
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a TMR0 Y RB0_INT
Similar a TMR0 Y RB0_INT (20)
Más de Luis Zurita
Más de Luis Zurita (20)
Último
Último (20)
TMR0 Y RB0_INT
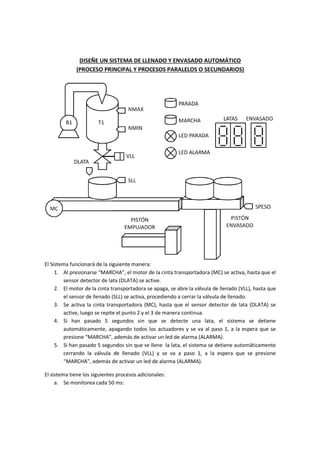
- 1. DISEÑE UN SISTEMA D (PROCESO PRINCIPAL Y PROCESOS PARALELOS O SECUNDARIOS) El Sistema funcionará de la siguiente manera: 1. Al presionarse “MARCHA”, el motor de la cinta transportadora (MC) se activa, hasta que el sensor detector de lata (DLATA) se active. 2. El motor de la cinta transportadora se apaga, se abre la válvula de llenado (VLL) el sensor de llenado (SLL) se activa, procediendo a cerrar la válvula de llenado. 3. Se activa la cinta transportadora (MC), hasta que el sensor detector de lata (DLATA) se active, luego se repite el punto 2 y el 3 de manera continua. 4. Si han pasado 5 segundos sin que se detecte una lata, el sistema se detiene automáticamente, apagando todos los actuadores y se va al paso 1, a la espera que se presione “MARCHA”, además de activar un led de 5. Si han pasado 5 segundos sin que se llene la lata, el sistema se detiene automáticamente cerrando la válvula de llenado (VLL) y se va a paso 1, a la espera que se presione “MARCHA”, además de activar un led de alarma (ALARMA). El sistema tiene los siguientes procesos adicionales: a. Se monitorea cada 50 ms: DISEÑE UN SISTEMA DE LLENADO Y ENVASADO AUTOMÁTICO (PROCESO PRINCIPAL Y PROCESOS PARALELOS O SECUNDARIOS) El Sistema funcionará de la siguiente manera: Al presionarse “MARCHA”, el motor de la cinta transportadora (MC) se activa, hasta que el sensor detector de lata (DLATA) se active. transportadora se apaga, se abre la válvula de llenado (VLL) el sensor de llenado (SLL) se activa, procediendo a cerrar la válvula de llenado. Se activa la cinta transportadora (MC), hasta que el sensor detector de lata (DLATA) se se repite el punto 2 y el 3 de manera continua. Si han pasado 5 segundos sin que se detecte una lata, el sistema se detiene automáticamente, apagando todos los actuadores y se va al paso 1, a la espera que se presione “MARCHA”, además de activar un led de alarma (ALARMA). Si han pasado 5 segundos sin que se llene la lata, el sistema se detiene automáticamente cerrando la válvula de llenado (VLL) y se va a paso 1, a la espera que se presione “MARCHA”, además de activar un led de alarma (ALARMA). tiene los siguientes procesos adicionales: Se monitorea cada 50 ms: E LLENADO Y ENVASADO AUTOMÁTICO (PROCESO PRINCIPAL Y PROCESOS PARALELOS O SECUNDARIOS) Al presionarse “MARCHA”, el motor de la cinta transportadora (MC) se activa, hasta que el transportadora se apaga, se abre la válvula de llenado (VLL), hasta que el sensor de llenado (SLL) se activa, procediendo a cerrar la válvula de llenado. Se activa la cinta transportadora (MC), hasta que el sensor detector de lata (DLATA) se Si han pasado 5 segundos sin que se detecte una lata, el sistema se detiene automáticamente, apagando todos los actuadores y se va al paso 1, a la espera que se Si han pasado 5 segundos sin que se llene la lata, el sistema se detiene automáticamente cerrando la válvula de llenado (VLL) y se va a paso 1, a la espera que se presione
