Propuesta ejercicios fluidsim
•
0 recomendaciones•899 vistas

Ejercicios de PLC con el simulador de FLUIDSIM

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Propuesta ejercicios fluidsim
Similar a Propuesta ejercicios fluidsim (20)
Más de SANTIAGO PABLO ALBERTO
Más de SANTIAGO PABLO ALBERTO (20)
Último
Último (20)
Propuesta ejercicios fluidsim
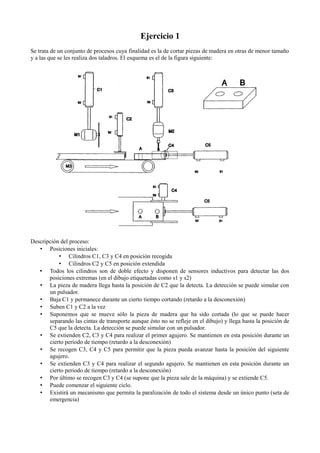
- 1. Ejercicio 1 Se trata de un conjunto de procesos cuya finalidad es la de cortar piezas de madera en otras de menor tamaño y a las que se les realiza dos taladros. El esquema es el de la figura siguiente: Descripción del proceso: • Posiciones iniciales: • Cilindros C1, C3 y C4 en posición recogida • Cilindros C2 y C5 en posición extendida • Todos los cilindros son de doble efecto y disponen de sensores inductivos para detectar las dos posiciones extremas (en el dibujo etiquetadas como s1 y s2) • La pieza de madera llega hasta la posición de C2 que la detecta. La detección se puede simular con un pulsador. • Baja C1 y permanece durante un cierto tiempo cortando (retardo a la desconexión) • Suben C1 y C2 a la vez • Suponemos que se mueve sólo la pieza de madera que ha sido cortada (lo que se puede hacer separando las cintas de transporte aunque ésto no se refleje en el dibujo) y llega hasta la posición de C5 que la detecta. La detección se puede simular con un pulsador. • Se extienden C2, C3 y C4 para realizar el primer agujero. Se mantienen en esta posición durante un cierto periodo de tiempo (retardo a la desconexión) • Se recogen C3, C4 y C5 para permitir que la pieza pueda avanzar hasta la posición del siguiente agujero. • Se extienden C3 y C4 para realizar el segundo agujero. Se mantienen en esta posición durante un cierto periodo de tiempo (retardo a la desconexión) • Por último se recogen C3 y C4 (se supone que la pieza sale de la máquina) y se extiende C5. • Puede comenzar el siguiente ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 2. Ejercicio 2 Se trata de controlar el movimiento de una grúa que realiza dos secuencias de movimientos. El esquema es el de la figura siguiente: Descripción del proceso: • Posiciones iniciales: • La grúa estará en la parte inferior izquierda. • Detector de fin de carrera 1 activado. • Los detectores de fin de carrera 2, 3 y 4 estarán desactivados • Todos los motores se simbolizarán como cilindros (representan accionadores o actuadores). • La grúa partirá de la posición de reposo. • Cuando se pulse sobre un botón, la grúa subirá hasta la posición 2. • El carro se desplazará desde la posición 3 a la 4 (hay que percatarse de que el carro lleva consigo al soporte donde se encuentra el motor que hace subir y bajar la grúa con los detectores de final de carrera de las posiciones 1 y 2). • La grúa bajará hasta la posición 1 permaneciendo en esta posición un determinado tiempo (retardo a la conexión o a la desconexión) • Subirá, de nuevo, hasta la posición 2. • El carro se desplazará desde la posición 4 a la 3 • La grúa bajará hasta la posición 1 permaneciendo en esta posición un determinado tiempo (retardo a la conexión o a la desconexión) • La grúa podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 3. Ejercicio 3 Se trata de gobernar 6 cilindros neumáticos de doble efecto (A, B, C, D, E y F). Descripción del proceso: • Posiciones iniciales: • Todos los cilindros, exceptuando al cilindro A, estarán inicialmente en la posición recogida. • El cilindro A estará, inicialmente, extendido. • Cuando se pulse un botón, se iniciará la siguiente secuencia: • El cilindro A retrocederá. • El cilindro B se extenderá. • El cilindro C se extenderá. • El cilindro B retrocederá. • El cilindro A se extenderá. • El cilindro D se extenderá. • El cilindro D retrocederá. • El cilindro E se extenderá. • El cilindro E retrocederá. • El cilindro D se extenderá. • El cilindro D retrocederá. • El cilindro E se extenderá. • El cilindro E retrocederá. • El cilindro D se extenderá. • El cilindro D retrocederá. • El cilindro C retrocederá. • El cilindro F se extenderá. • El cilindro F retrocederá. • Se podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 4. Ejercicio 4 Se trata de controlar