Descargar para leer sin conexión

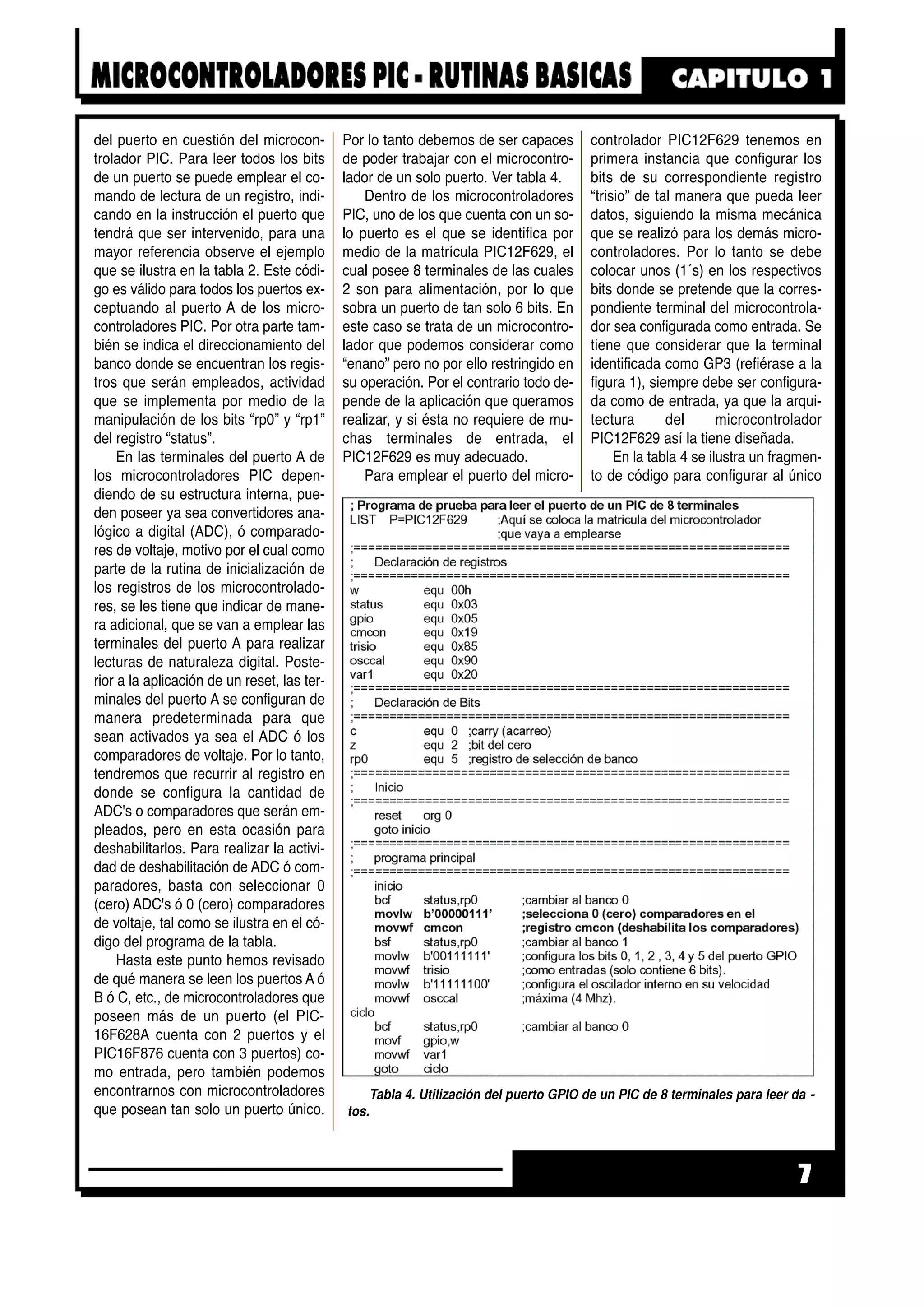
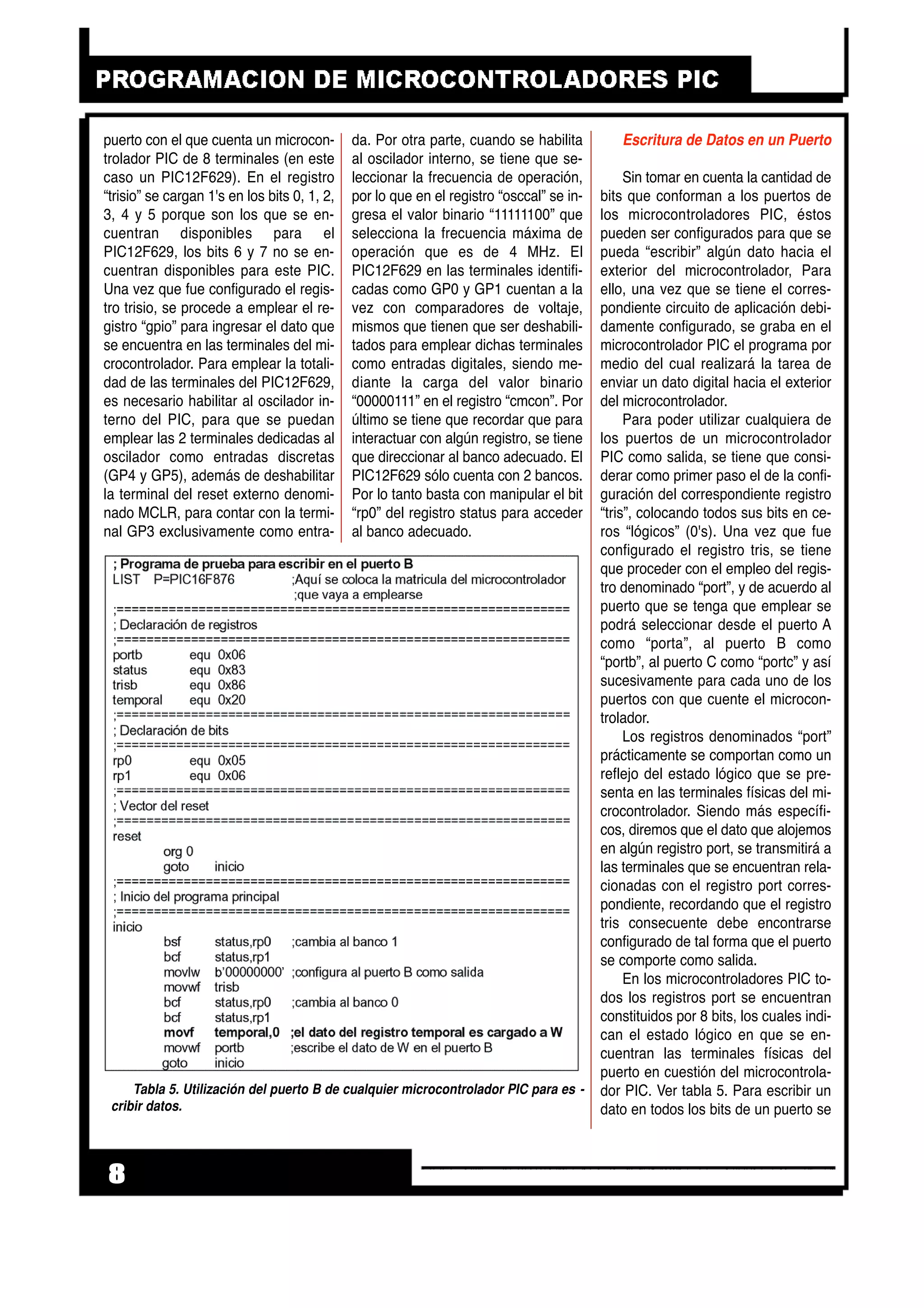
