Utilizando el-criterio-de-routh
•Descargar como DOCX, PDF•
0 recomendaciones•1,203 vistas

Este documento describe cómo determinar el rango de valores de K para los cuales un sistema es estable utilizando el criterio de Routh-Hurwitz. Se obtienen los coeficientes del polinomio característico y aplicando Routh-Hurwitz se determina que K debe ser mayor que 7,5 para que el sistema sea estable. También se analiza la respuesta en lazo cerrado de un sistema y se calculan sus parámetros de respuesta transitoria.

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Utilizando el-criterio-de-routh
Similar a Utilizando el-criterio-de-routh (20)
Último
Utilizando el-criterio-de-routh
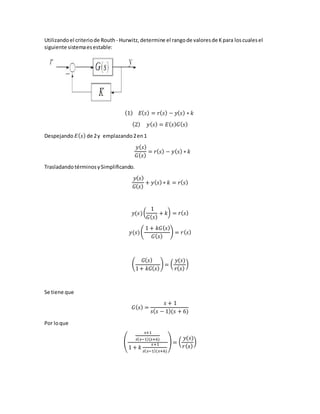
- 1. Utilizandoel criteriode Routh - Hurwitz,determine el rangode valoresde Kpara loscualesel siguiente sistemaesestable: (1) 𝐸( 𝑠) = 𝑟( 𝑠) − 𝑦( 𝑠) ∗ 𝑘 (2) 𝑦( 𝑠) = 𝐸( 𝑠) 𝐺( 𝑠) Despejando 𝐸( 𝑠) de 2y emplazando2en1 𝑦( 𝑠) 𝐺( 𝑠) = 𝑟( 𝑠) − 𝑦( 𝑠) ∗ 𝑘 Trasladando términosySimplificando. 𝑦( 𝑠) 𝐺( 𝑠) + 𝑦( 𝑠) ∗ 𝑘 = 𝑟( 𝑠) 𝑦(𝑠)( 1 𝐺( 𝑠) + 𝑘) = 𝑟( 𝑠) 𝑦(𝑠)( 1 + 𝑘𝐺( 𝑠) 𝐺( 𝑠) ) = 𝑟( 𝑠) ( 𝐺( 𝑠) 1+ 𝑘𝐺( 𝑠) ) = ( 𝑦(𝑠) 𝑟( 𝑠) ) Se tiene que 𝐺( 𝑠) = 𝑠 + 1 𝑠( 𝑠 − 1)(𝑠 + 6) Por loque ( 𝑠+1 𝑠( 𝑠−1)(𝑠+6) 1 + 𝑘 𝑠+1 𝑠( 𝑠−1)(𝑠+6) ) = ( 𝑦(𝑠) 𝑟( 𝑠) )
- 2. Simplificando ( 𝑠 + 1 𝑠( 𝑠 − 1)(𝑠 + 6) + 𝑘( 𝑠 + 1) ) = ( 𝑦(𝑠) 𝑟( 𝑠) ) ( 𝑠 + 1 𝑠(𝑠2 + 6𝑠 − 𝑠 − 6) + 𝑘( 𝑠 + 1) ) = ( 𝑦(𝑠) 𝑟( 𝑠) ) ( 𝑠 + 1 (𝑠3 + 5𝑠2 − 6𝑠) + 𝑘( 𝑠 + 1) ) = ( 𝑦(𝑠) 𝑟( 𝑠) ) ( 𝑠 + 1 𝑠3 + 5𝑠2 − 6𝑠 + 𝑘 𝑠 + 𝑘 ) = ( 𝑦(𝑠) 𝑟( 𝑠) ) Se obtiene que 𝑎0 = 1 𝑎1 = 5 𝑎2 = ( 𝑘 − 6 ) 𝑎3 = 𝑘 Aplicandoel criteriode Routh – Hurwitz 𝑠3 𝑠2 𝑠1 𝑠0 | 𝑎0 𝑎2 𝑎1 𝑎3 𝑏1 𝑐1 | 𝑠3 𝑠2 𝑠1 𝑠0 | 1 ( 𝑘 − 6 ) 5 𝑘 𝑏1 𝑐1 | 𝑏1 = ( 𝑎2 ∗ 𝑎1 − 𝑎0 ∗ 𝑎3 𝑎1 ) 𝑏1 = ( ( 𝑘 − 6 ) ∗ 5 − 𝑘 5 ) 𝑏1 = ( 4𝑘 − 30 5 ) 𝑐1 = 𝑘 Para que el sistemaseaestable 𝑏1 como 𝑐1 =0 4𝑘 − 30 > 0 𝑘 > 0
- 3. Por loque 𝑘 > 30 4 = 7,5 2. Se tiene el siguiente sistema en lazo cerrado 𝐺( 𝑠) = 𝑘 ( 𝑠 + 1)(𝑠 + 3) Sistemaenlazocerrado ( 𝐺( 𝑠) 1 + 𝐺( 𝑠) ) = ( 𝑐(𝑠) 𝑟( 𝑠) ) ( 𝑘 ( 𝑠+1)(𝑠+3) 1 + 𝑘 ( 𝑠+1)(𝑠+3) ) = ( 𝑐(𝑠) 𝑟( 𝑠) ) ( 𝑘 ( 𝑠 + 1)(𝑠 + 3) + 𝑘 ) = ( 𝑐(𝑠) 𝑟( 𝑠) ) ( 𝐺( 𝑠) 1+ 𝐺( 𝑠) ) = ( 𝐸(𝑠)𝐺( 𝑠) 𝑟( 𝑠) ) ( 1 1 + 𝐺( 𝑠) ) = ( 𝐸(𝑠) 𝑟( 𝑠) )