- 2. a.1. El nivel del tanque (T1), si el nivel esta en mínimo (NMIN) se activa la bomba 1 (B1) hasta que se llegue al nivel máximo (NMAX), desactivándose la bomba 1 (B1). a.2. El peso en el pistón de envasado con el sensor de peso (SPESO), si se ha activado, el pistón se activa bajando, se activa el pistón empujador a los 3 segundos, y luego de de 3 segundos más, se desactivan el pistón empujador y desactivándose el pistón de envasado, subiendo para recibir más latas de pintura. Nota: Cuando se activa la secuencia de los pistones, se debe completar para no dañar el funcionamiento de los mismos. Por seguridad, B1=VLL=MC= se desactivan y al finalizar la secuencia, se deben dejar como estaban antes de entrar en esta secuencia y se debe continuar con el proceso exactamente desde donde se detuvo para no afectar el normal funcionamiento del sistema. b. Si se presiona el botón “PARADA”, el sistema se detiene en su totalidad, es decir, B1=VLL=MC= Desactivados, y se activa un led que indica que el proceso se encuentra detenido (LED PARADA). Si se desea reactivar el proceso, se debe pulsar nuevamente el botón “PARADA” y se debe continuar con el proceso exactamente desde donde se detuvo para no afectar el normal funcionamiento del sistema. c. Adicionalmente se llevará la cuenta de las latas que se han llenado y la cantidad de envasados que se han realizado. Tabla de asignación de Pines de entrada y salida: ENTRADA ¿Qué pin Asignamos? SALIDA ¿Qué pin Asignamos? MARCHA RA0 Bomba B1 RB3 Sensor Máximo (SMAX) RA1 Válvula llenado (VLL) RB1 Sensor Mínimo (SMIN) RA2 Motor cinta transportadora (MC) RB2 PARADA RB0/INT LED PARADA RB6 Detector lata (DLATA) RA3 Pistón Envasado RB4 Sensor llenado (SLL) RA4 Pistón empujador RB5 Sensor de peso (SPESO) RA5 LED ALARMA RB7 DECODIFICADOR PORTC DISPLAY UNILATA RD0 DISPLAY DECLATA RD1 DISPLAY ENVASADO RD2
- 3. Conceptos teóricos a ser tomados en cuenta para las condiciones de trabajo Puntos 1, 2 y 3. Automatizaciones sencillas, es decir, se presiona “MARCHA” y se monitorean dos sensores (DLATA y SLLENO) para la activación y desactivación del motor de la cinta transportadora (MC). Para el punto 4 y 5, se considerará el “cerrojo automático”, que debe reiniciar el sistema si han transcurrido 5 segundos sin detectar una lata, activando un led de alarma y enviando el programa a esperar por presionarse “MARCHA” nuevamente. En el caso de que la lata se esté llenando y transcurran 5 segundos sin que ésta se llene, se debe cerrar la válvula de llenado, activando el led de alarma y va a esperar que se presione “MARCHA”. Para el punto a, se debe configurar al TMR0 para que se desborde cada 50 ms y genere una interrupción que irá a supervisar las condiciones a.1 y a.2, mediante la exploración simple de los sensores correspondientes (NMAX y NMIN para a.1 actuando sobre la Bomba 1 y SPESO para actuar sobre los pistones de envasado y empujador). En el punto a.1 se deberían realizar los cálculos (ya se hicieron en la guía rápida del TMR0 e Interrupciones), por lo que nos ahorraremos este paso. a saber= Temporización= 4 * 250 ns * (256 – 61 ) * 256 = 49.92 ms ≈ 50 ms, por lo que se carga en el TMR0 el número 61 y en el OPTION_REG=256 En el punto a.2 se utiliza una rutina simple generada por el PicDel de 3 segundos o llamar una rutina de 1 segundo tres veces, como usted prefiera. Para el punto b, se debe configurar una interrupción por cambio de nivel del pin RB0/INT para que detenga todo el sistema, al ser una parada de emergencia de todo el proceso. El uso de esta interrupción debe estar asociado a la rutina de “salvar el entorno” para que cuando se salga de dicha rutina, el sistema siga trabajando exactamente como lo estaba haciendo al momento de producirse la interrupción.
