Transformación de coordenadas y cónicas
•
0 recomendaciones•12 vistas

tranformacion de coordenadas/ triginometria

Recomendados
Más contenido relacionado
Similar a Transformación de coordenadas y cónicas
Similar a Transformación de coordenadas y cónicas (20)
Último
Último (20)
Transformación de coordenadas y cónicas
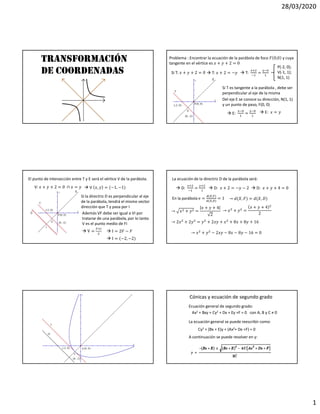
- 1. 28/03/2020 1 Transformación De coorDenaDas Problema : Encontrar la ecuación de la parábola de foco 𝐹 0,0 y cuya tangente en el vértice es 𝑥 + 𝑦 + 2 = 0 Si T: 𝑥 + 𝑦 + 2 = 0 T: 𝑥 + 2 = −𝑦 T: = P(-2, 0); V(-1, 1); N(1, 1) Si T es tangente a la parábola , debe ser perpendicular al eje de la misma Del eje E se conoce su dirección, N(1, 1) y un punto de paso, F(0, 0) E: = E: 𝑥 = 𝑦 El punto de intersección entre T y E será el vértice V de la parábola. V: 𝑥 + 𝑦 + 2 = 0 ∩ 𝑥 = 𝑦 V 𝑥, 𝑦 = (−1, −1) Si la directriz D es perpendicular al eje de la parábola, tendrá el mismo vector dirección que T y pasa por I Además VF debe ser igual a VI por tratarse de una parábola, por lo tanto V es el punto medio de FI V = I = 2𝑉 − 𝐹 I = (−2, −2) La ecuación de la directriz D de la parábola será: D: = D: 𝑥 + 2 = −𝑦 − 2 D: 𝑥 + 𝑦 + 4 = 0 En la parábola e = ( , ) ( , ) = 1 → 𝑑(𝑋, 𝐹) = 𝑑(𝑋, 𝐷) → 𝑥 + 𝑦 = 𝑥 + 𝑦 + 4 2 → 𝑥 + 𝑦 = 𝑥 + 𝑦 + 4 2 → 2𝑥 + 2𝑦 = 𝑦 + 2𝑥𝑦 + 𝑥 + 8𝑥 + 8𝑦 + 16 → 𝑥 + 𝑦 − 2𝑥𝑦 − 8𝑥 − 8𝑦 − 16 = 0 Cónicas y ecuación de segundo grado Ecuación general de segundo grado: Ax2 + Bxy + Cy2 + Dx + Ey +F = 0 con A, B y C ≠ 0 La ecuación general se puede reescribir como: Cy2 + (Bx + E)y + (Ax2+ Dx +F) = 0 A continuación se puede resolver en y:
- 2. 28/03/2020 2 Cónicas y ecuación de segundo grado El radicando de la ecuación obtenida es: Es una ecuación cuadrática en x con discriminante: 0 0 0 Analizando los posibles valores para las cónicas se concluye que : Cónicas y ecuación de segundo grado Ax2 + Cy2 + Dx + Ey +F = 0 con A y C ≠ 0 (x – h)2 + (y – k)2 = r2 (𝑥 − ℎ) 𝑎 ± (𝑦 − 𝑘) 𝑏 = 1 Circunferencia Elipse o hipérbola (x – h)2 = 4p(y – k) Parábola (y – k)2 = 4p(x – h) (𝑦 − 𝑘) 𝑎 ± (𝑥 − ℎ) 𝑏 = 1 Determinar el tipo de cónica que corresponde a la siguiente expresión: x2 + y2 – 4x + 2y – 20 = 0 Cónicas y ecuación de segundo grado Completando cuadrados: x2 – 4x + (2)2 + y2 + 2y + (1)2 = 20 + (2)2 + (1)2 (x – 2)2 + (y + 1)2 = 25 (x – h)2 + (y – k)2 = 52 (x – h)2 + (y – k)2 = r2 Circunferencia u2 + v2 = 52 (x – 2)2 + (y + 1)2 = 52 u v u v (2, –1) u = x – 2 v = y + 1 x = u + 2 y = v – 1 Traslación de ejes Traslación de ejes Una parábola tiene su vértice en V(3, 4) y su foco en F(3, 6). Obtenga su ecuación cartesiana. Como el vértice y el foco están sobre el eje de la parábola, en este caso la parábola tiene su eje sobre la recta x = 3 Traslación de ejes Si se traza un par de ejes de coordenadas x´, y´ con origen en el vértice V(3, 4) se puede plantear: x´2 = 4py´ El valor de p es la diferencia entre las ordenadas de V(3, 4) y F(3, 6): p = 6 – 4 = 2 x´2 = 8y´ Pero x´= x – 3; y´= y – 4 (x – 3)2 = 8(y – 4) x2 – 6x – 8y + 41 = 0
- 3. 28/03/2020 3 Traslación de ejes Obtenga una ecuación en x´e y´de la siguiente cónica: 9x2 – 4y2 + 36x – 24y – 36 = 0, de manera que el centro de la gráfica esté sobre el origen del sistema de coordenadas x´y´. Grafique. 9x2 – 4y2 + 36x – 24y – 36 = 0 9(x2 + 4x) – 4(y2 + 6y) = 36 9(x2 + 4x + 4) – 4(y2 + 6y +9) = 36 +36 – 36 9(x +2)2 – 4(y +3)2 = 36 (x +2)2 /4– (y +3)2/9= 1 Traslación de ejes (x – (– 2) )2 /4– (y – (– 3))2/9= 1 (x +2)2 /4– (y +3)2/9= 1 Traslación de ejes Encuentre las coordenadas del vértice V y del foco F de la parábola: y2 + 4x + 6y + 1 = 0. y2 + 6y = – 4x – 1 y2 + 6y + 9 = – 4x – 1 + 9 (y + 3)2 = – 4x + 8 (y + 3)2 = – 4(x – 2) (y – (– 3))2 = – 4(x – 2) Si x´= x – 2 y´= y + 3 y´2 = – 4x´ V(x´, y´) = (0, 0) F(x´,y´)= (–1, 0) V(x, y) = (0 + 2, 0 + (– 3)) V(x, y) = (2, – 3) F(x, y) = (–1 + 2, 0 + (– 3)) F(x, y) = (1, – 3) Rotación de ejes Al rotar los ejes de coordenadas alrededor del origen y considerar fijos todos los puntos del plano, entonces todo punto o vector, salvo el origen, tendrá un nuevo par de coordenadas o componentes. La determinación de esas nuevas coordenadas se puede realizar empleando la trigonometría Rotación de ejes Los nuevos ejes x´y´ se obtienen al girar los ejes xy un ángulo Ø alrededor del origen θ: dirección respecto a x ; (θ – Ø): dirección respecto a x´ x = r cosθ y = r senθ x´ = r cos(θ – Ø) y´ = r sen(θ – Ø) Rotación de ejes Se sabe: cos(θ – Ø) = cosθ.cos Ø + senθ.senØ sen(θ – Ø) = senθ.cos Ø – cosθ.senØ Entonces: Pero si x = r cosθ ˄ y = r senθ Finalmente: x´ = x.cos Ø + y.senØ y´ = y.cos Ø – x.senØ x = x´.cos Ø – y´.senØ y = x´.sen Ø + y´.cosØ x´ = rcosθ.cos Ø + rsenθ.senØ y´ = rsenθ.cos Ø – rcosθ.senØ