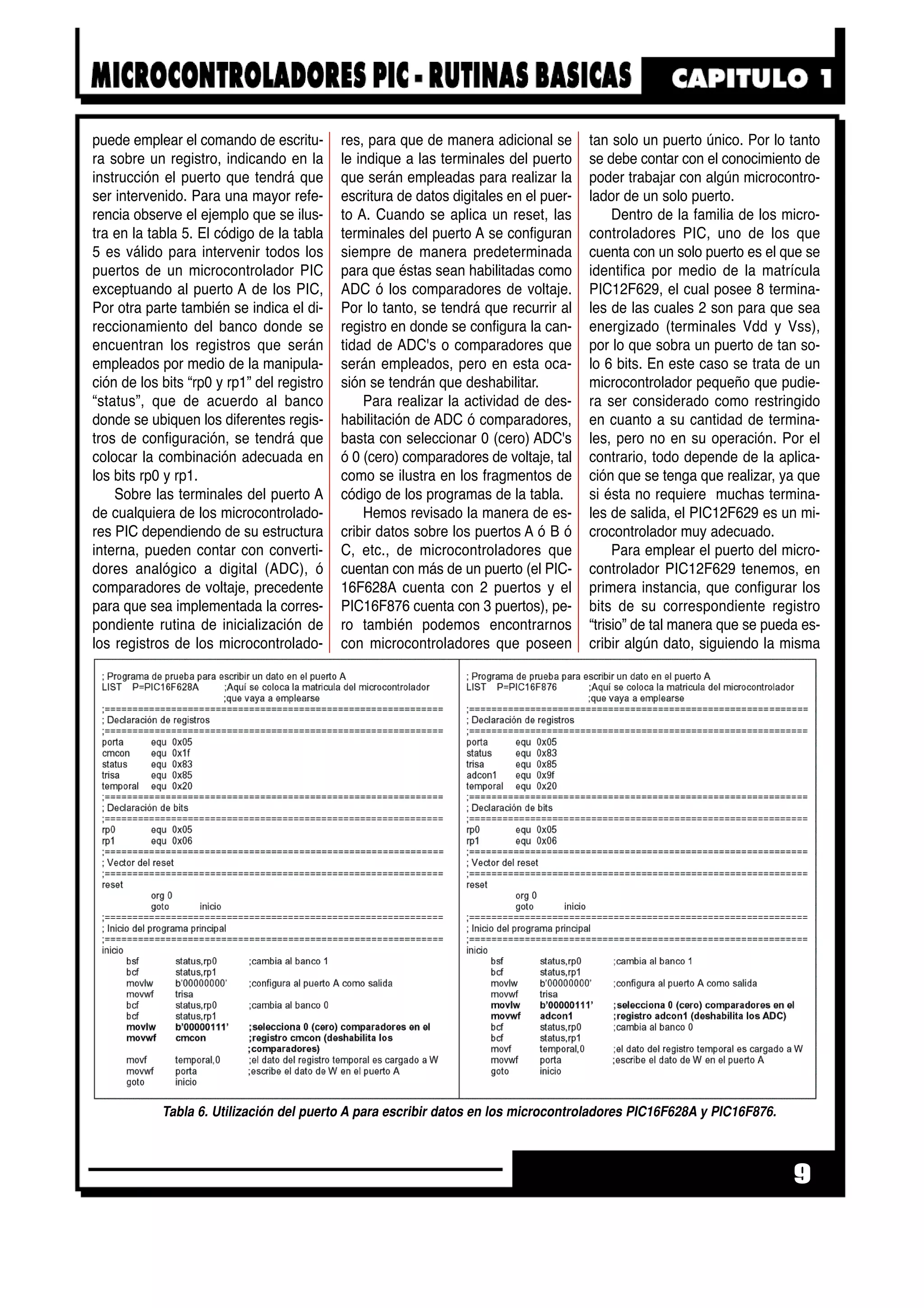
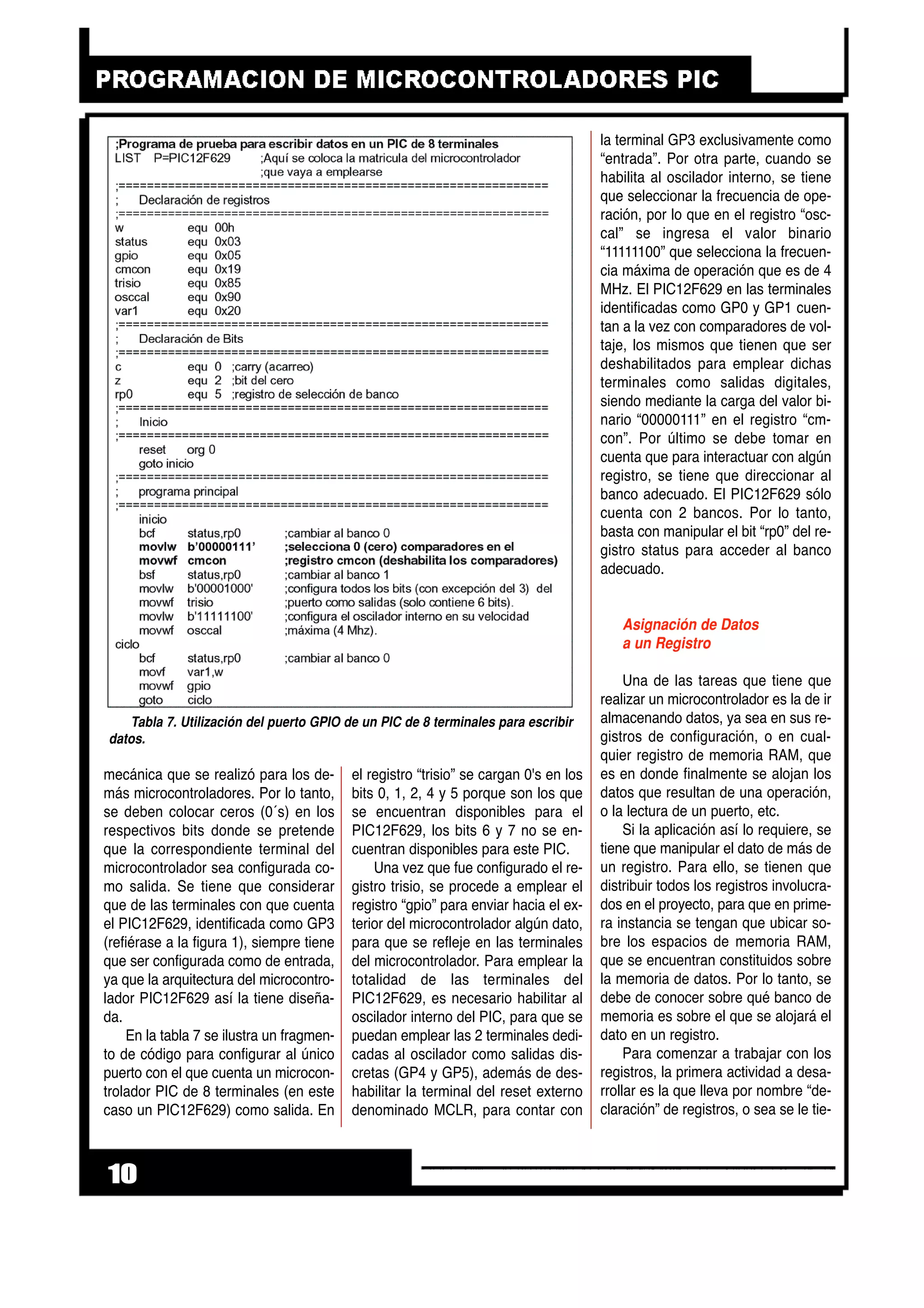
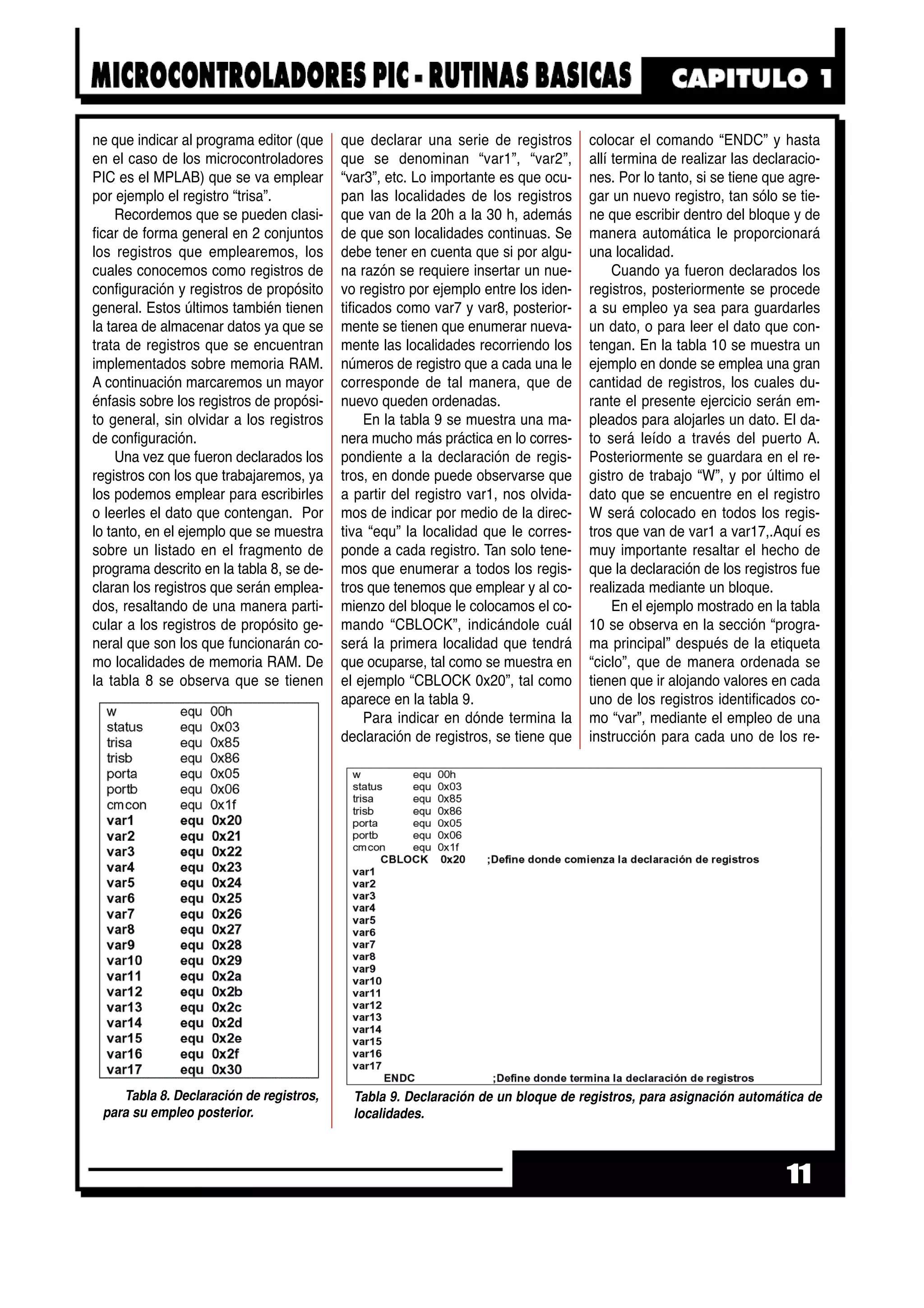