- 4. Los puntos a y b, estarán en la misma rutina de servicio de interrupción (RSI), y para determinar cuál tarea se hará, se deben explorar los señalizadores de interrupciones (TOIF y INTF). Cabe destacar que si la causa de la interrupción es la RB0/INT, se debe desactivar el permiso de interrupción por desborde del TMR0 (TOIE=0) hasta que no se salga de la rutina de parada de emergencia. Para el punto c, se utilizarán las estructuras de contadores clásicos de 00 a 99 para las latas y de 0 a 9 para la cantidad de envasados realizados. El contador de latas se incrementará cada vez que se detecte que una lata se ha llenado totalmente y el contador de envasado se incrementará cuando se termine la secuencia de manejo de los pistones que se ejecuta durante la interrupción de desborde del TMR0 por activación del sensor de peso. Los diagramas de flujo se dividirán en “PROGRAMA PRINCIPAL” y “RSI”, se dejarán expresados los de retardos generados por el PicDel. Teniendo en cuenta estos puntos teóricos, veamos los diagramas del flujo del sistema que se pretende diseñar:
- 6. Rutina de servicio de interrupción (Parte 1) RSI Salvar entorno ¿RB0/INT =0? SI NO Deshabilitar Interrupciones ¿INTF=1? SI NO TESTEO Restaurar entorno SALIR Habilitar Interrupciones INTE=1 TOIE=1 INTF=0 TOIF=0 retfie LED PARADA OFF MCINTA=OFF VLL=OFF B1=OFF PENVASADO=OFF PEMPUJADOR=OFF LED PARADA=ON LED ALARMA=OFF INTE=0 TOIE=0 ¿TOIF=1? NO SI SALIR ¿La causa es por RB0/INT? ¿La causa es por desborde del TMR0?
- 7. Rutina de servicio de interrupción (Parte 2)
- 8. Y después de tener un buen diagrama de flujo, lo demás es carpintería: Lenguaje ensamblador: ;******************************************************************************** ;**********EJEMPLO DE MANEJO DE INTERRUPCIONES POR DESBORDE DE TMR0 Y************ ;*********************CAMBIO DE NIVEL EN PIN RB0/INT***************************** ;************DURANTE EL DESBORDE DEL TMR0 (50mS), CONTROLA EL LLENADO************ ;****************DEL TANQUE 1 Y EL PESO EN EL PISTÓN DE ENVASADO***************** ;*************************PROF. LUIS ZURITA. 14/04/13**************************** ;*********ADICIONAL A ESTO SE MUESTRA EL NÚMERO DE LATAS LLENADAS**************** ;****************Y LA CANTIDAD DE ENVASADOS REALIZADOS*************************** LIST P=16F877A INCLUDE P16F877A.INC ;************ZONA DE DECLARACIONES DE REGISTROS******************* CONTACERR EQU 20H ;REGISTRO PARA CERROJO AUTOMÁTICO PDel0 EQU 21H ;REGISTRO PARA DELAY05S PDel1 EQU 22H ;REGISTRO PARA DELAY05S PDel00 EQU 23H ;REGISTRO PARA DELAY5mS PDel11 EQU 24H ;REGISTRO PARA DELAY5mS W_TEMP EQU 25H ;REGISTRO PARA SALVAR A W STATUS_TEMP EQU 26H ;REGISTRO PARA SALVAR A STATUS PORTB_TEMP EQU 27H ;REGISTRO PARA SALVAR A PORTB PORTC_TEMP EQU 28H ;REGISTRO PARA SALVAR A PORTC PORTD_TEMP EQU 29H ;REGISTRO PARA SALVAR A PORTD CONTASEG EQU 2AH ;REGISTRO PARA DELAY 3 SEGUNDOS UNI EQU 2BH DEC EQU 2CH UNIEN EQU 2DH UNI_TEMP EQU 2EH DEC_TEMP EQU 2FH UNIEN_TEMP EQU 30H ;*******************ZONA DE VECTORES****************************** ORG 00H GOTO INICIO ;VECTOR DE PROGRAMA PRINCIPAL ORG 04H GOTO RSI ;VECTOR DE RUTINA DE INTERRUPCIÓN ;****************************************************************** ;*******************RUTINA DE INTERRUPCIÓN************************* ;****************************************************************** RSI BCF INTCON,7 ;GIE=0, ATIENDE UNA INTERRUPCIÓN BTFSS INTCON,1 ;INTF=1? CAUSADA POR RB0/INT?
