Descargado 66 veces




















![22 An´alisis est´atico de estructuras por el m´etodo matricial
de estructuras no obtendremos m´as informaci´on que la relativa a los gdl
que entran en el modelado discreto, por lo que si queremos conocer los
esfuerzos a lo largo de cada elemento de la estructura debemos buscar
informaci´on en otras materias (p.ej. resistencia de materiales).
1.6. Caracter´ısticas de la matriz de rigidez
Antes de finalizar este cap´ıtulo introductorio conviene resumir aqu´ı al-gunas
de las principales caracter´ısticas de las matrices de rigidez K:
La matriz de rigidez es una propiedad del sistema estructural, no
cambia en funci´on del estado de cargas o de condiciones de con-torno
a que se someta al estructura. S´olo se ver´a afectada si se
introduce alg´un elemento adicional.
Cada columna representa las acciones necesarias para conseguir
un desplazamiento unitario en el grado de libertad definido por el
´ındice de la columna a la vez que se quedan fijados a cero el resto
de los gdl.
Una fila es un conjunto de multiplicadores que operados sobre el
vector desplazamiento completo proporcionan el valor de la fuerza
correspondiente al gdl definido por el ´ındice de la fila.
Cada t´ermino kij se puede considerar una “funci´on de peso” que
representa la proporci´on de contribuci´on a la fuerza del gdl i de-bido
al desplazamiento del gdl j. En caso de que su valor sea cero
significa que ambos gdl no est´a relacionados.
1.7. Rotaciones entre sistemas de coordenadas
Antes de abordar el c´alculo matricial, es conveniente repasar el con-cepto
del cambio de coordenadas de un vector en el plano, una operaci´on
omnipresente en cap´ıtulos posteriores. Consideremos un punto P (o el
vector desde el origen a dicho punto P), cuyas coordenadas en un sis-tema
de referencia global son P = [px py]⊤. Si en lugar de tener dichas](https://image.slidesharecdn.com/blanco2012calculomatricialestructuras-141020202428-conversion-gate02/85/Blanco2012calculo-matricial-estructuras-24-320.jpg)
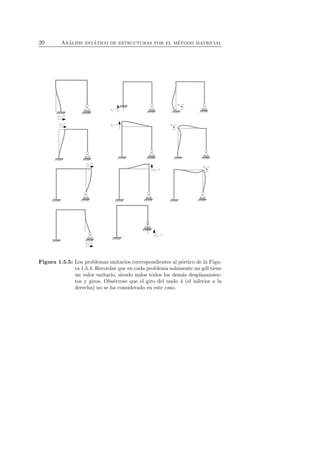
![Cap´ıtulo 1. Introducci´on al c´alculo matricial 23
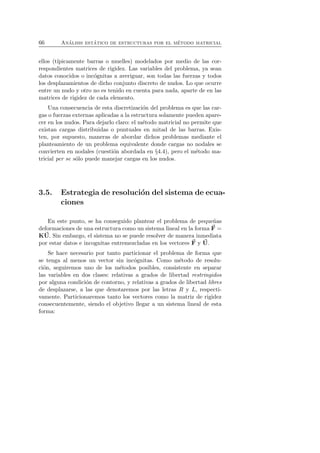
coordenadas las tuvieramos en un sistema que est´e girado un ´angulo φ
con respecto al de referencia siguiendo unos nuevos ejes x′ e y′, el mis-mo
punto (o vector) tendr´ıa entonces unas coordenadas locales a dicho
sistema que denotamos como P′ = [p′x p′y]⊤ como se ve en la siguiente
figura:
Figura 1.7.1: Un punto P tiene un par de coordenadas en cada sistema de
referencia (x, y) y (x′, y′).
La relaci´on entre ambos pares de coordenadas se puede establecer
f´acilmente mediante relaciones trigonom´etricas y conocido ´unicamente el
giro φ (con signo positivo en la direcci´on contraria a las agujas del reloj,
como se muestra en la figura). Respecto a la coordenada x en el sistema
global (px), se puede ver en la Figura 1.7.2(a) como ´este se obtiene
restando los dos segmentos se˜nalados, mientras que la componente en y
global (py) est´a compuesta de la suma de los dos segmentos remarcados
en la Figura 1.7.2(b):
Es decir, las coordenadas globales son:
px = p′x cos φ − p′y sin φ
py = p′x sin φ + p′y cos φ
lo que no es m´as que una combinaci´on lineal de las coordenadas locales.
Una forma m´as compacta y pr´actica de representar dicho cambio de
coordenadas es en forma matricial, de forma que queda:](https://image.slidesharecdn.com/blanco2012calculomatricialestructuras-141020202428-conversion-gate02/85/Blanco2012calculo-matricial-estructuras-25-320.jpg)


























































































































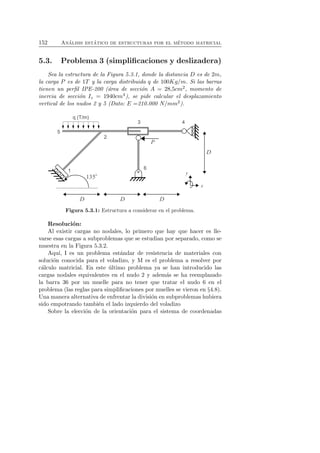














Este documento presenta el análisis estático de estructuras mediante el método matricial. Introduce los conceptos básicos del cálculo matricial y sus características, como la generalidad y la posibilidad de automatización. Explica cómo modelizar el problema mediante matrices y describe los métodos de cálculo matricial. A continuación, analiza las características de la matriz de rigidez y las rotaciones entre sistemas de coordenadas.
















![Estruc dinam[1]](https://cdn.slidesharecdn.com/ss_thumbnails/estrucdinam1-120823233034-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)













































![Clase 19 20-21-22-23-24 pav rigidos[resumen] (1)](https://cdn.slidesharecdn.com/ss_thumbnails/clase19-20-21-22-23-24pavrigidosresumen1-141119173345-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)