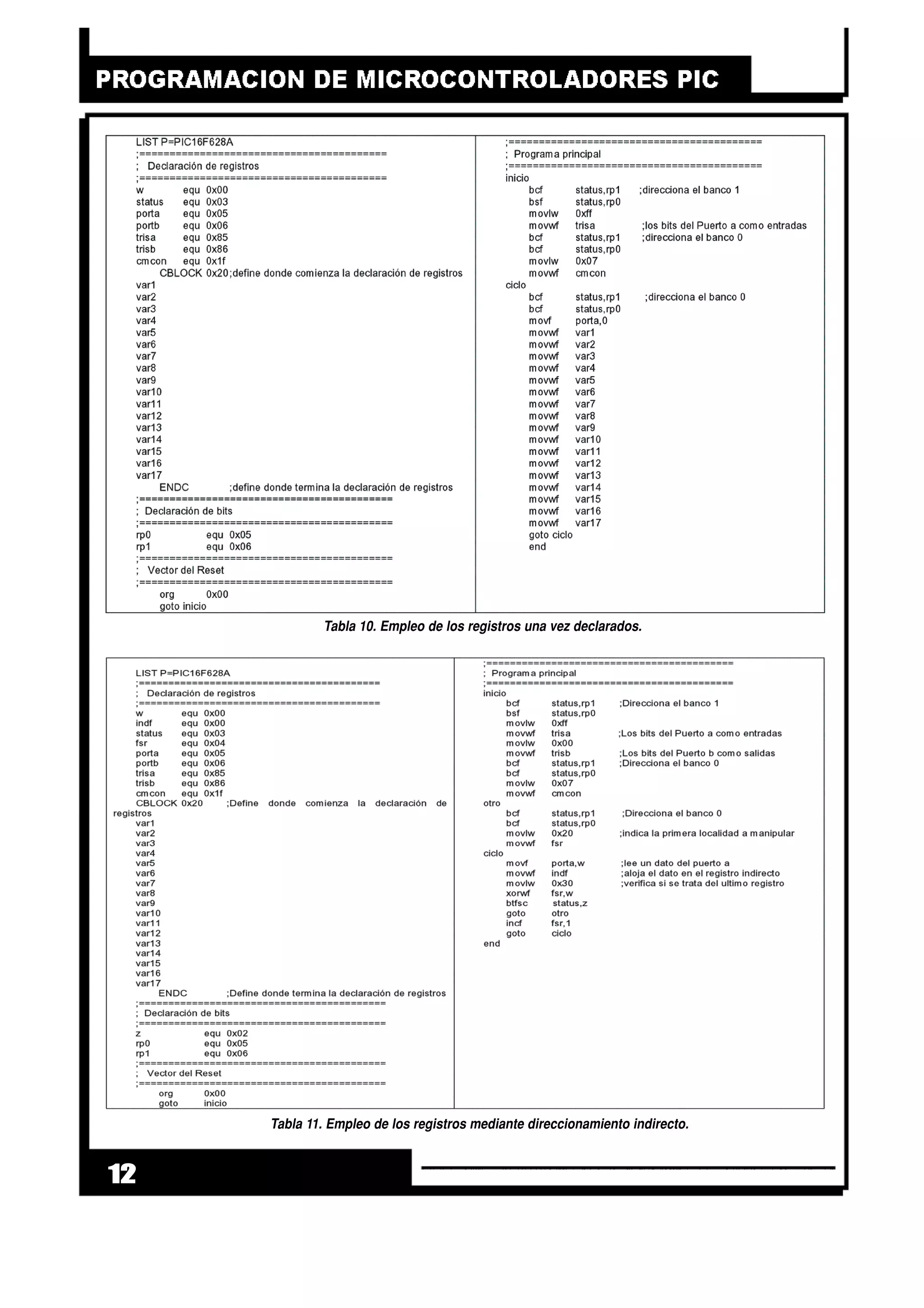
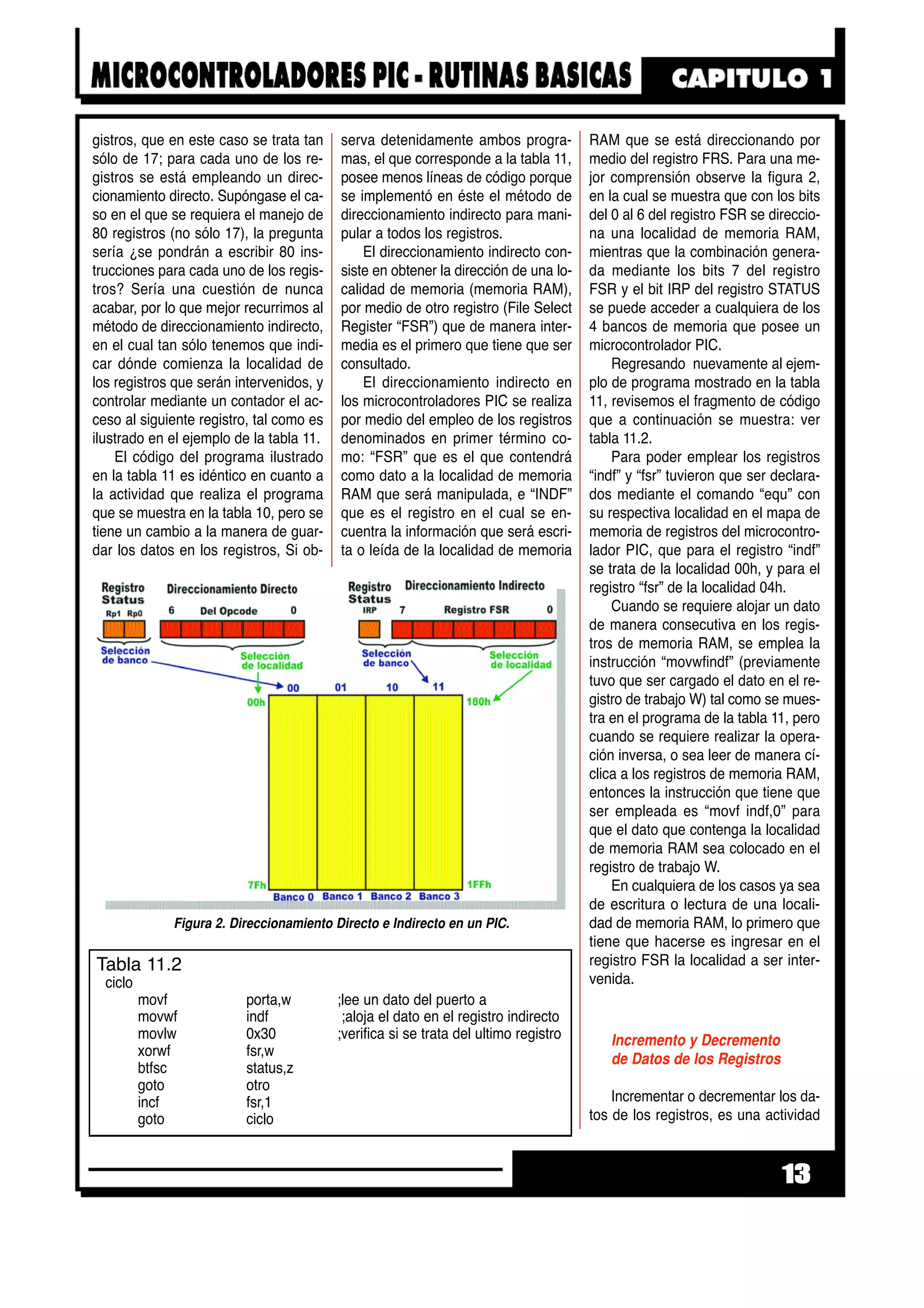
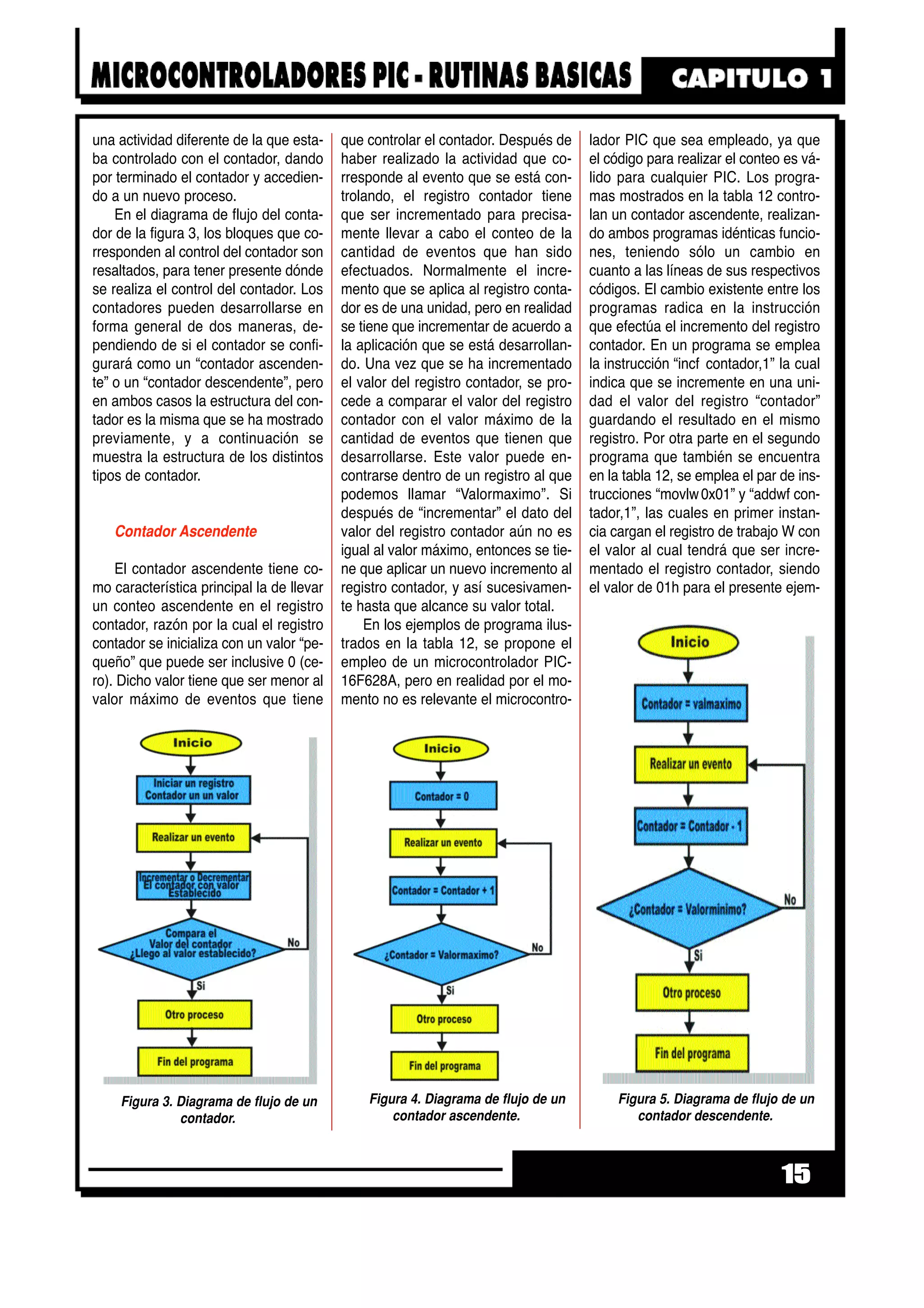