- 4. 28/03/2020 4 Rotación de ejes Encuentre las nuevas coordenadas (x´, y´) que resultan de un giro Ø = 30° de los ejes, de los puntos S(4, - 2) y T(3, 1). Para S se tiene: x´ = 4.( 3 2 ⁄ ) + (-2).(1 2 ⁄ ) = 2 3 - 1 sen 30° = 1/2 cos 30° = 3 2 ⁄ x´ = x.cos Ø + y.senØ y´ = y.cos Ø – x.senØ y´ = -2.( 3 2 ⁄ ) - 4.(1 2 ⁄ ) = - 2 - 3 Rotación de ejes Para T se tiene: x´ = 3.( 3 2 ⁄ ) + 1.(1 2 ⁄ ) = (3 3 + 1)/2 x´ = x.cos Ø + y.senØ y´ = y.cos Ø – x.senØ y´ = 1.( 3 2 ⁄ ) - 3.(1 2 ⁄ ) = (- 3 + 3 )/2 En las nuevas coordenadas: S(2 3 - 1, - 2 - √3) T((3 3 + 1)/2, (- 3 + 3 )/2) S(4, - 2) T(3, 1) Rotación de ejes Hallar las distancias entre los puntos S(4, - 2) y T(3, 1) en sus coordenadas (x, y) y en(x´, y´) Distancia entre los puntos S y T en (x, y): d(S, T) = [(4 - 3)2 + (-2 - 1)2]1/2 = [(1)2 + (-3)2]1/2 d(S, T) = 10 Distancia entre los puntos S y T en (x´, y´): d(S, T) = [[(3 - 3 )/2]2 + [(1 + 3 3 )/2]2]1/2 = [(9 - 6 3 + 3)/4 + (1 + 6 3 + 27)/4]1/2 d(S, T) = 10 Es igual en ambas coordenadas Haciendo girar los ejes un ángulo de 45°, probar que la ecuación 𝑥 + 2𝑥𝑦 + 𝑦 + 8𝑥 − 8𝑦 = 0 es una parábola. x = x´.cos Ø – y´.senØ y = y´.sen Ø + x´.cosØ x = x´.cos 45° – y ´.sen45° y = y´.sen 45° + x´.cos45° 𝑥 = ´ ´ 𝑦 = ´ ´ Se debe ver cómo quedan las nuevas coordenadas haciendo girar los ejes un ángulo de 45° Las nuevas coordenadas se reemplazan en 𝑥 +𝑥𝑦 + 𝑦 + 8𝑥 − 8𝑦 = 0 𝑥´ − 𝑦´ 2 + 2 (𝑥´ − 𝑦´) 2 (𝑥´ + 𝑦´) 2 + 𝑥´ + 𝑦´ 2 + 8 (𝑥´ − 𝑦´) 2 − 8 (𝑥´ + 𝑦´) 2 = 0 Rotación de ejes 𝑥´ − 2𝑥´𝑦´ + 𝑦´ 2 + 2 𝑥´ − 𝑦´ 2 + 𝑥´ + 2𝑥´𝑦´ + 𝑦´ 2 + 8𝑥´ − 8𝑦´ 2 − 8𝑥´ + 8𝑦´ 2 = 0 𝑥´ −2𝑥´𝑦´ + 𝑦´ + 2𝑥´ − 2𝑦´ + 𝑥´ + 2𝑥´𝑦´ + 𝑦´ 2 − 16𝑦´ 2 = 0 𝑥´ − 𝑦´ 2 + 2 (𝑥´ − 𝑦´) 2 (𝑥´ − 𝑦´) 2 + 𝑥´ + 𝑦´ 2 + 8 (𝑥´ − 𝑦´) 2 − 8 (𝑥´ + 𝑦´) 2 = 0 4𝑥´ 2 − 16𝑦´ 2 = 0 𝑥´ = 4 2 𝑦´ 𝑥 + 2𝑥𝑦 + 𝑦 + 8𝑥 − 8𝑦 = 0 𝑥´ = 4 2 𝑦´
- 5. 28/03/2020 5 Haciendo girar los ejes un ángulo de 45°, probar que la ecuación 𝑥 + 𝑥𝑦 + 𝑦 = 1 es una elipse. x = x´.cos Ø – y´.senØ y = y´.sen Ø + x´.cosØ x = x´.cos 45° – y ´.sen45° y = y´.sen 45° + x´.cos45° 𝑥 = ´ ´ 𝑦 = ´ ´ Se debe ver cómo quedan las nuevas coordenadas haciendo girar los ejes un ángulo de 45° Las nuevas coordenadas se reemplazan en 𝑥 +𝑥𝑦 + 𝑦 = 1 𝑥´ − 𝑦´ 2 + (𝑥´ − 𝑦´) 2 (𝑥´ + 𝑦´) 2 + 𝑥´ + 𝑦´ 2 = 1 Rotación de ejes 𝑥´ − 𝑦´ 2 + (𝑥´ − 𝑦´) 2 (𝑥´ − 𝑦´) 2 + 𝑥´ + 𝑦´ 2 = 1 𝑥´ − 2𝑥´𝑦´ + 𝑦´ 2 + 𝑥´ − 𝑦´ 2 + 𝑥´ + 2𝑥´𝑦´ + 𝑦´ 2 = 1 𝑥´ − 2𝑥´𝑦´ + 𝑦´ + 𝑥´ − 𝑦´ + 𝑥´ + 2𝑥´𝑦´ + 𝑦´ = 2 3𝑥´ + 𝑦´ = 2 𝑥´ 2/3 + 𝑦´ 2 = 1 𝑥 + 𝑥𝑦 + 𝑦 = 1 𝑥´ 2/3 + 𝑦´ 2 = 1 Rotación de ejes Obtener la ecuación en (x´, y´) de la gráfica xy = 4 bajo una rotación de ejes alrededor del origen con Ø = 45°. Graficar. sen 45° = 1/√2 cos 45° = 1/√2 x = (x´– y´)/√2 y = (x´+ y´)/√2 Si xy = 4: [(x´– y´)/√2].