- 4. ( 𝑟( 𝑠) 1 + 𝐺( 𝑠) ) = 𝐸(𝑠) El error en estado estacionario es 𝑒𝑠𝑠 = lim 𝑡→∞ 𝑒(𝑡) = lim 𝑠→0 𝑠𝐸(𝑠) 𝑒𝑠𝑠 = lim 𝑠→0 𝑠𝐸(𝑠) = lim 𝑠→0 𝑠 ( 𝑟( 𝑠) 1 + 𝐺( 𝑠) ) 𝑟( 𝑠) = 8 𝑆 𝑠 ( 𝑟( 𝑠) 1 + 𝐺( 𝑠) ) = 𝑠 ( 8 𝑆 1+ 𝐺( 𝑠) ) = 𝑠 ( 8 𝑆 1+ 𝑘 ( 𝑠+1)(𝑠+3) ) ( 8 ( 𝑠+1)( 𝑠+3)+ 𝑘 ( 𝑠+1)(𝑠+3) ) = ( 8( 𝑠 + 1)(𝑠 + 3) ( 𝑠 + 1)( 𝑠 + 3) + 𝑘 ) = ( 8( 𝑠 + 1)(𝑠 + 3) ( 𝑠 + 1)( 𝑠 + 3) + 𝑘 ) ( 8(𝑆2 + 4𝑆 + 3) ( 𝑆2 + 4𝑆 + 3) + 𝑘 ) 𝑒𝑠𝑠 = lim 𝑠→0 ( 8(𝑆2 +4𝑆 + 3) ( 𝑆2 +4𝑆 + 3) + 𝑘 ) 𝑒𝑠𝑠 = ( 8(02 + 4 ∗ 0 + 3) (02 + 4 ∗ 0 + 3) + 𝑘 ) 𝑒𝑠𝑠 = ( 8(3) (3) + 𝑘 ) = ( 24 3 + 𝑘 ) Se pide que el errorsea igual al 5% 0,05 ∗ 8 = ( 24 3 + 𝑘 ) 3 + 𝑘 = ( 24 0,4 ) 𝑘 = 57
- 5. Ganancia enlazocerrado ( 𝑐(𝑠) 𝑟( 𝑠) ) = ( 57 ( 𝑠 + 1)(𝑠 + 3) + 57 ) = 57 𝑠2 + 4𝑠 + 60 Ganancia entiempoinfinito 57 60 = 0,95 Teniendoencuentaque Los sistemas de 2º orden tienen una función de transferencia de la forma: 𝐾𝑤 𝑛 𝑠2 + 2𝜉𝑤𝑠 + 𝑤2 Resolviendo 𝑤2 = 60 Frecuencianatural noamortiguada 𝑤 = 7,74 Coeficiente de amortiguamiento 2𝜉 ∗ 7,74 = 4 𝜉 = 0,258 Frecuenciaamortiguada 𝑤𝑑 = w√1− 𝜉2 = 7,48
- 6. Constante de amortiguamiento 𝜌 = 𝜉𝑤 = 2 Tiempo de establecimiento 𝑡 𝑠 ≈ 𝜋 𝜌 = 3,14159 2 = 1,57 Tiempopico 𝑡 𝑝 = 𝜋 w√1− 𝜉2 = 3,14159 7,48 = 0,419 Tiempode subida 𝑡 𝑟 ≈ 𝜋 − 𝜃 w√1 − 𝜉2 𝜃 = tan−1 w√1− 𝜉2 𝜌 𝜃 = tan−1 7,48 2 = tan−1 3,74 = 1,31 𝑡 𝑟 ≈ 3,14 − 1,31 7,48 = 0,224
- 7. Sobre impulso 𝑀 𝑃 = 𝑒 − 𝜉𝜋 √1−𝜉2 = 𝑒 − 0,81 √0,9334 = 𝑒 − 0,81 0,9661 = 𝑒−0,867 = 0,42 3. Para los siguientes sistemas, encontrar los parámetros de la respuesta transitoria ante entrada escalón unitario. Recordar que para un sistema de primer orden los parámetros son la ganancia estática, constante de tiempo, tiempo de subida y tiempo de asentamiento; para sistemas de segundo orden los parámetros son coeficiente de amortiguamiento, frecuencia natural no amortiguada, ganancia, frecuencia natural amortiguada, factor de atenuación, sobreimpulso, tiempo pico, tiempo de subida, tiempo de establecimiento y valor final 𝐺( 𝑆) = 4 𝑠 + 4 Un sistema de 1er orden tiene una función de transferencia de la forma 𝐺( 𝑆) = 4 𝑠 + 4 𝐺( 𝑆) = 𝑘 1 + 𝑇𝑠 Transformando 𝐺( 𝑆) = 1 1 + 1 4 𝑠 𝑘 = 1 𝑇 = 1 4 La respuesta de este sistema ante una entrada escalón unitario tiene por expresión 𝑦( 𝑠) = 𝑘(1 − 𝑒 𝑡 𝑇) 𝑦(0) = 1