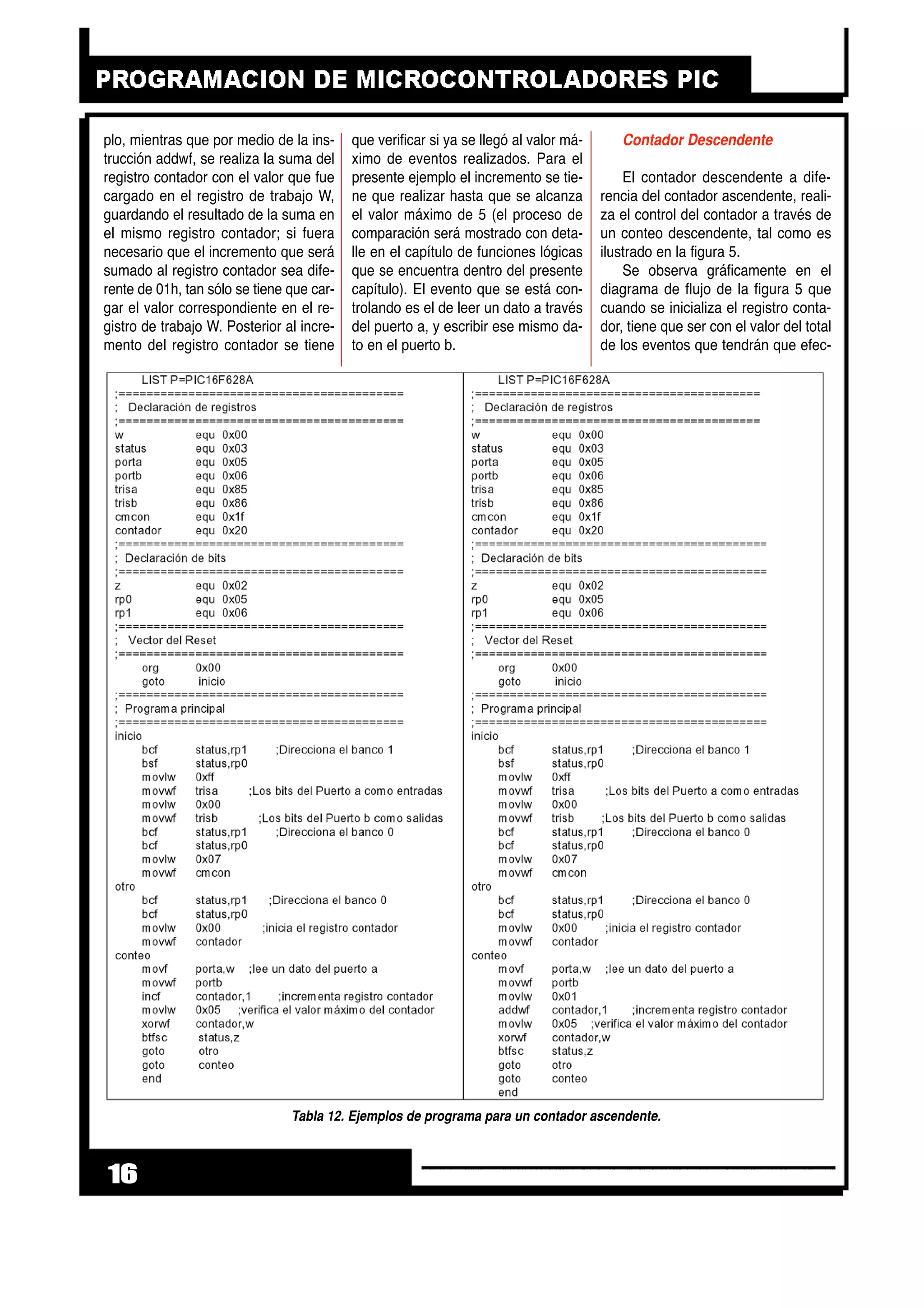
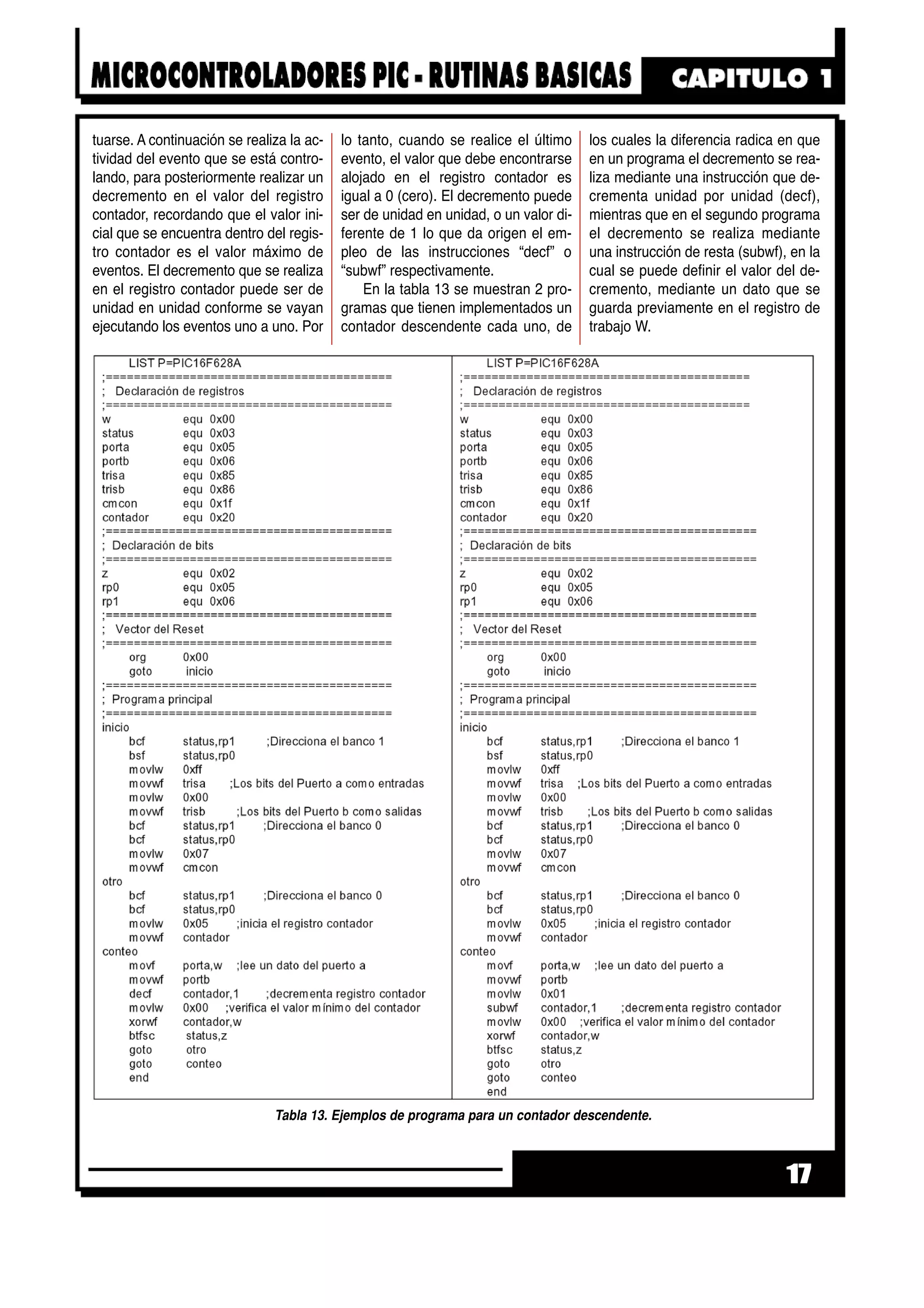
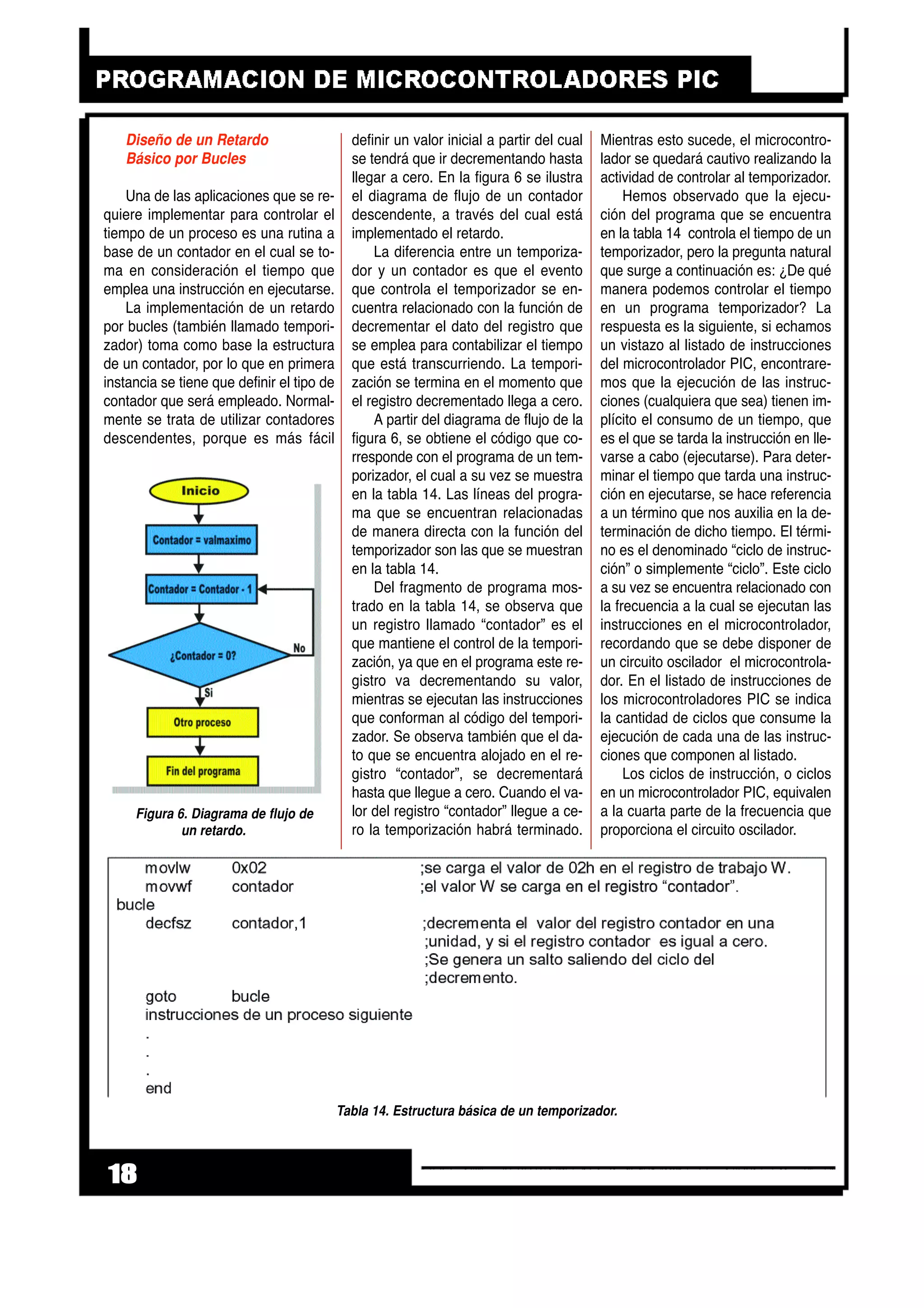
