Clase 3 - Esquemas de Control
•
13 recomendaciones•10,124 vistas

Descripción de los esquemas más utilizados en la Teoría de Control Automático

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (17)
Similar a Clase 3 - Esquemas de Control
Similar a Clase 3 - Esquemas de Control (20)
Más de UNEFA
Más de UNEFA (20)
Clase 3 - Esquemas de Control
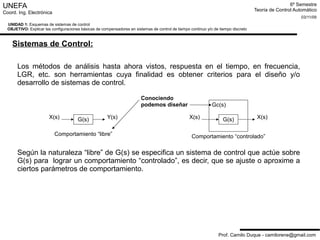
- 1. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Los métodos de análisis hasta ahora vistos, respuesta en el tiempo, en frecuencia, LGR, etc. son herramientas cuya finalidad es obtener criterios para el diseño y/o desarrollo de sistemas de control. Conociendo podemos diseñar Gc(s) X(s) G(s) Y(s) X(s) G(s) X(s) Comportamiento “libre” Comportamiento “controlado” Según la naturaleza “libre” de G(s) se especifica un sistema de control que actúe sobre G(s) para lograr un comportamiento “controlado”, es decir, que se ajuste o aproxime a ciertos parámetros de comportamiento. Prof. Camilo Duque - camilorene@gmail.com
- 2. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Definición de Sistema de Control. Es un conjunto de componentes que buscan obtener ciertas características de desempeño sobre un sistema particular. Aunque este concepto es muy amplio lo restringiremos a el caso de una solo variable de interés. Los componentes básicos de un sistema de control son: Señal de entrada o comando. Controlador o algoritmo de control Actuador o elemento final de control Señal de salida o resultado Los objetivos típicos de un sistema de control son: Estabilizar el comportamiento sistema (Estabilización) Regular el sistema cerca de un punto deseado de operación (Regulación) Seguir una determinada señal de comando (Tracking o seguimiento) Reducir la respuesta a perturbaciones (Rechazo a perturbaciones) Prof. Camilo Duque - camilorene@gmail.com
- 3. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Términos usados en sistemas de control. Planta. Cualquier objeto o sistema físico que se pueda controlar. Proceso. Cualquier operación que se pueda controlar. Variable controlada. La variable que se debe mantener en un valor deseado o dentro de un rango aproximado a este. Variable manipulada. La variable que el controlador modifica para afectar y mantener la variable controlada en el punto de operación deseado. Variable medida. La variable que se mide directamente para tener información directa o indirecta sobre el valor actual de la variable controlada. Punto de Consigna. (Set point o señal de referencia) es la señal de entrada que especifica al sistema de control el valor deseado de la variable controlada. Error. La diferencia entre el punto de consigna y la variable controlada. Prof. Camilo Duque - camilorene@gmail.com
- 4. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Controlador. Elemento del sistema de controla que según un conjunto de reglas (algoritmo de control) ejecuta acciones sobre el actuador para lograr el controla de la variable controlada.. Actuador. El componente que recibe la señal de control del controlador y produce la variación deseada en la variable manipulada, comúnmente se le llama elemento final de control. Perturbación. Cualquier señal de entrada que ocasione la desviación de la variable controlada del punto de Tanque de agitación consigna. y calentamiento Prof. Camilo Duque - camilorene@gmail.com
- 5. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Sistemas de Control en lazo abierto. Sus elementos son el controlador, el actuador y la planta. Se aplica una señal de entrada (set point) al controlador y este genera la señal de control al actuador quien modifica la variable manipulada para llevar la variable controlada a un comportamiento deseado. Estos sistemas son muy simples y económicos pero muy inexactos por lo que no se pueden aplicar en situaciones críticas. Control de posición de un brazo robot El controlador nunca sabe si el actuador hizo lo que se supone que tenía que hacer!!! Prof. Camilo Duque - camilorene@gmail.com
- 6. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Sistemas de Control en lazo cerrado. A los elementos del lazo abierto se agrega un comparador que calcula el error existente entre el set point y la variable controlada, el error es la entrada del controlador y el resto continua como el caso anterior. El hecho de medir la variable controlada y comparar con el set point se llama retroalimentación. Control de posición de un brazo robot El controlador siempre trata de minimizar el error (“donde estas y donde quiero que estés”) Prof. Camilo Duque - camilorene@gmail.com
- 7. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Efectos de la retroalimentación. La retroalimentación afecta ciertos parámetros de desempeño del sistema a controlar y siempre se buscará incrementar los efectos positivos y reducir los negativos. La ganancia total del sistema compensado: aun si en la vía de retroalimentación no hay una ganancia o atenuación, la ganancia del sistema controlado (sistema de control + planta) puede incrementarse o disminuirse, aunque por ahora tomaremos el caso en que aumenta, más adelante se verá que también la puede disminuir. El los sistemas de control que estudiaremos no habrá ganancia en el camino de retroalimentación. La estabilidad de la planta: si un sistema no puede mantenerse por si mismo dentro de unos límites de operación razonables y a medida que el tiempo pasa su comportamiento no converge se considera inestable. La retroalimentación puede mejorar o empobrecer la estabilidad de un sistema si no se aplica cuidadosamente. El rechazo a perturbaciones: en la mayoría de los casos la retroalimentación mejora el desempeño de la planta frente a perturbaciones y ruido. Prof. Camilo Duque - camilorene@gmail.com