el movimiento de una grúa que realiza secuencias de movimientos para aplicar un acabado superficial sobre piezas metálicas. El esquema es el de la figura siguiente: Descripción del proceso: • El motor de subida-baja de la grúa se asimilará a un cilindro de doble efecto con 2 sensores para detectar los finales de carrera de las posiciones extremas del mismo. • El motor de avance-retroceso se asimilará a un cilindro de doble efecto con 4 sensores para detectar los finales de carrera de las posiciones extremas del mismo y las posiciones intermedias. • Posición inicial: • La grúa partirá de la posición que se muestra en la figura superior, en la que está cogiendo una pieza para ser tratada. • La pieza estará en el interior de la jaula con la que introducirá en cada uno de los 3 depósitos de forma consecutiva • Cuando se pulse un botón, se iniciará la siguiente secuencia: • La grúa subirá pasando de la posición F2 a la F3. • El carro porta-grúa se desplazará de la posición F7 a la F4. • La grúa bajará pasando de la posición F3 a la F2 permaneciendo así durante un cierto tiempo (retardo a la conexión o a la desconexión). • La grúa subirá pasando de la posición F2 a la F3. • El carro porta-grúa se desplazará de la posición F4 a la F5. • La grúa bajará pasando de la posición F3 a la F2 permaneciendo así durante un cierto tiempo (retardo a la conexión o a la desconexión). • La grúa subirá pasando de la posición F2 a la F3. • El carro porta-grúa se desplazará de la posición F5 a la F6. • La grúa bajará pasando de la posición F3 a la F2 permaneciendo así durante un cierto tiempo (retardo a la conexión o a la desconexión). • La grúa subirá pasando de la posición F2 a la F3. • El carro porta-grúa se desplazará de la posición F6 a la F7. • La grúa bajará pasando de la posición F3 a la F2. • Se podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 5. Ejercicio 5 Se trata de controlar el pesado de sustancias. El esquema es el de la figura siguiente: Descripción del proceso: • Habrá tres cilindros que servirán para la apertura de las compuertas C1 y C2 así como para el basculante de la báscula. Los cilindros podrán ser de simple efecto con resorte. • Posición inicial: • La posición de reposo será la que permita que el basculante esté en posición horizontal y ambas compuertas cerradas. • Los sensores 4, 5 y 10 permitirán detectar los finales de carrera de los tres cilindros. • Habrá dos sensores L1 y L2 que servirán para detectar los pesos requeridos. • Cuando se pulse un botón, se iniciará la siguiente secuencia: • Se abrirán ambas compuertas dejando que la sustancia caiga, con gran caudal, sobre el basculante. • Cuando la báscula alcance el primer peso (posición detectada por L1) se cerrará la compuerta C1. • Cuando la báscula alcance el segundo peso (posición detectada por L2) se cerrará la compuerta C2. • Después de que haya pasado un cierto tiempo (retardo a la conexión o a la desconexión) el basculante girará derramando la sustancia pesada. • Se podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 6. Ejercicio 6 Se trata de controlar el movimiento de vaivén de un móvil. El esquema es el de la figura siguiente: Descripción del proceso: • Habrá dos cilindros de simple efecto (o un cilindro con doble vástago) que simulará los dos sentidos de giro del motor. El eje del motor llevará solidario un tornillo “sin fin” a modo de husillo que engranará con el móvil. • Cuando se pulse un botón (M), se iniciará la siguiente secuencia: El mecanismo realizará movimientos de vaivén entre los dos finales de carrera identificados en la figura como F0 y F1. • Cuando se pulse el botón de parada (P) el sistema no se parará en el acto sino que continuará con el movimiento de vaivén parándose al finalizar el mismo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia E). Cuando se pulse dicho mecanismo, el móvil retrocederá hasta la posición inicial inmediatamente con independencia del momento del movimiento de vaivén en el que se encuentre. El sistema no podrá funcionar pulsando el botón de inicio de secuencia (M) sino que deberá ser necesario pulsar el botón de rearme (r) previamente (sólo si se ha pulsado E).