- 8. Los parámetros característicos que aparecen representados en la figura anterior son: - K=1: La ganancia estática se define como el valor final ante entrada escalón unitario. - T=1/4: Constante de tiempo (es el tiempo en el que se alcanza el 63% del valor final). - ts= 3T=3/4: Tiempo de establecimiento (es el tiempo que tarda la respuesta en entrar y permanecer en la zona del 5% en torno a su valor de equilibrio). 𝐺(𝑆) = 12 𝑠2 + 2𝑠 + 4 Teniendoencuentaque Los sistemas de 2º orden tienen una función de transferencia de la forma: 𝐾𝑤 𝑛 𝑠2 + 2𝜉𝑤𝑠 + 𝑤2 Resolviendo 𝑤2 = 4
- 9. Frecuencianatural noamortiguada 𝑤 = 2 Coeficiente de amortiguamiento 2𝜉 ∗ 2 = 2 𝜉 = 0,5 Frecuenciaamortiguada 𝑤𝑑 = w√1− 𝜉2 = 1,7 Constante de amortiguamiento 𝜌 = 𝜉𝑤 = 1 Tiempo de establecimiento 𝑡 𝑠 ≈ 𝜋 𝜌 = 3,14159 1 = 3,1415
- 10. Tiempopico 𝑡 𝑝 = 𝜋 w√1− 𝜉2 = 3,14159 1,7 = 1,8479 Tiempode subida 𝑡 𝑟 ≈ 𝜋 − 𝜃 w√1 − 𝜉2 𝜃 = tan−1 w√1− 𝜉2 𝜌 𝜃 = tan−1 1,7 1 = tan−1 1,7 = 1,03 𝑡 𝑟 ≈ 3,14 − 1,03 1,7 = 1,24 Sobre impulso 𝑀 𝑃 = 𝑒 − 𝜉𝜋 √1−𝜉2 = 𝑒 − 1,57 √0,75 = 𝑒 − 1,57 0,86 = 𝑒−1,82 = 0,162 ANEXO 2 Diseñar un compensador en adelanto para que los polos dominantes en lazo cerrado sean 𝑃𝐷 = −2 ± 𝑗2√3 Ganancia sincompensar 𝐺( 𝑆) = 5 𝑆 1 + 5 (𝑆0,5+1) = 5(𝑆0,5 + 1) 𝑆(𝑆0,5 + 1) + 5𝑆 = 𝑆2,5 + 5 0,5𝑆2 + 6𝑆
- 11. 𝐺(𝑃𝐷) = (−2 + 𝑗2√3)2,5 + 5 0,5(−2 + 𝑗2√3)2 + 6(−2 + 𝑗2√3) 𝐺( 𝑃𝐷) = 𝑗5√3 −4 − 𝑗4√3 − 12 + 𝑗12√3 = 𝑗5√3 −16 + 𝑗8√3 = 5√3 16𝑗 + 8√3 = 5√3𝑎𝑛𝑔(0) 21,1𝑎𝑛𝑔(49) = 0,41𝑎𝑛𝑔(311) 𝜃 = 180 + 𝑝𝑜𝑙𝑜𝑠 − 𝑧𝑒𝑟𝑜𝑠 = 180 − 311 = −131 = 221 Es necesarioaplicardos compensadores De estose tiene que | 𝒌(𝒔 + 𝟎, 𝟑𝟕) 𝟐 (𝒔 + 𝟐𝟎, 𝟏𝟑) 𝟐 ∗ 𝑆2,5 + 5 0,5𝑆2 + 6𝑆 | ≤ 1 | 𝒌((−2 + 𝑗2√3) + 𝟎, 𝟑𝟕) 𝟐 ((−2 + 𝑗2√3) + 𝟐𝟎, 𝟏𝟑) 𝟐 ∗ (−2 + 𝑗2√3)2,5 + 5 0,5(−2 + 𝑗2√3)2 + 6(−2 + 𝑗2√3) | ≤ 1 | 𝒌(−1,63 + 𝑗2√3) 𝟐 (18,13 + 𝑗2√3) 𝟐 ∗ 5√3 16𝑗 + 8√3 | ≤ 1 | 𝒌(−𝟗, 𝟑𝟔− 𝒋6,5√3) (𝟑𝟐𝟐, 𝟖𝟗 + 𝒋72,52√3) ∗ 5√3 16𝑗 + 8√3 | ≤ 1 | 𝒌5√3 ∗ (−𝟗, 𝟑𝟔− 𝒋6,5√3) (𝟏𝟒𝟐𝟑,𝟏√3 + 𝒋6906,24) | ≤ 1