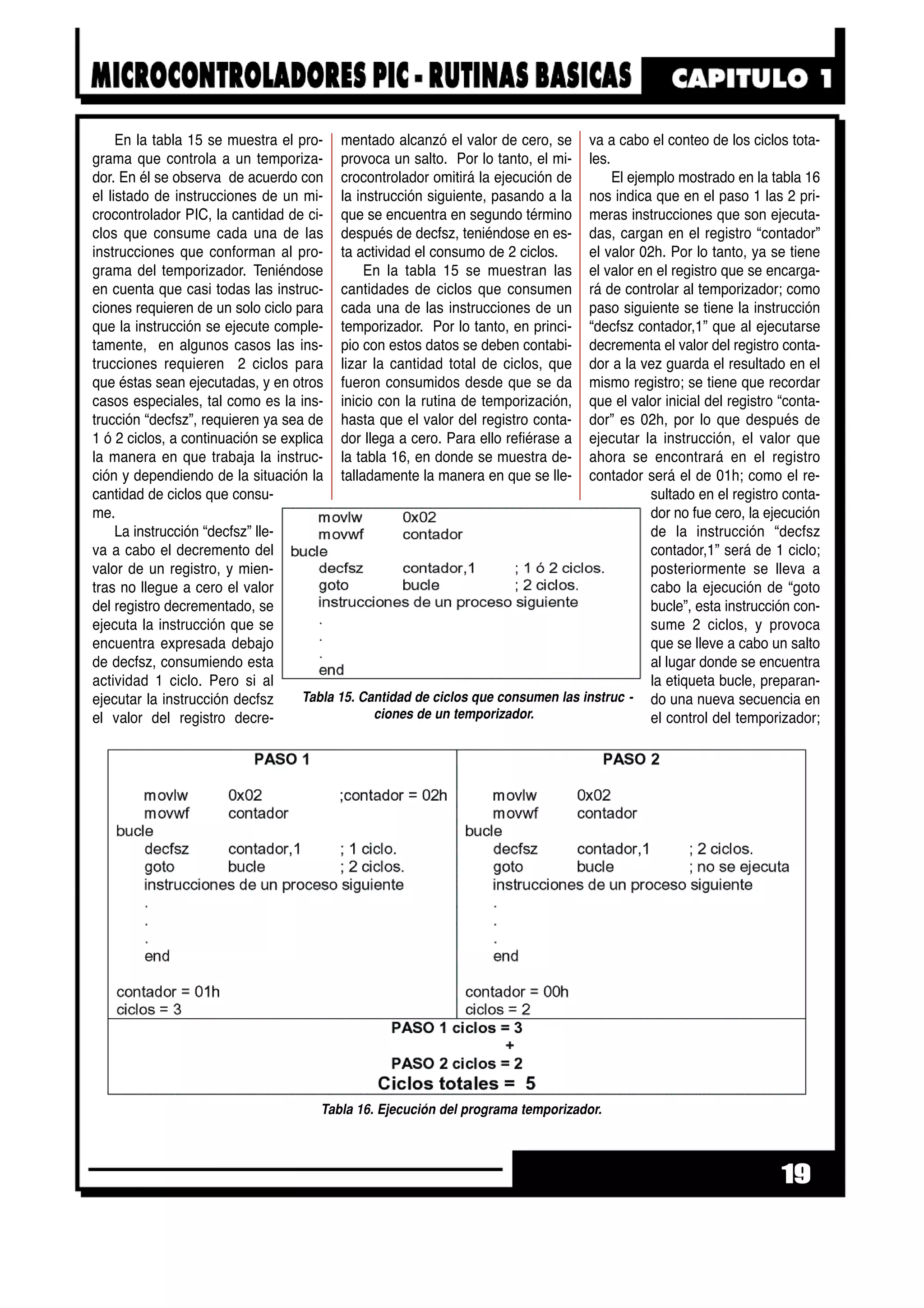
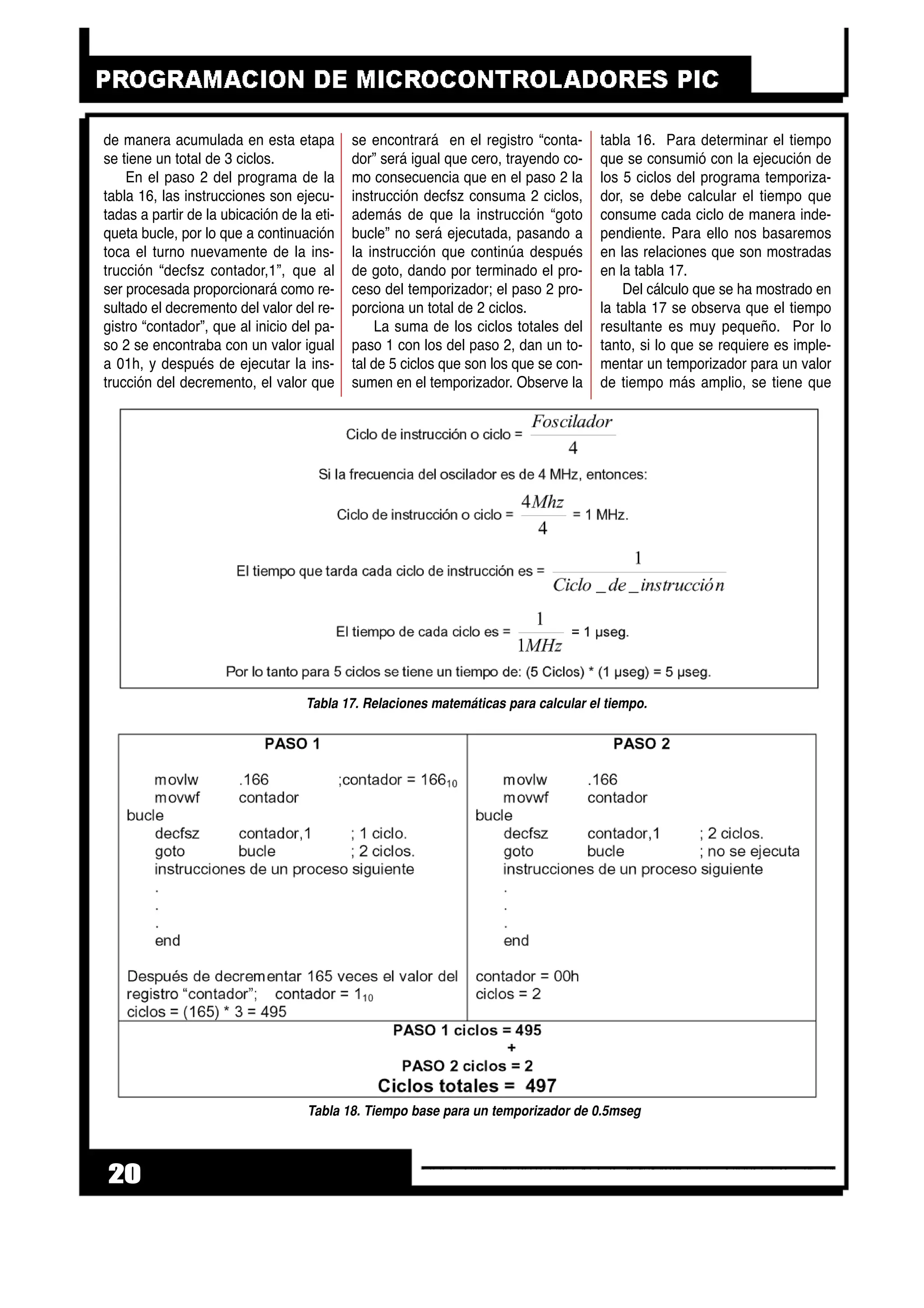