- 7. Ejercicio 7 Se trata de controlar el giro de tres motores (A, B y C). Descripción del proceso: • Cuando se pulse un botón se iniciará la siguiente secuencia: • El motor A arrancará. • Pasado un cierto tiempo el motor A se desconectará y arrancarán los motores B y C. • Pasado un cierto tiempo se desconectará el motor B y arrancará de nuevo el motor A. • Pasado un cierto tiempo se desconectarán A y C. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia).
- 8. Ejercicio 8 Se trata de controlar la realización de dos taladros sobre una pieza. El esquema es el de la figura siguiente: Descripción del proceso: • El sistema constará de 4 cilindros (A, B, C y D), 6 detectores de final de carrera (2, 3, 4, 5, 6 y 7) y un detector de presencia (S2) • Las piezas a taladrar se almacenarán en un conducto alimentador vertical de donde irán saliendo de una en una. • Los 4 cilindros estarán inicialmente en posición recogida. • Cuando se pulse un botón se iniciará la siguiente secuencia: • Si S2 está activado es que hay una pieza preparada para ser procesada • El cilindro A se extenderá y empujará la pieza hacia adelante. • Cuando el cilindro A se extienda por completo llegará a la posición del cilindro C que permanecerá en reposo. Es entonces cuando el cilindro B se extenderá fijando la pieza. • Cuando el cilindro B esté extendido, el cilindro C se extenderá y bajará el taladro para realizar el primer agujero permaneciendo así durante un cierto tiempo. • Pasado dicho tiempo el cilindro C se recogerá subiendo así el taladro. • El cilindro B se recogerá • El cilindro D se extenderá para ubicar la pieza en la posición correcta para que se realice el segundo taladro. • El cilindro B se extenderá volviendo a fijar la pieza. • Cuando el cilindro B esté extendido, el cilindro C se extenderá y bajará el taladro para realizar el segundo agujero permaneciendo así durante un cierto tiempo. • Pasado dicho tiempo el cilindro C se recogerá subiendo así el taladro. • Se recogerán los cilindros A, B y D • Se podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 9. Ejercicio 9 Se trata de comprobar la inserción de tapones en botellas. El esquema es el de la figura siguiente: Descripción del proceso: • El sistema constará de una cinta por la que irán botellas equi-espaciadas, a velocidad constante y supuestamente cerradas con un tapón que ha de ser metálico para poder ser detectado por un sensor inductivo. • Las botellas pasarán por delante de un sensor (detector fotoeléctrico) que detectará su paso. Por encima de las botellas otro detector (esta vez inductivo) detectará la presencia de los tapones. • Cuando los dos sensores se activen, la botella seguirá su camino por la cinta de la izquierda, la cual es movida por el motor de la cinta 1. • Cuando no se active ninguno de los dos o se active el inductivo y no el fotoeléctrico no pasará nada y se actuará como en el caso anterior. • Cuando se active el fotoeléctrico y no lo haga el inductivo estaremos ante una botella sin tapón. Entonces deberá pararse el motor de la cinta 1 y accionarse el de la cinta 2 a la vez que un cilindro empuja la botella hacia esta cinta. • Pasado un cierto tiempo se parará el motor de la cinta 2, se recogerá el cilindro y se accionará el motor de la cinta 1. • Se podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 10. Ejercicio 10 Se trata de controlar una estación de lavado automático. El esquema es el de la figura siguiente: Descripción del proceso: • El sistema constará de una cinta que transportará a los coches que se encuentran en el tren de lavado. Antes de entrar en éste, un semáforo (con dos posiciones y que podrá estar identificado por un cilindro de doble efecto) indicará que puede pasar un coche (posición de verde) o que ya hay un coche en cada una de las posiciones de lavado (posición de rojo). También habrá una barrera