- 12. 𝒌978 𝟕𝟑𝟑𝟐 = 𝟏 𝒌 = 𝟕, 𝟓 Para el siguiente sistema: a) Analizar su respuesta en el tiempo ante entrada escalón (calcular los parámetros de la respuesta transitoria y error en estado estacionario ante entrada escalón unitario). Comprobar los resultados mediante simulación b) Diseñar un PID para que el sobreimpulso en lazo cerrado ante entrada escalón sea máximo del 15%, con un tiempo de establecimiento de 2 segundos máximo. Comprobar el diseño usando matlab-scilab Se escoge un tiempo de estabilización de dos segundos 𝑡𝑠 = 4 𝜌 𝜌 = 4 2 = 2 𝜑 = −𝜋 ln(𝑀𝑝) Donde escogemos 𝑀𝑝 = 5% 𝜑 = −𝜋 ln(0,05) = 1,04 = 59,50 𝜉 = 𝑐𝑜𝑠𝜑 = 0,507
- 13. Ganancia sincompensar 𝐺( 𝑆) = 1 𝑠2+5𝑠+4 1 + 1 𝑠2+5𝑠+4 = 1 𝑠2 + 5𝑠 + 5 𝐺( 𝑝𝑑) = 1 (−2 + 𝑗3,4)2 + 5(−2+ 𝑗3,4) + 5 𝐺( 𝑝𝑑) = 1 −12,56 + 3,4𝑗 = 1 23𝑎𝑛𝑔(164) = 0,0435𝑎𝑛𝑔(−164) = 0,0435𝑎𝑛𝑔(196) 𝜃 = 180 + 𝑝𝑜𝑙𝑜𝑠 − 𝑧𝑒𝑟𝑜𝑠 = 180 − 196 = −16 = 344 ANEXO 3 Una empresamultinacionalreconocidadedicada a la fabricación de reproductores DVD y Blu-Ray montóun puntode fábrica enColombia,cumpliendocon los estándares de calidad necesarios en la producción de dichos electrodomésticos. Sin embargo, desde hace un tiempo se han venido presentandoproblemas en el funcionamiento de los motores de corriente continua (DC) usados para implementar el mecanismo que hace girar los discos ópticos en los reproductores, ya que
- 14. girana velocidadesdiferentes a las establecidas por la empresa para el correcto funcionamiento de los reproductores o cambian constantemente de velocidad. Para corregir este problema, la empresa ha decidido incorporar módulos controladores en las tarjetas principales de los reproductores. Por tal razón, ha decidido contratar a un grupo de estudiantes de Ingeniería Electrónica de la Universidad Nacional Abierta y a Distancia para que diseñe un prototipo de controlador que permita mantener el motor DC girando a una velocidad constante para que la lectura del disco óptico sea óptima. Se debe garantizar igualmente un funcionamientoaceptable del controladorante perturbacionesque se puedan presentarporfallas eléctricas o señales parásitas en el sistema. Según especificaciones técnicas de los motores, su función de transferencia es: 𝐺(𝑆) = 10 𝑠2 + 6𝑠 + 4