- 8. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Hasta ahora sólo hemos estudiado técnicas que nos permiten evaluar el comportamiento “libre” de G(s) y presumir como puede ser el comportamiento “controlado” que se obtiene al aplicar sobre G(s) un sistema de control (solo se ha analizado aun lazo cerrado y con elemento de ganancia). A partir de ahora veremos una variedad de sistemas de control posibles. Salida del Controlador X(s) Gc(s) G(s) Y(s) Set Point Variable Variable CONTROLADOR Manipulada PLANTA Controlada DB de un sistema de control de lazo abierto. Salida del Error Controlador X(s) Σ Gc(s) G(s) Y(s) Set Point + CONTROLADOR Variable Variable Manipulada PLANTA Controlada - H(s) Variable RETROALIMENTACION Medida DB de un sistema de control de lazo cerrado. Prof. Camilo Duque - camilorene@gmail.com
- 9. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Sistema de control de posición de una antena Salida del Error Controlador X(s) Σ Gc(s) G(s) Y(s) Set Point + CONTROLADOR Variable Variable Manipulada PLANTA Controlada - H(s) Variable RETROALIMENTACION Medida Prof. Camilo Duque - camilorene@gmail.com
- 10. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Sistema de control de velocidad Salida del Error Controlador X(s) Σ Gc(s) G(s) Y(s) Set Point + CONTROLADOR Variable Variable Manipulada PLANTA Controlada - H(s) Variable RETROALIMENTACION Medida Prof. Camilo Duque - camilorene@gmail.com
- 11. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Sistemas de Control: Sistema de control de Temperatura de un tanque Salida del Error Controlador X(s) Σ Gc(s) G(s) Y(s) Set Point + CONTROLADOR Variable Variable Manipulada PLANTA Controlada - H(s) Variable RETROALIMENTACION Medida Prof. Camilo Duque - camilorene@gmail.com
- 12. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Esquemas de Control: Como ya sabemos la dinámica de un sistema lineal podemos representarla por su diagrama en bloques respectivo y sus FT. Cuando se habla de un sistema de control esto involucra varios elementos (cuáles? Depende de la configuración), pero el más importante es el que llamamos controlador o compensador cuya razón de ser es la de modificar el comportamiento “libre” del sistema y obligarlo a que siga un comportamiento “controlado” específico. La palabra compensador indica que su acción sobre el sistema es tal que “compensa las fallas que tiene este para alcanzar el comportamiento deseado”. Prof. Camilo Duque - camilorene@gmail.com
- 13. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Esquemas de Control: Las características y parámetros del controlador son el objetivo último del diseño, pero para poder realizar su ajuste es necesario determinar la forma en que el controlador estará conectado al sistema, esto es lo que llamamos configuración del sistema de control. La elección de la configuración del sistema de control debe hacerse de tal forma que el rendimiento sea el máximo y esto es por que para un mismo problema hay varias configuraciones posibles pero sólo una es mejor que las otras. Prof. Camilo Duque - camilorene@gmail.com
- 14. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Esquemas de Control: Compensación en Serie o Cascada. Es la más utilizada y es tal que el controlador se coloca en serie al sistema a controlar. Modelo3_1 Prof. Camilo Duque - camilorene@gmail.com
- 15. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Esquemas de Control: Compensación mediante realimentación. Hay dos lazos cerrados de realimentación, el lazo externo es el que se ha analizado hasta ahora y el interno es donde se ubica el controlador. Modelo3_2 Prof. Camilo Duque - camilorene@gmail.com
- 16. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Esquemas de Control: Compensación en Serie y realimentada. Resulta de la aplicación simultánea de las dos anteriores configuraciones. Modelo3_3 Prof. Camilo Duque - camilorene@gmail.com
- 17. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Esquemas de Control: Compensación Directa con Cascada. El primer controlador tiene como finalidad ajustar el valor deseado al resto del sistema. Modelo3_4 Prof. Camilo Duque - camilorene@gmail.com
- 18. UNEFA 6º Semestre Teoría de Control Automático Coord. Ing. Electrónica 03/11/09 UNIDAD 1: Esquemas de sistemas de control OBJETIVO: Explicar las configuraciones básicas de compensadores en sistemas de control de tiempo continuo y/o de tiempo discreto Esquemas de Control: Compensación Prealimentada. El controlador prealimentado se usa para modificar la FT resultante del sistema en lazo cerrado. Modelo3_5 Prof. Camilo Duque - camilorene@gmail.com