que estará levantada (posición de semáforo en verde) o bajada (posición de semáforo en rojo). • El tren de lavado consta de 4 posiciones diferentes: mojado, aplicación de detergente, cepillado y aclarado y secado. En cada posición un detector nos informará sobre si hay o no un coche. Un quinto detector nos indicará cuando van saliendo los coches. • Una vez que la barrera se baje y el semáforo se ponga en rojo, no se volverá a levantar y a poner el semáforo en verde hasta que no hayan salido los 4 coches. Es entonces cuando se podrá comenzar un nuevo ciclo. • Se supone que la distancia entre los vehículos es 0 por lo que a medida que avanzan los coches los diferentes sensores no se desactivan entre coche y coche. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 11. Ejercicio 11 Se trata de regular automáticamente un cruce por semáforos. El esquema es el de la figura siguiente: Descripción del proceso: • Los semáforos se representarán por medio de cilindros con dos posiciones (rojo y verde) no contemplándose la posición de ámbar. No obstante el paso de verde a rojo se puede implementar con un retardo a la conexión/desconexión que identificaría al color ámbar. • El sistema no contemplará el tiempo. Todos los semáforos se activarán o desactivarán por medio de interruptores. Lo que habrá que controlar es que la activación de un determinado semáforo deberá anular a aquellos que puedan desencadenar un accidente. • Los semáforos de los pasos de peatones se encenderán todos a la vez y no deberá permitirse el paso de ningún vehículo. • La lógica de la regulación será la implementada según preferencias propias y se deberá indicar en la memoria. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 12. Ejercicio 12 Se trata de regular automáticamente un elevador clasificador de paquetes. El esquema es el de la figura siguiente: Descripción del proceso: • Una serie de paquetes, con diferentes pesos, vendrá por la cinta 0 y serán pesados en la báscula. • En función del peso se activarán una de dos posibles situaciones: peso 1 y peso 2. Cada una de ellas se identificará por una luz de un color (o por dos cilindros de simple efecto) • El paquete llegará al elevador por medio de la cinta 1 y subirá (habrá que detectar cuando el paquete está sobre el elevador) • En función del peso del paquete éste deberá ir por la cinta 2 o por la cinta 3. Para ello se deberá accionar el cilindro correspondiente. • Los cilindros (A, B y C) dispondrán de finales de carrera (A0, A1, B0, B1, C0, y C1) para controlar los movimientos. Todos comenzarán el ciclo en la posición de recogido. • Antes de que se accione ningún cilindro se deberá esperar un cierto tiempo. • Después de pulsarse el botón de inicio de ciclo, la secuencia de pasos será la siguiente: • El paquete es pesado y se activa la señal en función del peso • El paquete llega al cilindro C que estará recogido • Se espera un tiempo y se sube el paquete. El cilindro C llegará a la posición de extendido. • Se espera un tiempo y saldrá el cilindro A o B (en función del tipo de paquete) estando ambos en posición de recogido hasta ese momento. • Cuando el cilindro A (o B) llegue a la extensión completa, el cilindro C se recogerá. • Cuando el cilindro C llegue a la posición de recogido, el cilindro A (o B) se recogerá. • Cuando todos los cilindros esté recogidos se apagará la señal del tipo de paquete. • Puede comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 13. Ejercicio 13 Se trata de regular automáticamente la temperatura y el nivel de dos depósitos de almacenamiento de un líquido. El esquema es el de la figura siguiente: Descripción del proceso: • Tenemos dos depósitos, comunicados entre, que almacenan un determinado líquido. • En uno de los depósitos hay un sensor de nivel que se activa cuando el agua llega a los límites superior o inferior (nos indica