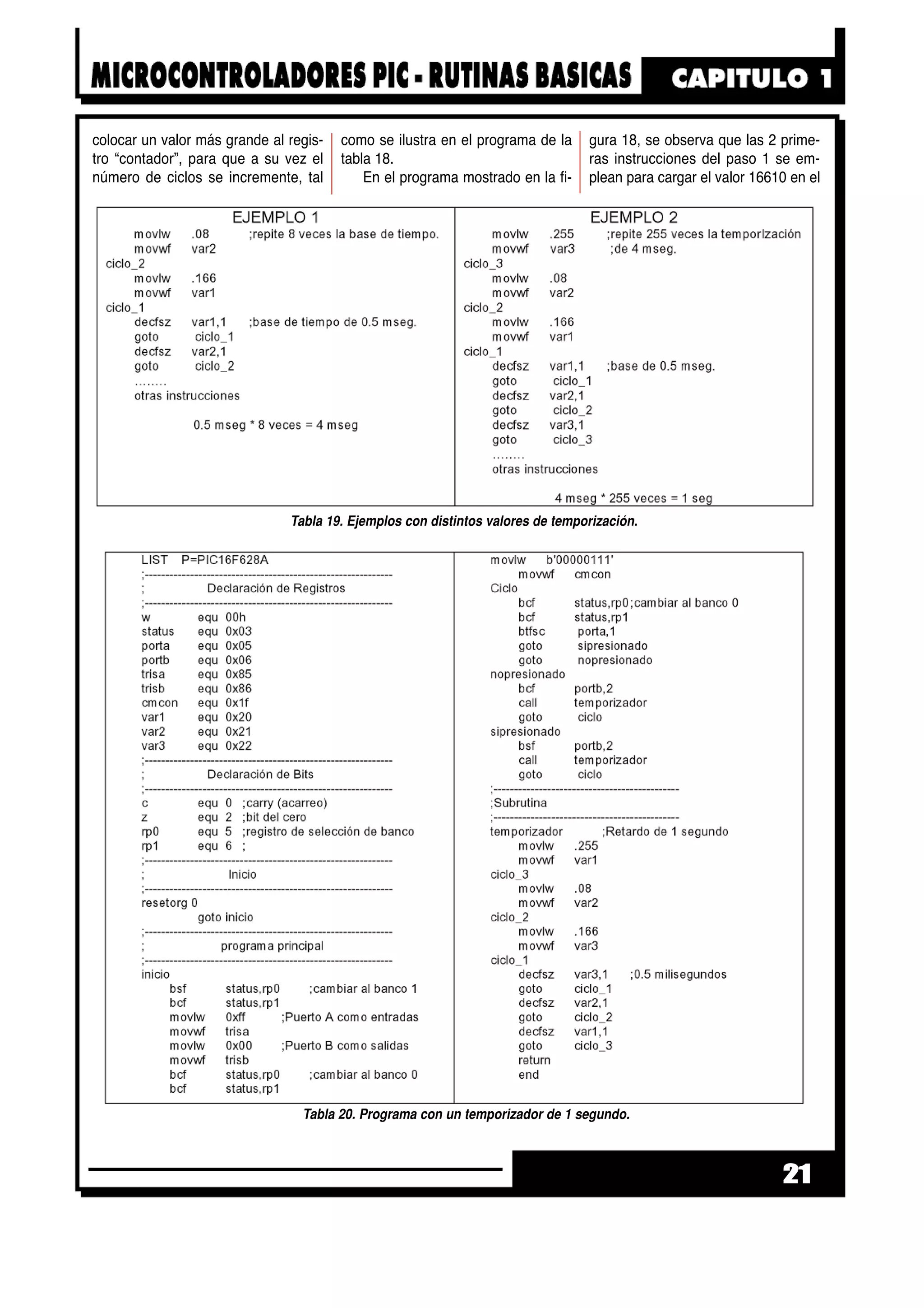
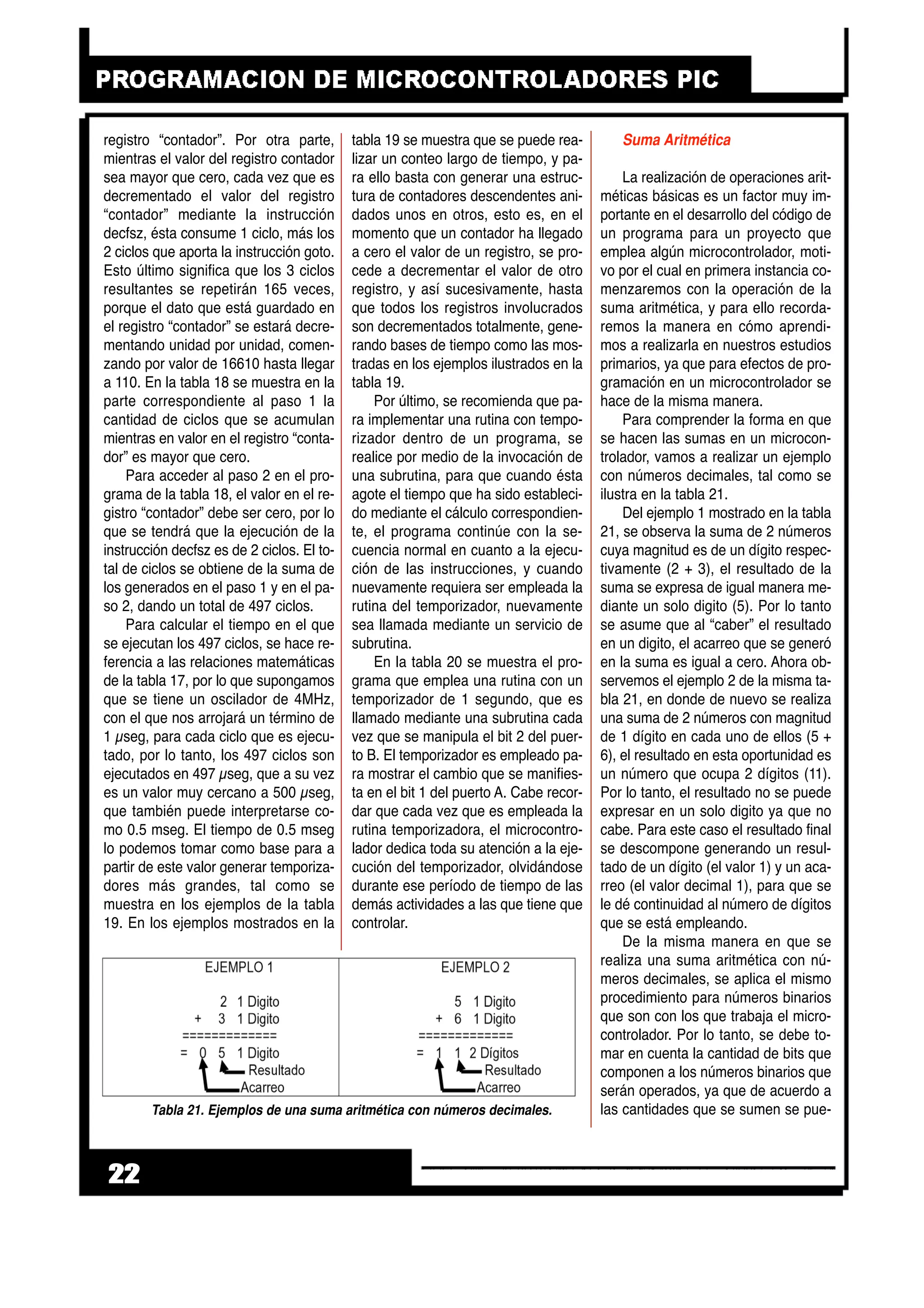
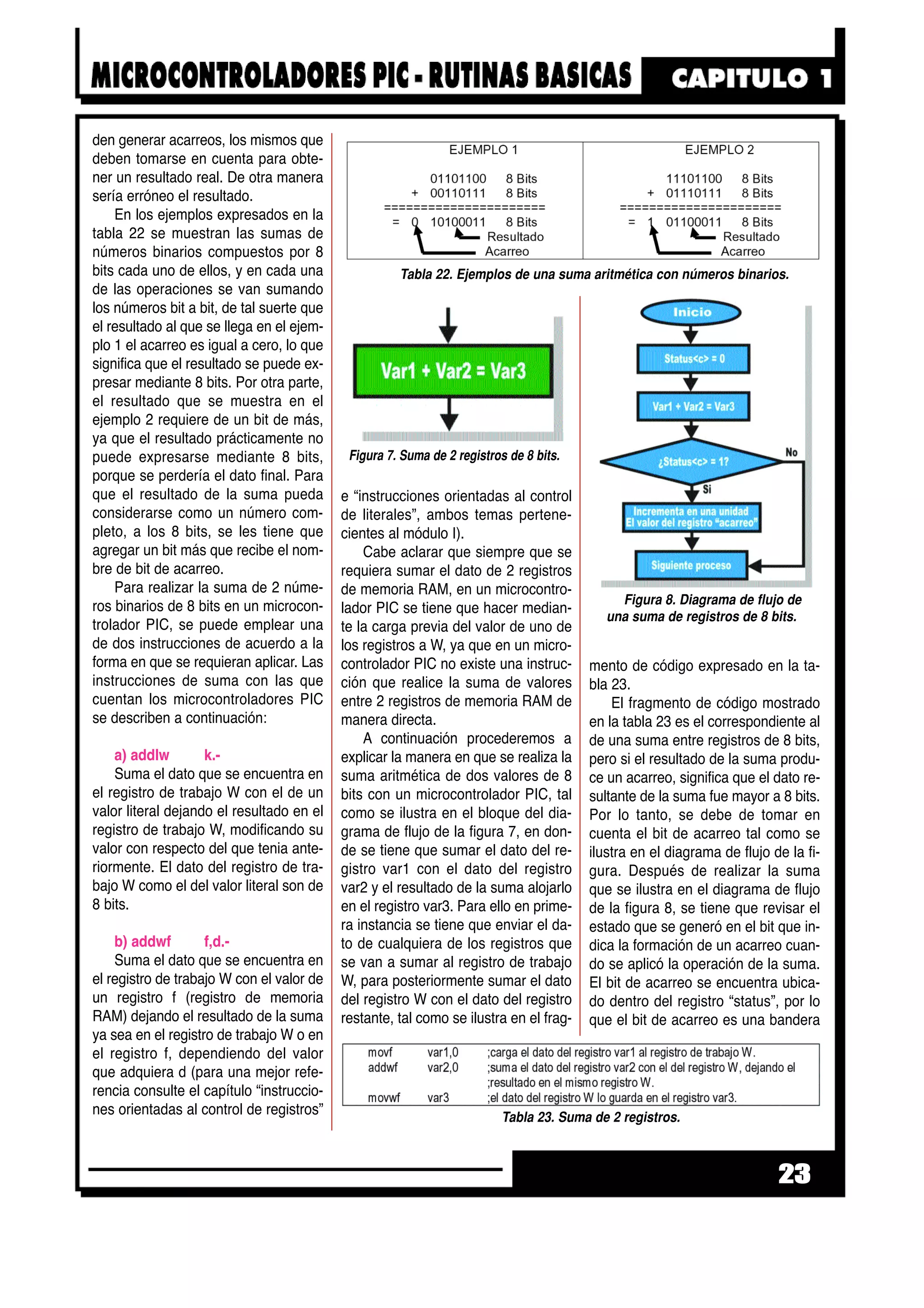