- 9. GOTO INTMR0 ;NO. EXPLORAR SI ES DESBORDE DE TMR0 ;********REALIZA LA PARADA DE EMERGENCIA (PUNTO b DEL EJEMPLO)********** CALL PUSH ;SI. VA A SALVAR ENTORNO CALL DELAY05S ;ANTIREBOTE PARA RB0/INT REINICIAR BTFSC PORTB,0 ;SE PRESIONO RB0 PARA REINICIAR? GOTO REINICIAR ;NO. ESPERA AQUI CALL DELAY15MS ;SI. COLOCAMOS ANTIREBOTE BTFSS PORTB,0 ;PARA EVITAR FALSOS DISPAROS GOTO AQUI ;ESPERA A QUE SE PRESIONE RB0 CALL POP ;RESTAURA EL ENTORNO ;**********ESTO SE HACE ANTES DE SALIR DE LA INTERRUPCIÓN*************** SALIR BSF INTCON,7 ;GIE=1 BCF INTCON,1 ;SE BORRAN SEÑALIZADORES INTF=0 ;Y TOIF PARA EVITAR FALSOS DISPAROS BCF INTCON,2 BSF INTCON,4 ;SE ACTIVA INTE=1 BSF INTCON,5 ;SE ACTIVA TOIE=1 RETFIE ;SALE DE LA INTERRUPCIÓN ;**EXPLORA SI LA CAUSA DE LA INTERRUPCIÓN HA SIDO POR DESBORDE DEL TMR0** INTMR0 BTFSS INTCON,2 ;INTF=1? CAUSADA POR DESBORDE DE TMR0? GOTO SALIR ;NO. SALE DE INTERRUPCIÓN ;******************************************************************************* ;******SI ES POR DESBORDE DEL TMR0, MONITOREA EL CONTROL DE NIVEL DE TANQUE1****** ;**************************** (PUNTO a.1 DEL EJEMPLO)***************************** TESTEOBCF INTCON,5 ;SI. TOIE=0. BTFSC PORTA,2 ;SI. NIVEL MÍNIMO DE TANQUE1? GOTO NMAXIMO ;NO. TESTEAR NIVEL MÁXIMO DE TANQUE1 BSF PORTB,3 ;SI. ACTIVA BOMBA1 GOTO CARGA ;VA A PREGUNTAR POR PESO DE PISTON NMAXIMO BTFSC PORTA,1 ;NIVEL MÁXIMO DE TANQUE 1? GOTO CARGA ;NO. TESTEAR CARGA EN PISTON DE EMPAQUETAR BCF PORTB,3 ;SI. DESACTIVA BOMBA1 GOTO CARGA ;VA A PREGUNTAR POR PESO DE PISTON ;******************************************************************************** ;*************LUEGO DE CONTROLAR EL NIVEL DEL TANQUE 1, VA A EXPLORAR************** ;***********************EL PESO EN PISTON DE ENVASADO**************************** ;**************************** (PUNTO a.2 DEL EJEMPLO)***************************** CARGA BTFSC PORTA,5 ;PESO COMPLETO EN PISTON DE EMPAQUETAR? GOTO CARGARTMR0 ;NO. VA A CARGAR TMR0 ANTES DE SALIR CALL PUSH ;VA A SALVAR ENTORNO BSF PORTB,4 ;SI. ACTIVA SECUENCIA DE EMPAQUETAR CALL DELAY3S ;ESPERA 3 SEGUNDOS MIENTRAS BAJA PISTON1
