Descargar para leer sin conexión
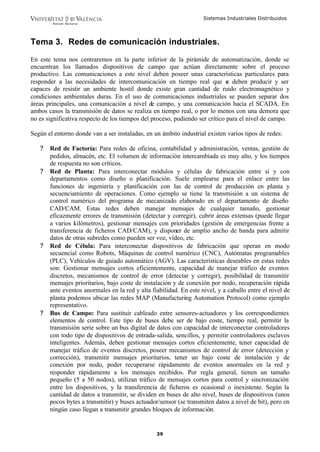



















Este documento describe diferentes tipos de redes de comunicación industriales. Explica que las redes de campo deben resistir ambientes hostiles y transmitir datos en tiempo real. Luego describe varios tipos de redes industriales como redes de factoría, planta, célula y campo. Finalmente, se centra en describir dos sistemas de comunicación comunes a nivel de célula y campo: el bus ASi y los buses CAN y LONworks orientados a dispositivos.







































![Tarea bus de_campo[1]](https://cdn.slidesharecdn.com/ss_thumbnails/tareabusdecampo1-101021131006-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





















