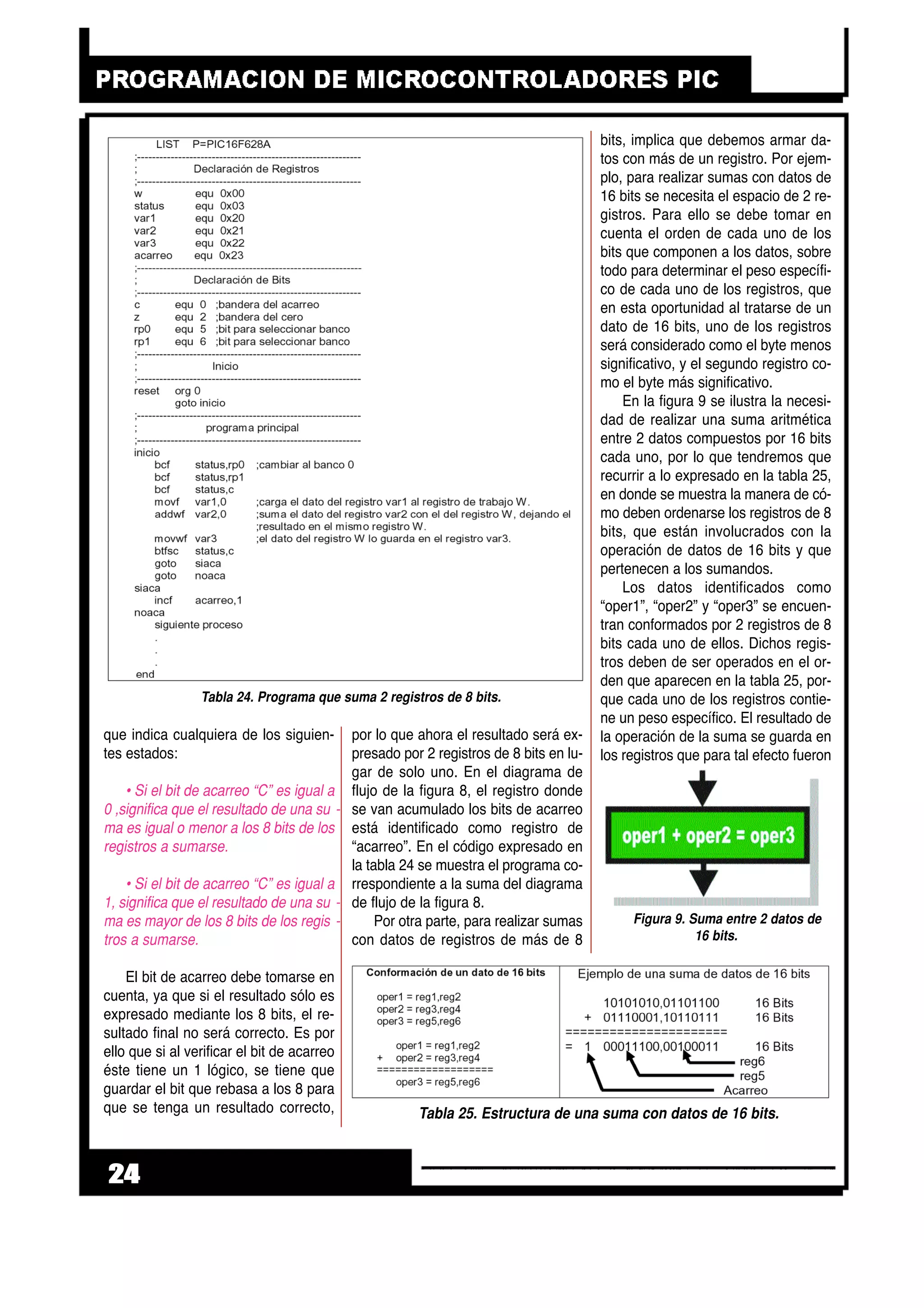
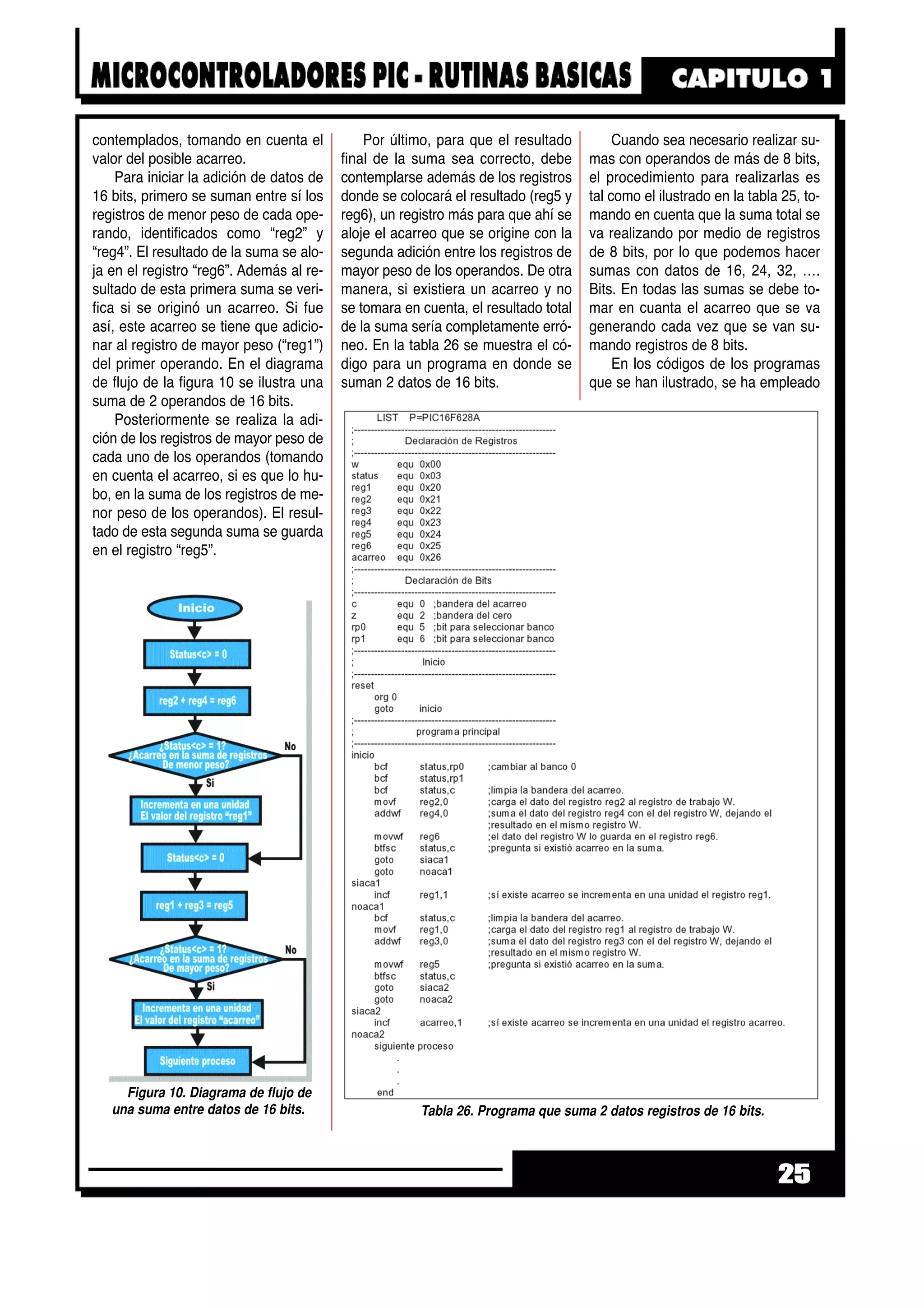
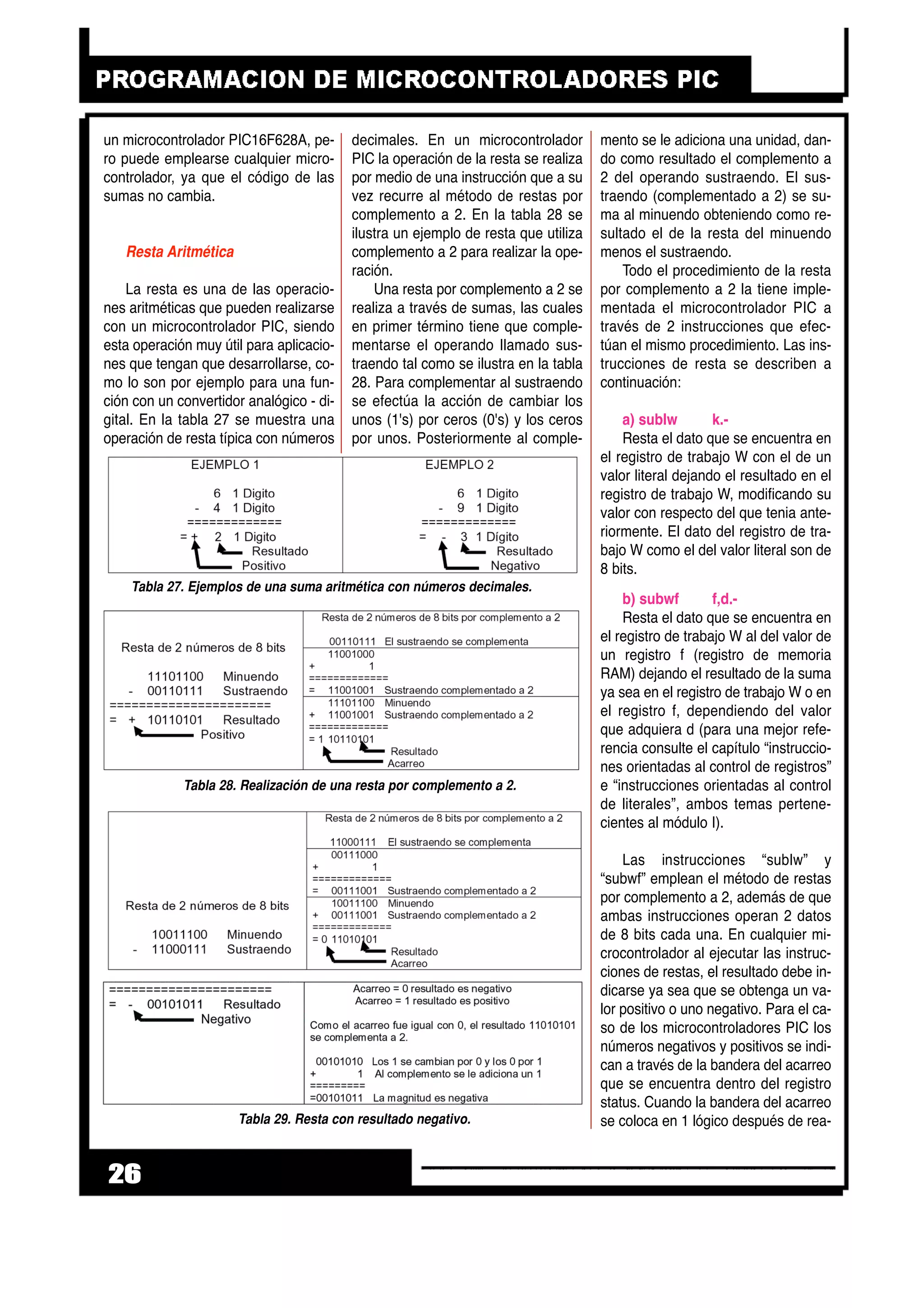