- 10. BSF PORTB,5 ;ACTIVA PISTON DE EMPUJE CALL DELAY3S ;ESPERA 3 SEGUNDS MIENTRAS SE ;EMPUJAN LAS LATAS BCF PORTB,5 ;RETORNA PISTON DE EMPUJE CALL DELAY3S ;ESPERA 3 SEGUNDOS BCF PORTB,4 ;RETORNA PISTON DE EMPAQUETAR Y VA ;A CARGAR TMR0 CALL CONTAENV CALL POP ;VA A RESTAURAR ENTORNO CARGARTMR0 MOVLW .61 ;CARGA VALOR DE TMR0 PARA NUEVA MOVWF TMR0 ;TEMPORIZACIÓN DE 50mS GOTO SALIR ;SALE DE INTERRUPCIÓN ;*********************************************************************** ;*********FIN DE RUTINA DE INTERRUPCIÓN POR DESBORDE DEL TMR0*********** ;*********************************************************************** ;*********************************************************************** ;***************************PROGRAMA PRINCIPAL************************** ;************************ZONA DE CONFIGURACIONES************************ ;*********************************************************************** INICIO BCF STATUS,6 ;SELECCIONAMOS BSF STATUS,5 ;EL BANCO 1 MOVLW B'00000110' ;CONFIGURAMOS PORTA COMO ENTRADA MOVWF ADCON1 ;O SALIDA DIGITAL MOVLW 0FFH MOVWF TRISA ;CONFIGURAMOS PORTA COMO ENTRADA MOVLW B'00000001' ;CONFIGURAMOS PORTB MOVWF TRISB ;(RB0=ENTRADA, RESTO SALIDA) CLRF TRISC CLRF TRISD MOVLW B'00000111' ;CONFIGURAMOS TMR0 COMO TEMPORIZADOR MOVWF OPTION_REG ;CON PRESCALER DE 256 MOVLW B'10000000' ;HABILITAMOS LA INTERRUPCIÓN GLOBAL MOVWF INTCON ;GIE=1 BCF STATUS,5 ;REGRESAMOS AL BANCO 0 CLRF UNI CLRF DEC CLRF UNIEN CLRF PORTB ;TODOS LOS ACTUADORES DESACTIVADOS CLRF PORTD MARCHA CALL MOSTRAR BCF PORTB,2 ;MCINTA OFF
- 11. BTFSC PORTA,0 ;MARCHA? GOTO MARCHA ;NO. ESPERAMOS A QUE SE PRESIONE BCF PORTB,7 ;LED ALARMA OFF BSF PORTB,2 ;MCINTA ON CLRF CONTACERR ;CONTACERR=0 CICLO BTFSC PORTA,3 ;DLATA? GOTO CERROJO ;NO. VA A CERROJO AUTOMÁTICO GOTO SIGUEPRO ;SI. VA A INICIAR PROCESO CERROJO MOVF CONTACERR,0 SUBLW .200 BTFSS STATUS,2 ;CONTACERR=200? GOTO SUBECERR ;NO. INCREMENTA CONTACERR BSF PORTB,7 ;SI. HA PASADO 3 SEGUNDOS.LED ALARMA ON MOVLW .61 ;CARGA VALOR DE TMR0 PARA MOVWF TMR0 ;TEMPORIZACIÓN DE 50mS BCF INTCON,5 ;TOIE=0 BCF INTCON,4 ;INTE=0 GOTO MARCHA ;VA A ESPERAR QUE SE PRESIONE MARCHA SUBECERR INCF CONTACERR,1 ;CONTACERR=CONTACERR+1 CALL MOSTRAR ;DELAY15MS ;15mS*200= 3 SEGUNDOS CALL MOSTRAR GOTO CICLO ;ESPERAMOS A QUE SE DETECTE LATA SIGUEPRO CLRF CONTACERR ;AL DETECTARSE LATA SIGUE EL PROCESO BCF PORTB,2 ;MCINTA OFF BSF PORTB,1 ;VLL ON BSF INTCON,5 ;TOIE=1 BSF INTCON,4 ;INTE=1 ;*** SLLENO BTFSC PORTA,4 ;SLL=0? SE LLENO LA LATA? GOTO CERROJO2 ;NO. VA A CERROJO AUTOMÁTICO BCF PORTB,1 ;VLLENADO OFF BSF PORTB,2 ;MCINTA ON CALL CONTADOR ;INCREMENTA NRO DE LATAS LLENADAS GOTO CICLO ;VA A REPETIR PROCESO NUEVAMENTE CERROJO2 MOVF CONTACERR,0 SUBLW .200 BTFSS STATUS,2 ;CONTACERR=200? GOTO SUBECERR2 ;NO. INCREMENTA CONTACERR BSF PORTB,7 ;SI. HA PASADO 3 SEGUNDOS.LED ALARMA ON BCF PORTB,1 ;VLL OFF BCF INTCON,5 ;TOIE=0 BCF INTCON,4 ;INTE=0