únicamente las situaciones extremas del depósito: vacío o lleno). • En el otro hay un sensor de temperatura que nos indica la temperatura de trabajo. Se supone que cuando no está activado este sensor, la temperatura es siempre inferior (no hay sensor para temperatura por encima de la de trabajo) • Los sensores pueden estar representados por interruptores o por cilindros de dos estados. • Las válvulas de entrada y salida y el motor de la bomba se representarán por cilindros. • El funcionamiento es el siguiente: • Las válvulas de entrada (E1) y salida (E2) estarán abiertas mientras el sensor de temperatura esté activado (se tiene la temperatura ideal de trabajo) y ninguno de los sensores de nivel esté activado (el nivel del líquido está entre los valores adecuados). • Si se activa el sensor de nivel bajo, se cerrará la válvula E1 permaneciendo la E2 abierta • Si se activa el sensor de nivel alto, se cerrará la válvula E2 permaneciendo la E1 abierta • Si el sensor de temperatura se desactiva (la temperatura habrá bajado de la ideal) se activará la bomba y se cerrarán ambas válvulas con independencia de cómo esté el indicador de nivel. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 14. Ejercicio 14 Se trata de regular automáticamente la dosificación y mezcla automática de varias sustancias. El esquema es el de la figura siguiente: Descripción del proceso: • Tenemos dos depósitos (A y B) que almacenan dos sustancias diferentes. • Se abre la compuerta de la sustancia A y se deja caer hasta que en la báscula obtengamos la referencia 1, momento en el que A se deberá cerrar a la vez que (o después de un cierto tiempo) se abre la compuerta B. Cuando se alcance la referencia 2 se cerrará la compuerta B • Una vez alcanzado el peso necesario se activará el motor de la cinta superior. • Cuando se detecte el paso de una briqueta (pastilla soluble), la báscula C pivotará y el motor de la cinta se parará. • Cuando la báscula termine de pivotar, se activará un retardo a la conexión para dejar que la mezcla de líquidos disuelva a la briqueta. • Después de pasado el tiempo, la báscula pivotará hasta las posición de reposo (horizontal) a la vez que el mezclador pivotante oscilará entre las dos posiciones para dejar caer la mezcla final. El mezclador pivotante retornará a la posición inicial. • Puede comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 15. Ejercicio 15 Se trata de regular automáticamente el llenado de botellas y el posterior roscado de tapones. El esquema es el de la figura siguiente: Descripción del proceso: • Tenemos un depósito que almacena un líquido a embotellar. • Las botellas llegan por una cinta que se supone tiene un motor paso a paso cuya velocidad de avance está sincronizada con los tiempos necesarios para el llenado de la botella y el roscado de la misma. • Un detector de posición de botella hace que el cilindro A baje desde la posición F1 a F2 llenando la botella. Después de un cierto tiempo el cilindro retornará de la posición F2 a F1 con lo que se cargará con la cantidad correspondiente a la siguiente botella. Dos válvulas antirretorno se encargarán de que el sentido del líquido sea el correcto. • Un detector de botella llena hace que el cilindro B baje de la posición F3 a F4 roscando el tapón. Después de un cierto tiempo el cilindro retornará de la posición F4 a F3 • Sólo cuando los cilindros A y B estén en las posiciones F1 y F3 respectivamente la cinta se moverá llevando las botellas a la siguiente posición mientras el cilindro C sale de la posición F6 a F5 y retorna inmediatamente. • Sólo cuando el cilindro C esté en la posición F6 se comprobará el estado de los sensores que supervisan la presencia de la botella y de que la misma esté llena. • Puede comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 16. Ejercicio 16 Se trata de regular automáticamente el llenado