[(x´+ y´)/√2] = 4 (x´2 - y´2)/2] = 4 x´2 - y´2 = 8 x´2 /8 - y´2/8 = 1 Rotación de ejes x´2 /8 - y´2/8 = 1 Es una hipérbola con el eje principal sobre el eje y´ La gráfica original es una hipérbola con su eje principal que forma un ángulo de 45° con la parte positiva del eje x. 𝑥𝑦 = 4 − = 1
- 6. 28/03/2020 6 Rotación de ejes en una cuadrática Ya se vio la ecuación general de segundo grado: Ax2 + Bxy + Cy2 + Dx + Ey +F = 0 con A, B y C ≠ 0 Y el caso en que B = 0: Ax2 + Cy2 + Dx + Ey +F = 0 con A y C ≠ 0 También se vio como en esta última expresión se puede completar cuadrados para llegar a varias formas de las cónicas. Rotación de ejes Si B ≠ 0: Ax2 + Bxy + Cy2 + Dx + Ey +F = 0 Con x = x´.cosØ – y´.senØ Ʌ y = x´.senØ + y´.cosØ Sería: A´x´2 + B´x´y´+ C´y´2 + D´x´ + E´y´ + F´ = 0 Ax2 = A (x´.cosØ – y´.senØ) 2 = = A (x´2.cos2Ø – 2x´y´cosØ.senØ + y´2 sen2Ø) Bxy = B(x´.cos Ø – y´.senØ)(x´.senØ + y´.cosØ) = B(x´2.senØcosØ + x´y´.cos2Ø – x´y´sen2Ø – y´2 senØcosØ) Rotación de ejes Cy2 = C (x´.senØ + y´.cosØ)2 = = C (x´2.sen2Ø + 2x´y´cosØ.senØ + y´2 cos2Ø) Dx = D(x´.cosØ – y´.senØ) Ey = E(x´.senØ + y´.cosØ) F = F´ Se hace la suma: Ax2 + Bxy + Cy2 + Dx + Ey +F = 0 Rotación de ejes Ax2 = A (x´2.cos2Ø – 2x´y´cosØ.senØ + y´2 sen2Ø) Bxy = B(x´2.senØcosØ + x´y´.cos2Ø – x´y´sen2Ø – y´2senØ.cosØ) Cy2 = C (x´2.sen2Ø + 2x´y´cosØ.senØ + y´2 cos2Ø) Dx = D(x´.cos Ø – y´.senØ) Ey = E(x´.sen Ø + y´.cosØ) F = F´ Rotación de ejes A´= A.cos2Ø + B.cosØ.senØ + C.sen2Ø B´= 2(C – A).cosØ.senØ + B(cos2Ø – sen2Ø) C´= A. sen2Ø – B.cosØ.senØ + C. cos2Ø D´ = D.cosØ + E.senØ E´ = – D.senØ + E.cosØ F´= F Los coeficientes de la nueva expresión, ya girada, A´x2 + B´xy + C´y2 + D´x + E´y +F´ = 0, serán Rotación de ejes Si se quiere que no haya términos en x´y´, el término B´ debe ser igual a cero: B´= 0 B´= 2(C – A).cosØ.senØ + B(cos2Ø – sen2Ø) = 0 (C – A).2cosØ.senØ + B(cos2Ø – sen2Ø) = 0 sen2Ø cos2Ø (C – A).sen2Ø + B.cos2Ø = 0 Hay que considerar dos casos: 1) A = C y 2) A ≠ C