- 12. GOTO MARCHA ;VA A ESPERAR QUE SE PRESIONE MARCHA SUBECERR2 INCF CONTACERR,1 ;CONTACERR=CONTACERR+1 CALL MOSTRAR ;DELAY15MS ;15mS*200= 3 SEGUNDOS GOTO SLLENO ;ESPERAMOS A QUE SE LLENE LATA ;*** ;********************************************************************** ;**************************RUTINA DE 15mS****************************** ;********************************************************************** DELAY15MS CLRF CONTASEG ESPERA3 CALL DELAY5MS MOVF CONTASEG,0 SUBLW .3 BTFSS STATUS,2 GOTO SUBESEG3 RETURN SUBESEG3 INCF CONTASEG,1 GOTO ESPERA3 ;********************************************************************** ;************************RUTINA DE 3SEGUNDOS*************************** ;********************************************************************** DELAY3S CLRF CONTASEG ESPERA6 CALL DELAY05S MOVF CONTASEG,0 SUBLW .6 BTFSS STATUS,2 GOTO SUBESEG RETURN SUBESEG INCF CONTASEG,1 GOTO ESPERA6 ;********************************************************************** ;********RUTINA PARA SALVAR EL ENTORNO DURANTE INTERRUPCIÓN************ ;********************************************************************** PUSH BCF INTCON,5 ;TOIE=0. BCF INTCON,4 ;INTE=0. MOVWF W_TEMP MOVF STATUS,0 MOVWF STATUS_TEMP MOVF PORTB,0 MOVWF PORTB_TEMP MOVF PORTC,0 MOVWF PORTC_TEMP MOVF PORTD,0
- 13. MOVWF PORTD_TEMP MOVF UNI,0 MOVWF UNI_TEMP MOVF DEC,0 MOVWF DEC_TEMP APAGADO CLRF PORTD ;DISPLAYS OFF BCF PORTB,1 ;VLL OFF BCF PORTB,2 ;MCINTA OFF BCF PORTB,3 ;B1 OFF BCF PORTB,4 ;PENVASADO OFF BCF PORTB,5 ;PEMPUJADOR OFF BSF PORTB,6 ;LED PARADA ON BCF PORTB,7 ;LED ALARMA OFF RETURN ;********************************************************************** ;*******RUTINA PARA RESTAURAR EL ENTORNO DURANTE INTERRUPCIÓN********** ;********************************************************************** POP MOVF UNI_TEMP,0 MOVWF UNI MOVF DEC_TEMP,0 MOVWF DEC MOVF PORTB_TEMP,0 MOVWF PORTB MOVF PORTC_TEMP,0 MOVWF PORTC MOVF PORTD_TEMP,0 MOVWF PORTD MOVF STATUS_TEMP,0 MOVWF STATUS MOVF W_TEMP,0 RETURN ;********************************************************************** ;***************************RUTINA DE 5mS****************************** ;**********************GENERADA POR EL PICDEL************************** DELAY5MS movlw .6 ; 1 set numero de repeticion (B) movwf PDel00 ; 1 | PLoop11 movlw .207 ; 1 set numero de repeticion (A) movwf PDel11 ; 1 | PLoop22 clrwdt ; 1 clear watchdog decfsz PDel11, 1 ; 1 + (1) es el tiempo 0 ? (A) goto PLoop22 ; 2 no, loop
