Compensador PID para control de velocidad de motor CC
•
0 recomendaciones•44 vistas

DWQD

Recomendados
Más contenido relacionado
Similar a Compensador PID para control de velocidad de motor CC
Similar a Compensador PID para control de velocidad de motor CC (20)
Más de David Mora Cusicuna
Último
Último (20)
Compensador PID para control de velocidad de motor CC
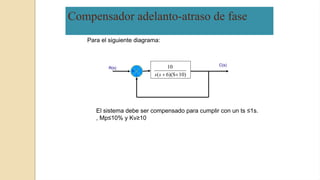
- 1. R(s) C(s) + - El sistema debe ser compensado para cumplir con un ts ≤1s. , Mp≤10% y Kv≥10 Compensador adelanto-atraso de fase Para el siguiente diagrama: 10 ( 6)(S 10) s s
- 2. 2 1 4 1 4; 0.1 0.59 =53.48 s n n P SOLUCION t e M
- 3. ( ) 6 10 180º ( ) 126.51 69.83 42.10 180º ( ) 58.41º Gc s s s s Gc s Gc s
- 4. Se ubica el cero del compensador (1/T) justo debajo de la ubicación deseada PD, así, el ángulo del cero (1/T) es de 90º. Calculamos el ángulo del polo de la relación: 1/T=-4 1/αT=-12.87 58.41
- 6. 4 3 2 10 4 D.L.R de: 60.76 ( 6)(S 10) 12.87 28.87 265.92 1322.96 2403.04 0 polos de lazo cerrado -17.5838 + 0.0000i -3.9737 + 5.31i -3.9737 - 5.31i -3.3389 + 0.0000i(Dominante) S Trazamos x s s S S S S S Los
- 7. Para corregir el diseño probamos una nueva ubicación del cero (1/T), vamos a proponer que esté en un sitio tal que αz=70º
- 8. A continuación se presenta el LGR del sistema con este nuevo compensador en adelanto, donde se puede observar la ubicación Deseado es el polo dominante
- 9. Ahora verificamos la condición de error calculando el Kv del sistema compensado: El cual es menor que 10, nos piden Kv≥10 hay que añadir un compensador en atraso, por lo cual se estaría diseñando una red adelanto-atraso. 10 2.06 4.84 Vrequerido Vsistema K K
- 11. 1.4 CONTROLADOR PID 2 2 1 1 0 4 2 3 1 2 2 1 1 2 2 4 1 1 2 2 3 1 2 1 1 2 2 1 1 2 2 . . 1 . . . 1 ( ) . ( ) . ( ) . . . . . . ( . . ) 1 ( ) (1 ) . ( . . ) ( . . ) 1 ( ) (1 ) c i c i c p d p d i R C S R C S V s R R G s V s R R R C S R C R C S R R C R C G s R R C R C R C S R C R C K G s K T S K K S T S S
- 12. Ejemplo Se tiene: Donde: Diseñar controlador PID,Se impone al sistema unas especificaciones de respuesta temporal transitoria de: ts = 1 segundo y Mp = 10%.
- 13. Para cumplir dichas especificaciones primero calculamos controlador PD: ρωn =4 y Para lograr que el punto -4±5.458×j pertenezca al LGR. se añade un control proporcional derivativo (PD), introduciendo el cero del control en una posición desde la cual sea capaz de atraer las ramas del LGR. hacia la izquierda, de manera que el punto -4±5.458× j pertenezca al LGR. F.T. del controlador PD será: Gc(s)=k×(1+Td×s)=kd(s+a)
- 14. Para fijar la posición del cero se impone la condición de ángulo Pto deseado 0
- 15. Calculamos el valor de la ganancia kd en dicho punto. Para ello se aplica la condición de módulo Se tiene: Gc(s)=kd(s+a)=0.0609(s+11.136) Gc(s)=kd(s+a)=0.6774(1+S/11.136)
- 16. CALCULO DEL CONTROLADOR PI PUNTO DESEADO SELECIONAMOS EL CERO EN S= -0.1 ANGULO =0.69° 53.76 54.45 ( 0.1) ( ) 1 ( 0.1) ( ) c p c Kp S G s S K S G s S
- 17. 1 1 2 2 4 1 1 2 2 3 1 2 1 1 2 2 1 1 2 2 4 1 1 2 2 1 1 2 2 3 1 2 1 1 2 2 1 1 11.136 . 0.1 ( ) 0.0609 1 ( ) 0.6842(1 0.089 ) 9.89 . . . ( . . ) 1 ( ) (1 ) . ( . . ) ( . . ) ( . . ) 0.6842 ;9.89 ( . . ) . . . 0.089 ( . c c c S S G s S G s S S R C R C S R R C R C G s R R C R C R C S R C R C R R C R C R C R C R R C R C R C R C 2 2 ; . ) R C
- 18. 1 2 1 2 9 1 2 1 2 4 1 3 1 2 3 4 C 10 989 K 8.8021 10 de las dos ecuaciones anteriores 890 y 99 890 0.6842 0.6842 0.6157 ( ) 989 Tomando R 1 R 0.6842 Tomando C uF R R R R X R K R K R R K R R R K K K
- 19. Diseño Controlador PID para regular Velocidad del Motor de CC Un actuador mecánico muy difundido es el motor de CC. Provee directamente movimiento rotacional y, adecuadamente acondicionado, movimiento traslacional. El circuito eléctrico de armadura y el diagrama mecánico rotacional, se muestran en la figura:
- 20. Requerimientos de Diseño El motor sin controlador puede rotar solamente a 0,1rad/s con una entrada de 1 Volt(ver simulación de la planta ). Uno de los requerimientos es que en estado estacionario presente un error respecto de la velocidad deseada menor que el 1%. Dinámicamente se espera un tiempo de establecimiento de 2 seg y un sobrepaso menor que el 5% para evitar daños en la máquina. Es decir : Los requerimientos de diseño: · tiempo de establecimiento de 2 seg · sobrepaso menor que el 5% · Error de estado estacionario 1%
- 21. Para el ejemplo se consideran los siguientes parámetros: * momento de inercia del sistema (J) = 0.01 kg.m^2/s^2 * coeficiente de friccion (B) = 0.1 Nms * constante de fuerza electromotriz (K=Km=Kb) = 0.01 Nm/Amp * resistencia de armadura (R) = 1 ohm * inductancia de armadura (L) = 0.5 H * entrada (V): Fuente de Tensión * posición del eje: θ * Se supone rotor y eje rígido
- 22. el esquema del sistema se ve: Incluyendo controlador Utilizaremos MATLAB para determinar parámetros de controlador PID para cumplir con las especificaciones
- 23. la función transferencia a lazo abierto del Motor de CC 2 2 2 ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) m a m b m b a a k s V s Js b Ls R k k k k W s k V s Js b Ls R k W s k V s JLs RJ bL s bR k
- 24. J=0.01; b=0.1; K=0.01; R=1; L=0.5; num=K; den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)]; step(num,den,0:0.1:3);grid Title('Respuesta al escalón') Programa para hallar respuesta al escalon del sistema original
- 26. De la figura se observa que se obtiene una salida 10 veces más chica que la deseada (0,1 rad/s) y 3 seg de establecimiento, sin cumplir las especificaciones
- 27. Control Proporcional Probemos primero un control Proporcional con ganancia 100 . Para ello hay que agregar los siguientes comandos al final del archivo anterior
- 28. J=0.01; b=0.1; K=0.01; R=1; L=0.5; num=K; den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)]; Kp=100; numa=Kp*num; dena=den; [numac,denac]=cloop(numa,dena); t=0:0.01:5; step(numac,denac,t);grid title( 'Respuesta al escalón con Control Proporcional')
- 30. De la figura de arriba vemos que tanto el error de estado estacionario y el sobrepico son muy grandes
- 31. Recordemos del PID que incorporando un término integral se eliminará el error de estado estacionario y un término derivativo reducirá el sobrepico. un controlador PID con Ki y Kd pequeños. Recordemos que la función de transferencia para un controlador PID es:
- 32. J=0.01; b=0.1;K=0.01;R=1;L=0.5; num=K; den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)]; Kp=100; Ki=1; Kd=1; numc=[Kd Kp Ki]; denc=[0 1 0]; numa=conv(num,numc); dena=conv(den,denc); [numac,denac]=cloop(numa,dena); step(numac,denac);grid title('Control PID con pequeño Ki and Kd')
- 34. Sigue teniendo error en estado estacionario y sobreimpulso
- 35. J=0.01; b=0.1;K=0.01;R=1;L=0.5; num=K; den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)]; Kp=100; Ki=200; Kd=1; numc=[Kd Kp Ki]; denc=[0 1 0]; numa=conv(num,numc); dena=conv(den,denc); [numac,denac]=cloop(numa,dena); step(numac,denac);grid title('Control PID con pequeño Kd y grande Ki')
- 36. Ahora vemos que la respuesta es mucho más rápida que antes, pero el Ki grande ha empeorado la respuesta transitoria (gran sobrepico). Incrementemos Kd para reducir el sobrepico. Vuelva al archivo-m y cambie Kd a 10
- 37. J=0.01; b=0.1;K=0.01;R=1;L=0.5; num=K; den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)]; Kp=100; Ki=200; Kd=10; numc=[Kd Kp Ki]; denc=[0 1 0]; numa=conv(num,numc); dena=conv(den,denc); [numac,denac]=cloop(numa,dena); step(numac,denac);grid title('Control PID con pequeño Kd=10 y grande Ki')
- 39. Entonces sabemos que si usamos un controlador PID con Kp=100, Ki=200, Kd=10, todos nuestros requerimientos de diseño serán satisfechos.
- 40. · tiempo de establecimiento de 2 seg · sobrepaso menor que el 5% · Error de estado estacionario 1%