Método de ziegler
•Descargar como DOCX, PDF•
2 recomendaciones•3,415 vistas

zingler-nicols

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Método de ziegler
Similar a Método de ziegler (20)
Más de PAulo Borikua
Último
Último (19)
Método de ziegler
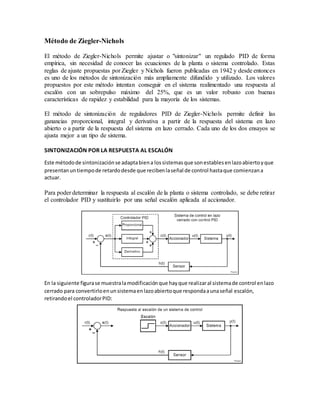
- 1. Método de Ziegler-Nichols El método de Ziegler-Nichols permite ajustar o "sintonizar" un regulado PID de forma empírica, sin necesidad de conocer las ecuaciones de la planta o sistema controlado. Estas reglas de ajuste propuestas por Ziegler y Nichols fueron publicadas en 1942 y desde entonces es uno de los métodos de sintonización más ampliamente difundido y utilizado. Los valores propuestos por este método intentan conseguir en el sistema realimentado una respuesta al escalón con un sobrepulso máximo del 25%, que es un valor robusto con buenas características de rapidez y estabilidad para la mayoría de los sistemas. El método de sintonización de reguladores PID de Ziegler-Nichols permite definir las ganancias proporcional, integral y derivativa a partir de la respuesta del sistema en lazo abierto o a partir de la respuesta del sistema en lazo cerrado. Cada uno de los dos ensayos se ajusta mejor a un tipo de sistema. SINTONIZACIÓN POR LA RESPUESTA AL ESCALÓN Este métodode sintonizaciónse adaptabiena lossistemasque sonestablesenlazoabiertoyque presentanuntiempode retardodesde que recibenlaseñal de control hastaque comienzana actuar. Para poder determinar la respuesta al escalón de la planta o sistema controlado, se debe retirar el controlador PID y sustituirlo por una señal escalón aplicada al accionador. En la siguiente figurase muestralamodificaciónque hayque realizaral sistemade control enlazo cerrado para convertirloenunsistemaenlazoabiertoque respondaaunaseñal escalón, retirandoel controladorPID:
- 2. En la imagensiguiente se puede verrepresentadoenrojola entrada escalónal accionador o señal c(t). En azul se representa la salida del sistema medida por el sensor o señal h(t). El escalón de entrada c(t) debe estar entre el 10% y el 20% del valor nominal de entrada. Como puede apreciarse, la respuesta del sistema presenta un retardo, también llamado tiempo muerto, representado por T1. Para calcularlosparámetrosse comienzaportrazar unalínearecta tangente alaseñal de salidadel sistema (curva azul). Esta tangente está dibujada en la imagen con una recta a trazos. El tiempoT1 corresponde al tiempomuerto. Este es el tiempoque tarda el sistemaencomenzara responder. Este intervalo se mide desde que la señal escalón sube, hasta el punto de corte de la recta tangente con el valor inicial del sistema, que en este caso es el valor 25ºC El tiempo T2 es el tiempo de subida. Este tiempo se calcula desde el punto en el que la recta tangente corta al valor inicial del sistema hasta el punto en el que la recta tangente llega al valor final del sistema. Además de estos dos tiempos característicos también hay que calcular la variación de la señal escalón dX y la variación de la respuesta del sistema dY.
- 3. En el caso de ejemploque aparece enlas imágenes,lavariaciónde la señal escalóncorresponde a dX = 5 voltiosde señal de control c(t) y la variacióndel sistemacorresponde adY = 200ºC medidos por el sensor h(t). A partirde estosvaloresse puede calcularlaconstante del sistemaKo: Ko = (dX * T2) / (dY* T1) Y a partirde laconstante Ko se puedencalcularlosparámetrosdel controladorPIDconacción solo proporcional (P),proporcional e integral (PI)oproporcional integral yderivativa(PID): Kp Ti Td P Ko PI 0.9*Ko 3.3*T1 PID 1.2*Ko 2*T1 0.5*T1 La constante Kp corresponde ala ganancia proporcional, Ti esla constante de tiempointegral y Td es la constante de tiempo derivativa. En el caso de tener el controlador PID configurado con las ganancias integrales Ki y derivativa Kd en vez de los tiempos Ti y Td, hay que tener en cuenta las siguientes relaciones entre ellos: Ki = Kp / Ti Kd = Kp * Td Con locual latabla de valoresparaajustar el controladorPIDserá lasiguiente: Kp Ki Kd P Ko PI 0.9*Ko 0.27*Ko/T1 PID 1.2*Ko 0.60*Ko/T1 0.60*Ko*T1
