Descargado 210 veces


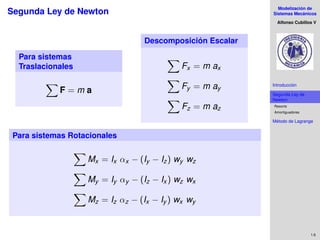

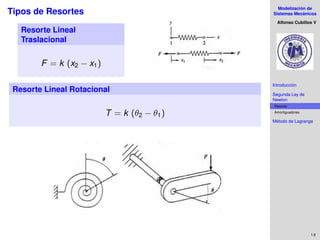

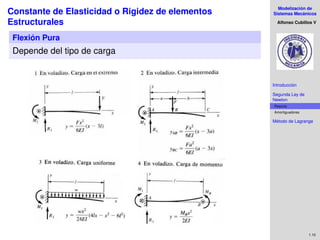
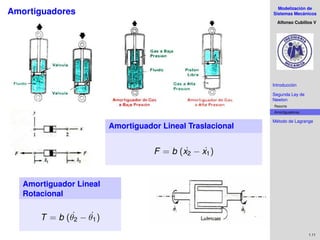
El documento trata sobre la modelización de sistemas mecánicos usando ecuaciones diferenciales. Explica conceptos como la segunda ley de Newton, resortes, amortiguadores y el método de Lagrange para modelar sistemas mecánicos simples y mixtos mediante ecuaciones diferenciales. Además, analiza tipos de ecuaciones diferenciales y métodos para solucionarlas en la modelización de sistemas.
































![Vibraciones unidad 1 c [autoguardado]](https://cdn.slidesharecdn.com/ss_thumbnails/vibracionesunidad1cautoguardado-160130180638-thumbnail.jpg?width=640&height=640&fit=bounds)























