Este documento presenta información sobre máquinas asincrónicas. Explica los aspectos constructivos y el principio de funcionamiento de los motores de inducción, incluyendo detalles sobre el devanado del estator y del rotor. También describe la teoría del motor de rotor devanado, sus características de operación y métodos de control y arranque, como el partidor estrella-triángulo y el uso de resistencias adicionales en el rotor. Se incluyen diagramas y gráficas para ilustrar los diferentes conceptos.



![CAPÍTULO 7 MÁQUINAS ASINCRÓNICAS
SISTEMAS ELECTROMECÁNICOS Pág 125
7.3.3)Comportamiento de las variables eléctricas.
Fig.7.17.: Comportamiento de las variables eléctricas en un motor de inducción de 220[V]
3φ, 60 [Hz], 10 kW, Tnom=52,4[Nm].
7.3.4)Clases de motores.
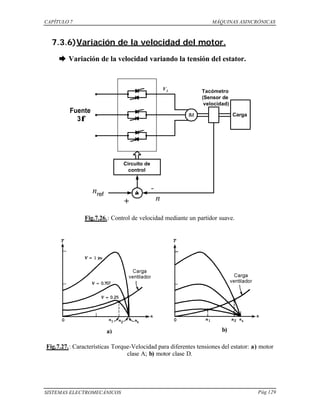
Fig.7.18.: Curvas torque-velocidad típicas para las diferentes clases de motores.(A-B-C-D).](https://image.slidesharecdn.com/capitulo7sistemaselectromecanicos-130711071643-phpapp02/85/Capitulo7-sistemas-electromecanicos-10-320.jpg)



![CAPÍTULO 7 MÁQUINAS ASINCRÓNICAS
SISTEMAS ELECTROMECÁNICOS Pág 131
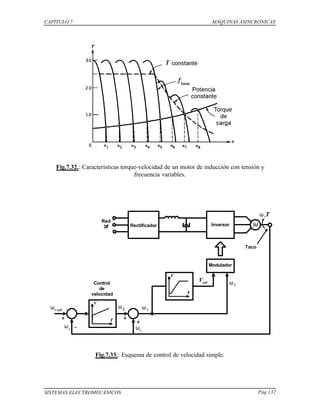
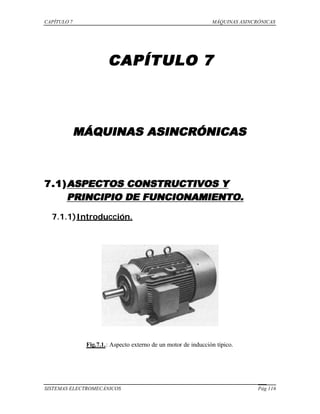
Fig.7.30.: Tensión de frecuencia variable generada por un inversor con control PWM
(Pulse Width Modulation): a) f=60 [Hz] y VL-L fund=120[V]; b) f=30 [Hz] y VL-L
fund=120[V].
Fig.7.31.: Tensión de frecuencia variable generada por un inversor con control PWM: a)
f=60 [Hz] y VL-L fund=120[V]; b) f=60 [Hz] y VL-L fund=60[V].
a)
b)
a)
b)](https://image.slidesharecdn.com/capitulo7sistemaselectromecanicos-130711071643-phpapp02/85/Capitulo7-sistemas-electromecanicos-16-320.jpg)