- 4. Ejemplo de sintonización de PID con la respuesta al escalón En el ejemplo que aparece en las imágenes anteriores se ha utilizado la simulación de un horno realizada con una hoja de cálculo: Control de temperatura Para calcular los parámetros del sistema se fuerza una respuesta al escalón fijando la señal de control en 0 voltios con un escalón de 5 voltios. El sistema responde cambiando desde 25 grados centígrados a 225 grados centígrados. Los tiempos son los que aparecen en las gráficas anteriores, con lo cual los valores de la curva de respuesta del sistema son los siguientes: dX = 5 - 0 = 5 voltios dY = 225 - 25 = 200 ºC T1 = 2.2 - 1 = 1.2 segundos T2 = 13.8 - 2.2 = 11.6 segundos A partir de estos valores se pueden calcular los parámetros del regulador PID: Ko = (dX * T2) / (dY * T1) = (5 * 11.6) / (200 * 1.2) = 0.242 V/ºC Kp Ki Kd P 0.242 PI 0.218 0.055 PID 0.290 0.121 0.174 Después de introducir los valores Kp, Ki y Kd en el PID se obtiene la siguiente respuesta: Ahorase puedenajustaramano losparámetrosdel PIDpara conseguirunarespuestaunpoco
- 5. más estable yrápida.Se ha aumentadolagananciaderivativayreducidolaintegral parareducir lasoscilaciones: Kp = 0.28 Ki = 0.10 Kd = 0.21 Comoresultado,el sistemase estabilizaahoraen12 segundos: En todos loscasos se ha limitadolarespuestaintegral de formaque valgacero si el error esmayor de 40ºC. Este modo de funcionamientode la ganancia integral es llamado anti-windup,sirve para evitar un sobrepico excesivo enla respuesta. Este sobrepico se produce porque el control integral aumentamientrasel accionadorse encuentrasaturado,de formaque acumulaunvalordemasiado alto y no ajustado a la respuesta real del sistema. SINTONIZACIÓN POR LA GANANCIA CRÍTICA EN LAZO CERRADO Este método no requiere retirar el controlador PID del lazo cerrado. En este caso sólo hay que reducir al mínimo la acción derivativa y la acción integral del regulador PID. El ensayo en lazo cerrado consiste en aumentar poco a poco la ganancia proporcional hasta que el sistema oscile de forma mantenida ante cualquier perturbación. Esta oscilación debe ser lineal, sin saturaciones. En este momento hay que medir la ganancia proporcional, llamada ganancia crítica o Kc, y el periodo de oscilación Tc en segundos.
- 6. Una vez hallados estos dos parámetros se pueden calcular los parámetros del controlador PID con acción solo proporcional (P), proporcional e integral (PI) o proporcional integral y derivativa (PID): Kp Ti Td P 0.50*Kc PI 0.45*Kc 0.83*Tc PID 0.59*Kc 0.50*Tc 0.125*Tc Si los valoresde tiempoTi yTd se traducena ganancias,se obtiene: Ki = Kp / Ti Kd = Kp * Td Kp Ki Kd P 0.50*Kc PI 0.45*Kc 0.54*Kc/Tc PID 0.59*Kc 1.18*Kc/Tc 0.074*Kc*Tc EJEMPLO DE SINTONIZACIÓN DE PID CON LA GANANCIA CRÍTICA Vamos a realizar una sintonización del sistema térmico simulado anteriormente: Control de temperatura La primera operación será la de anular las acciones derivativa e integral: Kd = 0 Ki = 0 Si el sistema PID utilizase tiempos, habría que hacer Td = 0 y Ti = infinito A continuación se fija una temperatura de trabajo en la referencia y se aumenta la ganancia proporcional hasta conseguir una respuesta oscilatoria mantenida. Con una ganancia proporcional Kp = 0.40 la respuesta todavía está amortiguada:
- 7. Al aumentar la ganancia proporcional hasta Kp = 0.43 se obtiene una respuesta con oscilaciones mantenidas: Al aumentar la ganancia hasta Kp = 0.45, las oscilaciones crecen en el tiempo. En este caso, por lo tanto, la ganancia crítica y el periodo son: Kc = 0.43 Tc = 21/4 = 5.3
- 8. A partirde este valorse calculanlosparámetrosdel controladorPID: Kp Ti Td P 0.215 PI 0.195 4.40 PID 0.254 2.65 0.663 Kp Ki Kd P 0.215 PI 0.195 0.044 PID 0.254 0.096 0.169 Como puede comprobarse, los valores son semejantes a los valores obtenidos anteriormente con el método de la respuesta al escalón. Introduciendo estos valores en la hoja de cálculo se obtiene la siguiente respuesta del sistema térmico con controlador PID: En este caso tambiénse puede terminarde afinarel reguladorPIDa manopara conseguiruna respuestaunpocomás rápiday estable.
- 9. ESCUELA SUPERIIOR POLITECNICA DE CHIMBORAZO FACULTAD DE MECANICA - MANTENIMIENTO Catedra Automatización y Control Docente Ing. Pablo Montalvo Tema: Método de ZIEGLER-NICHOLS Realizado por Flores Paul Código 828