de un silo de cereales. El esquema es el de la figura siguiente: Descripción del proceso: • Tenemos un sistema de trasvase de grano desde una tolva a 2 silos de diferentes tamaños. • Cuando se pulsa el botón de inicio de secuencia: • Se abre la compuerta de la tolva pasando de la posición 6 a la 7. • Cuando dicha compuerta está abierta el tornillo sin fin empieza a girar y se abren las compuertas 1 y 2 a la vez que se se inicia el movimiento de las cintas 1 y 2 • Los silos 1 y 2 disponen de sensores de vaciado y llenado del silo. • Cuando se activa el sensor de vaciado de un silo, se debe iniciar el funcionamiento de la cinta y la apertura de la compuerta correspondientes. • Cuando se activa el sensor de llenado de un silo, se debe parar el funcionamiento de la cinta y el cierre de la compuerta correspondientes. • Cuando las dos compuertas de los dos silos estén cerradas, sus respectivas cintas estarán paradas y el tornillo sin fin deberá pararse • Cuando el tornillo sin fin se pare, se deberá cerrar la compuerta de la tolva. • Cuando uno de los silos no esté lleno, su cinta y el tornillo sin fin deberán estar funcionando y su compuerta y la de la tolva deberán permanecer abiertas. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 17. Ejercicio 17 Se trata de regular automáticamente el llenado de 3 contenedores. El esquema es el de la figura siguiente: Descripción del proceso: • Suponemos que los recipientes A, B y C llegan por la cinta 1 hasta sus posiciones respectivas. Sabremos que están situados de forma correcta por los sensores inductivos colocados por debajo de la plataforma (etiquetados como detectores 1, 2 y 3 en la figura) la cual se puede mover longitudinalmente entre tres posiciones preestablecidas, gracias a la acción del cilindro D. • Inicialmente el cilindro D estará recogido. • Cuando llegue la primera caja ( C ) se activará el sensor 1 y el cilindro D avanzará hasta la posición intermedia. • Cuando llegue la segunda caja ( B ) se activará el sensor 2 y el cilindro avanzará hasta la posición de extensión total • Cuando llegue la tercera caja ( A ) se activará el sensor 3 • Cuando estén los tres sensores activados, se abrirán las electroválvulas (cada una un tiempo diferente o las tres el mismo tiempo según se prefiera). • Después de pasado el tiempo las electroválvulas se cerrarán y saldrá el cilindro E que empujará a la caja A y se recogerá de nuevo. • El cilindro D se recogerá hasta la posición intermedia • Saldrá el cilindro E que empujará a la caja B y se recogerá de nuevo. • El cilindro D se recogerá por completo • Saldrá el cilindro E que empujará a la caja C y se recogerá de nuevo. • Podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 18. Ejercicio 18 Se trata de regular el mezclado de varios líquidos. El esquema es el de la figura siguiente: Descripción del proceso: • Inicialmente las electroválvulas E1, E2, E3, E4 y E5 estarán cerradas y los tres depósitos vacíos. • Cuando se pulse el botón de inicio de la secuencia ocurrirán los siguientes pasos: • Las electroválvulas E1 y E2 se abrirán dejando que los tanque se llenen. Cuando en cada uno de los depósitos se active su sensor de llenado (S1 ó S3), se cerrará su correspondiente electroválvula. • Después de que se cierre cada electroválvula (o se active el correspondiente sensor de llenado) se activará la resistencia (R1 ó R2) que calentará el líquido que se encuentra en cada depósito. • Cuando se active el sensor de temperatura de cada depósito (se puede simular con un retardo a la conexión o a la desconexión) se abrirá la correspondiente válvula (E3 ó E4) que permitirá el vertido del líquido en el depósito mezclador a la vez que se apagan las resistencias. • Cuando se hayan activado los sensores de vaciado de ambos depósitos (S2 y S4) se cerrarán las electroválvulas (E3 y E4) y arrancará el motor de la mezcladora. • Después de un determinado tiempo se abrirá la electroválvula E5 dejando que salga la mezcla de ambos líquidos. • Cuando se active el sensor de vaciado (S5) se cerrará E5 y se apagará el motor de la mezcladora. • Podrá comenzar un nuevo ciclo. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 19. Ejercicio 19 Se trata de regular un cruce de calles y una vía férrea en diagonal por medio de semáforos. El esquema es el de la figura siguiente: Descripción del proceso: • Los semáforos se representarán por medio de cilindros con dos posiciones (rojo y verde) no contemplándose la posición de ámbar. No obstante el paso de verde a rojo se puede implementar con un retardo a la conexión/desconexión que identificaría al color ámbar. • El sistema no contemplará el tiempo. Todos los semáforos se activarán o desactivarán por medio de interruptores. Lo que habrá que controlar es que la activación de un determinado semáforo deberá anular a aquellos que puedan desencadenar un accidente. • Cuando se active el sensor de paso del tren (el cual siempre va en el mismo sentido) (Fc), y después de que pase un cierto tiempo (simulará la puesta en ámbar de todos los semáforos y se puede añadir una señal sonora) se pondrán todos los semáforos en rojo salvo los correspondientes a los pasos de peatones y los giros a derecha de los carriles correspondientes. • Los semáforos de los pasos de peatones se encenderán todos a la vez y no deberá permitirse el paso de ningún vehículo salvo los de giro a la derecha. • La lógica de la regulación será la implementada según preferencias propias y se deberá indicar en la memoria. • Existirá un mecanismo que permita la paralización de todo el sistema desde un único punto (seta de emergencia)
- 20. Condiciones generales para todos los ejercicios: • Se puede modificar la estructura, disposición y tipo de cilindros o los ciclos de funcionamiento siempre que éstos sean lógicos y se representen por el diseño realizado. Ello quiere decir que si no se consigue diseñar el circuito tal y como se indica en el enunciado, se pueden proponer variantes lógicas. • Se podrán añadir sensores que incrementen la seguridad del diseño. • Todos los circuitos deberán disponer de un procedimiento de parada en caso de emergencia • Hay que presentar una pequeña memoria (un par de folios por las dos caras a lo sumo o menos si con ello basta) que describa el funcionamiento del diseño realizado, identificando los elementos del mismo por un nombre o código. • Si no se logra el objetivo, se valorará la parte del trabajo realizado y los supuestos que se hayan considerado. Dicho de otra manera, la no realización del trabajo no significará un 0 en la calificación. • Se valorará tanto la dificultad del diseño como las variantes que se realicen sobre el diseño propuesto, siempre que las mismas estén razonadas. Hay diseños que están realizados ya entre los “ejercicios modelo” subidos a Studium, por lo que dichos ejercicios tendrán la nota mínima. • En los esquemas se valorará su mejora mediante la inserción de señales luminosas y/o sonoras que aporten o resalten algún tipo de estado o de información. • En muchas ocasiones podemos simular activación y desactivación de señales por medio de cilindros en los que detectamos las posiciones extremas y/o intermedias. • Por ejemplo: • Si queremos simular un pesaje en el que haya que alcanzar diferentes niveles, lo podemos simular como el cilindro que soporta la bandeja de pesaje, al que le hayamos colocado detectores para distintas posiciones. Cuando el cilindro vaya alcanzando las diferentes posiciones, será lo mismo que si se hubiesen alcanzado las diferentes pesadas. • Si queremos simular el llenado (o los diferentes niveles de llenado) de un tanque, podemos simularlo con un cilindro que alcance diferentes posiciones detectadas por medio de sensores inductivos.