesharecdn.com/proyetoandrescruz-141105090911-conversion-gate02/85/Proyeto-andres-cruz-12-320.jpg)










































![Circular ..[1]](https://cdn.slidesharecdn.com/ss_thumbnails/circular-140410130149-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)








































