Descargado 427 veces
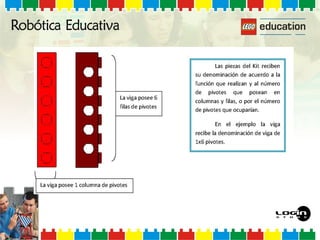
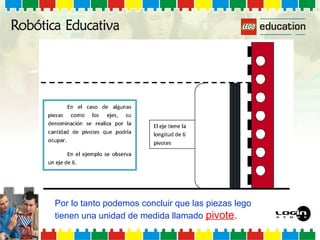
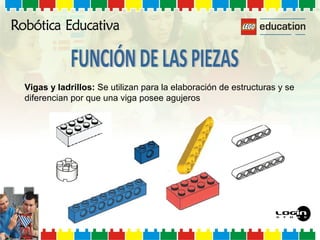



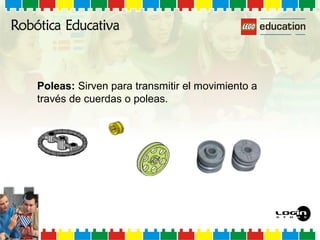



Las piezas LEGO tienen una unidad de medida llamada pivote. Se utilizan vigas, ladrillos, planchas, ruedas, engranajes, poleas y otros elementos para construir estructuras, transmitir movimiento y reducir la fricción. Los motores y sensores permiten que los robots se muevan y recopilen información.