- 14. decfsz PDel00, 1 ; 1 + (1) es el tiempo 0 ? (B) goto PLoop11 ; 2 no, loop PDelL11 goto PDelL22 ; 2 ciclos delay PDelL22 clrwdt ; 1 ciclo delay return ; 2+2 Fin. ;********************************************************************** ;***************************RUTINA DE 0.5S***************************** ;**********************GENERADA POR EL PICDEL************************** DELAY05S movlw .239 ; 1 set numero de repeticion (B) movwf PDel0 ; 1 | PLoop1 movlw .232 ; 1 set numero de repeticion (A) movwf PDel1 ; 1 | PLoop2 clrwdt ; 1 clear watchdog PDelL1 goto PDelL2 ; 2 ciclos delay PDelL2 goto PDelL3 ; 2 ciclos delay PDelL3 clrwdt ; 1 ciclo delay decfsz PDel1, 1 ; 1 + (1) es el tiempo 0 ? (A) goto PLoop2 ; 2 no, loop decfsz PDel0, 1 ; 1 + (1) es el tiempo 0 ? (B) goto PLoop1 ; 2 no, loop PDelL4 goto PDelL5 ; 2 ciclos delay PDelL5 goto PDelL6 ; 2 ciclos delay PDelL6 goto PDelL7 ; 2 ciclos delay PDelL7 clrwdt ; 1 ciclo delay return ; 2+2 Fin. ;**************************** ;CONTADOR CLÁSICO DE 00 A 99 ;**************************** CONTADOR MOVF UNI,0 ;UNI A W SUBLW .9 BTFSS STATUS,2 ;Z=1? UNI=9? GOTO SUBEUNI GOTO DECENA SUBEUNI INCF UNI,1 ;UNI=UNI+1 RETURN DECENA CLRF UNI MOVF DEC,0 ;DEC A W SUBLW .9 BTFSS STATUS,2 ;Z=1? DEC=9? GOTO SUBEDEC CLRF DEC
- 15. CLRF UNI RETURN SUBEDEC INCF DEC,1 ;DEC=DEC+1 RETURN ;**************************** ;CONTADOR CLÁSICO DE 0 A 9 ;**************************** CONTAENV MOVF UNIEN,0 ;UNI A W SUBLW .9 BTFSS STATUS,2 ;Z=1? UNI=9? GOTO SUBEUNIEN CLRF UNIEN RETURN SUBEUNIEN INCF UNIEN,1 ;UNI=UNI+1 RETURN ;************************************************** ;RUTINA MOSTRAR ;************************************************** MOSTRAR BCF PORTD,2 ;DISPLAY UNIEN OFF BCF PORTD,1 ;DISPLAY DEC OFF BSF PORTD,0 ;DISPLAY UNI ON MOVF UNI,0 ;UNI A W MOVWF PORTC ;UNI ES SACADO HACIA PORTC CALL DELAY5MS BCF PORTD,2 ;DISPLAY UNIEN OFF BSF PORTD,1 ;DISPLAY DEC ON BCF PORTD,0 ;DISPLAY UNI OFF MOVF DEC,0 ;DEC A W MOVWF PORTC ;DEC ES SACADO HACIA PORTC CALL DELAY5MS BSF PORTD,2 ;DISPLAY UNIEN ON BCF PORTD,1 ;DISPLAY DEC OFF BCF PORTD,0 ;DISPLAY UNI OFF MOVF UNIEN,0 ;UNIEN A W MOVWF PORTC ;UNIEN ES SACADO HACIA PORTC CALL DELAY5MS RETURN END ;FIN DEL PROGRAMA