- 7. 28/03/2020 7 Rotación de ejes 1) Cuando A = C: B.cos2Ø = 0 cos2Ø = 0 2Ø = π/2 + kπ Ø = π/4 + kπ/2 2) Cuando A ≠ C: (C – A).sen2Ø + B.cos2Ø = 0 sen2Ø/cos2Ø =B/(A – C) tg2Ø =B/(A – C) (Ø = π/4) Se puede escoger que 0 < 2Ø < π 0 < Ø < π/2 Se trataría de un ángulo agudo Rotación de ejes Mediante una rotación de ejes identificar y graficar la siguiente cónica: x2 – 3xy + 5y2 – 4 = 0 A = 1; B = – 3; C = 5 tg2Ø = – 3/(1 – 5) tg2Ø = 3/4 Rotación de ejes Si x = x´.cos Ø – y´.senØ Ʌ y = x´.sen Ø + y´.cosØ Reemplazando en x2 – 3xy + 5y2 – 4 = 0: x2 – 3xy + 5y2 – 4 = 0 Invariancia bajo rotación de ejes A´= A.cos2Ø + B.cosØ.senØ + C.sen2Ø C´= A. sen2Ø – B.cosØ.senØ + C.cos2Ø Los coeficientes A´ y C´de la cuadrática, ya girada, A´x2 + B´xy + C´y2 + D´x + E´y +F´ = 0, son Si se hace A´ + C´: A´+ C´= A.cos2Ø + A.sen2Ø + C.sen2Ø + C.cos2Ø A´+ C´= A.(cos2Ø + sen2Ø) + C.(sen2Ø + cos2Ø) A´+ C´= A + C No varía la suma Invariancia bajo rotación de ejes Si se hace B´2 – 4A´C´: B´2 = [2(C – A).u.v + B(u2 – v2)]2 (con u = cosØ; v = senØ) = 4(C – A)2.u2.v2 + 4B(C – A)u.v.(u2 – v2) + B2 (u2 – v2)2 = 4(C2 – 2AC + A2).u2.v2 + 4B(C – A)u.v.(u2 – v2) + B2 (u2 – v2)2 B´2 = 4C2.u2.v2 – 8AC.u2.v2 + 4A2.u2.v2 + 4BC.u.v.(u2 – v2) – 4BA.u.v.(u2 – v2) + B2 (u2 – v2)2
- 8. 28/03/2020 8 – 4A´C´= – 4(A.u2 + B.u.v + C.v2)(A.v2 – B.u.v + C.u2) Invariancia bajo rotación de ejes = – 4A2.u2 v2 + 4A.B.u3.v – 4ACu3 – 4AB.u.v3 + 4B2.u2.v2 – 4BC.u3.v – 4A.C.v4 + 4B.C.u.v3 – 4C2.u2v2 – 4A´C´= – 4A2.u2 v2 + 4A.B.u.v(u2 – v2) – 4ACu4 + 4B2.u2.v2 – 4BC.u.v(u2 – v2) – 4A.C.v4 – 4C2.u2v2 B´2 – 4A´C´= 4C2.u2.v2 – 8AC.u2.v2 + 4A2.u2.v2 + 4BC.u.v.(u2 – v2) – 4BA.u.v.(u2 – v2) + B2 (u2 – v2)2 – 4A2.u2 v2 + 4A.B.u.v(u2 – v2) – 4ACu4 + 4B2.u2.v2 – 4BC.u.v(u2 – v2) – 4A.C.v4 – 4C2.u2v2 B´2 – 4A´C´= Invariancia bajo rotación de ejes B2 (u2 – v2)2 – 8AC.u2.v2 – 4ACu4 + 4B2.u2.v2 – 4A.C.v4 = B2 (u2 – v2)2 + 4B2.u2.v2 – 4AC(u4 +2u2.v2 + v4) B´2 – 4A´C´= Invariancia bajo rotación de ejes B2 [(u2 – v2)2 + 4B2.u2.v2] – 4AC(u4 +2u2.v2 + v4) = B2 (u2 + v2)2 – 4AC(u2 + v2)2 = B2 (1)2 – 4AC(1)2 = B2 – 4AC B´2 – 4A´C´= B2 – 4AC No varía el discriminante Si con la rotación de ejes no hay variación en el discriminante, se puede aplicar el mismo criterio para determinar el tipo de cónica de acuerdo al signo y valor del discriminante, tanto con la expresión original como en la rotada.