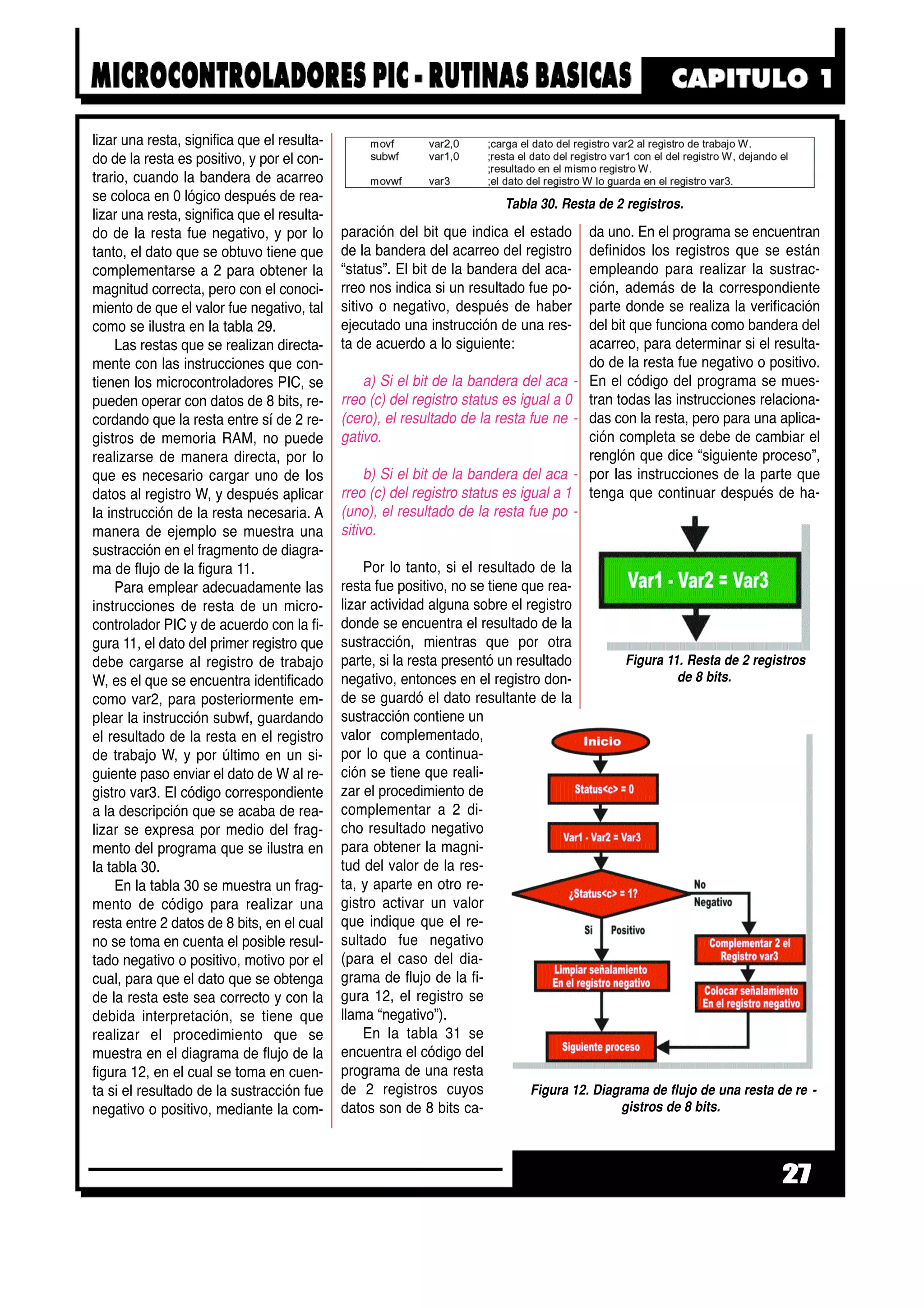
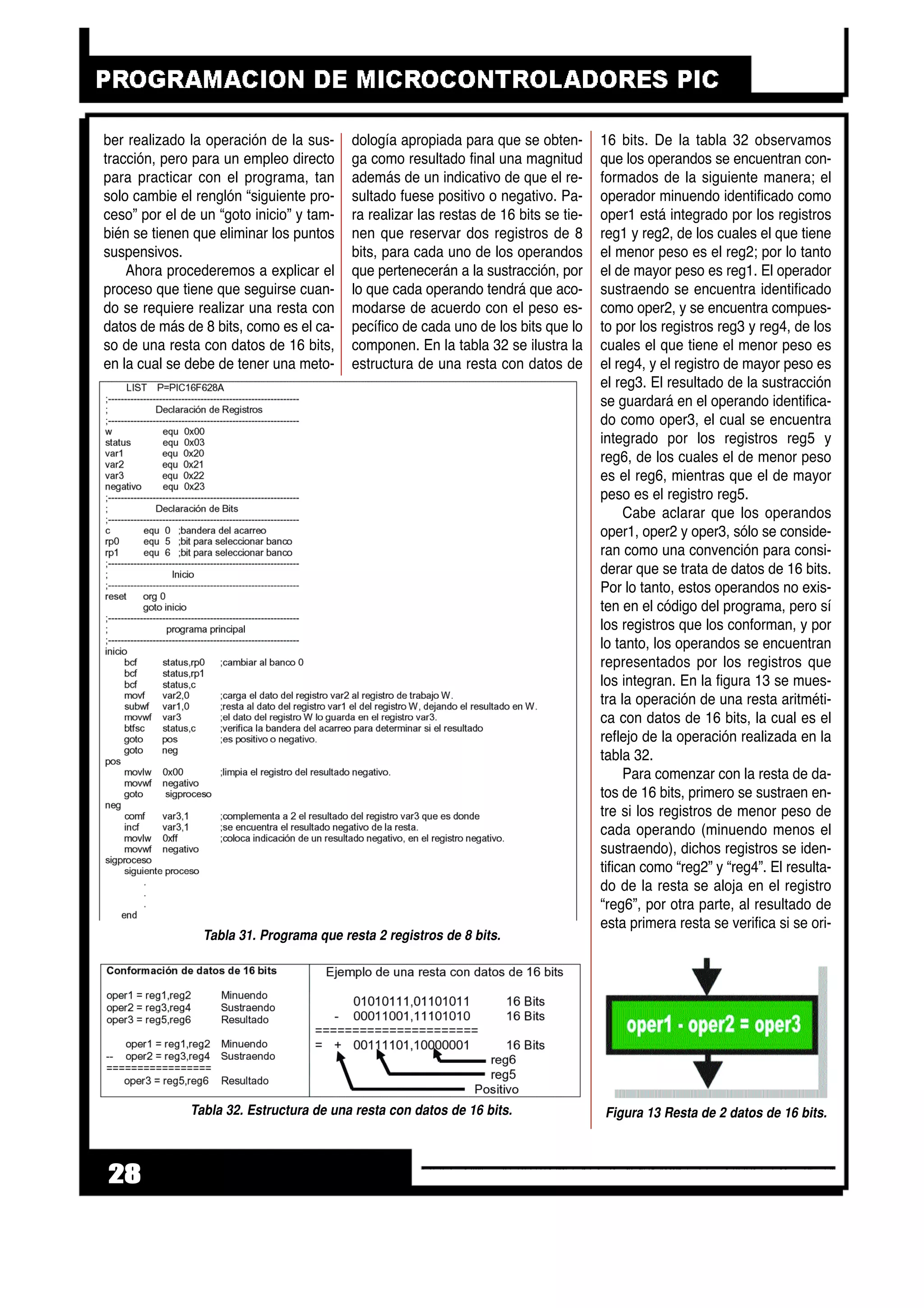
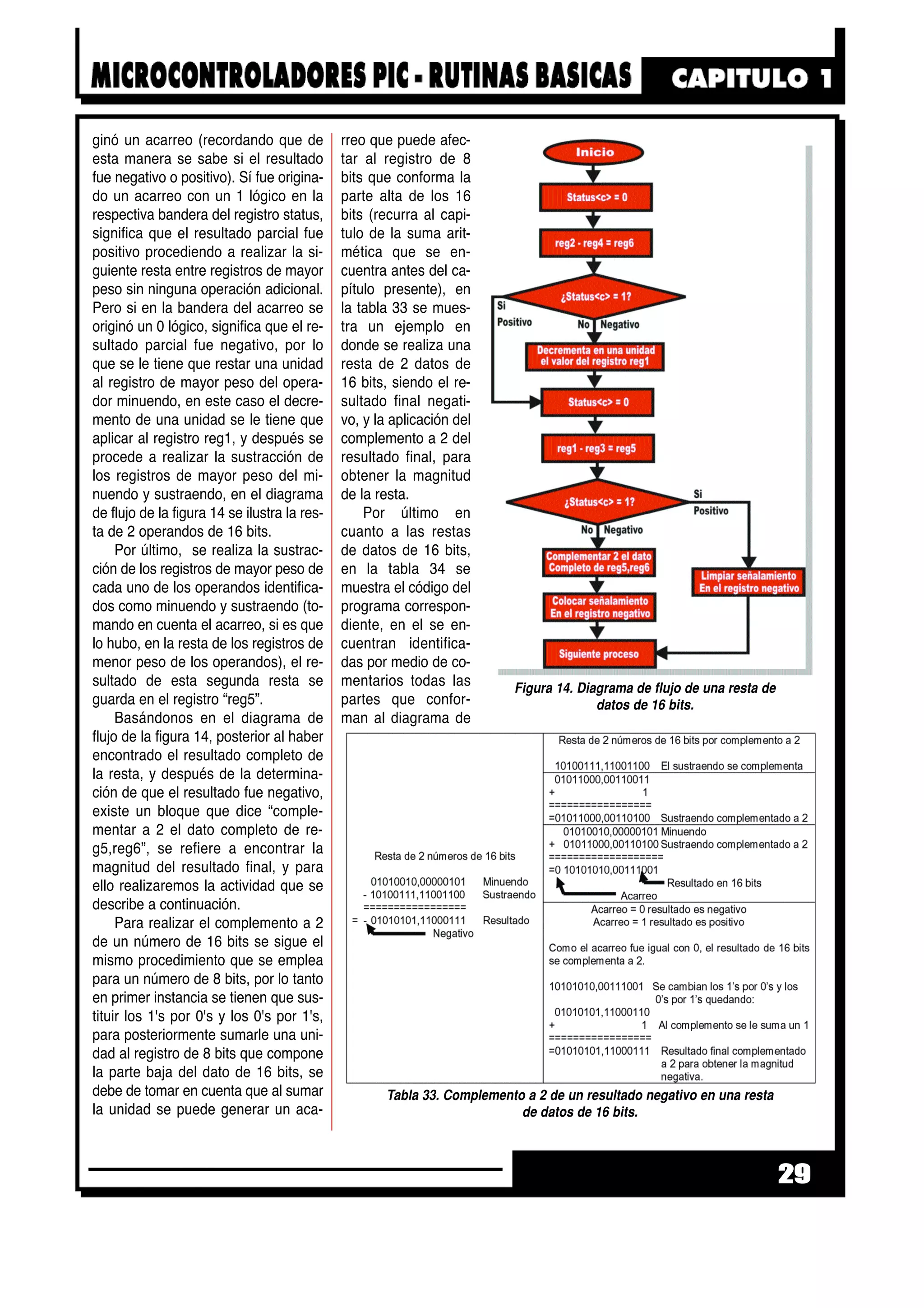
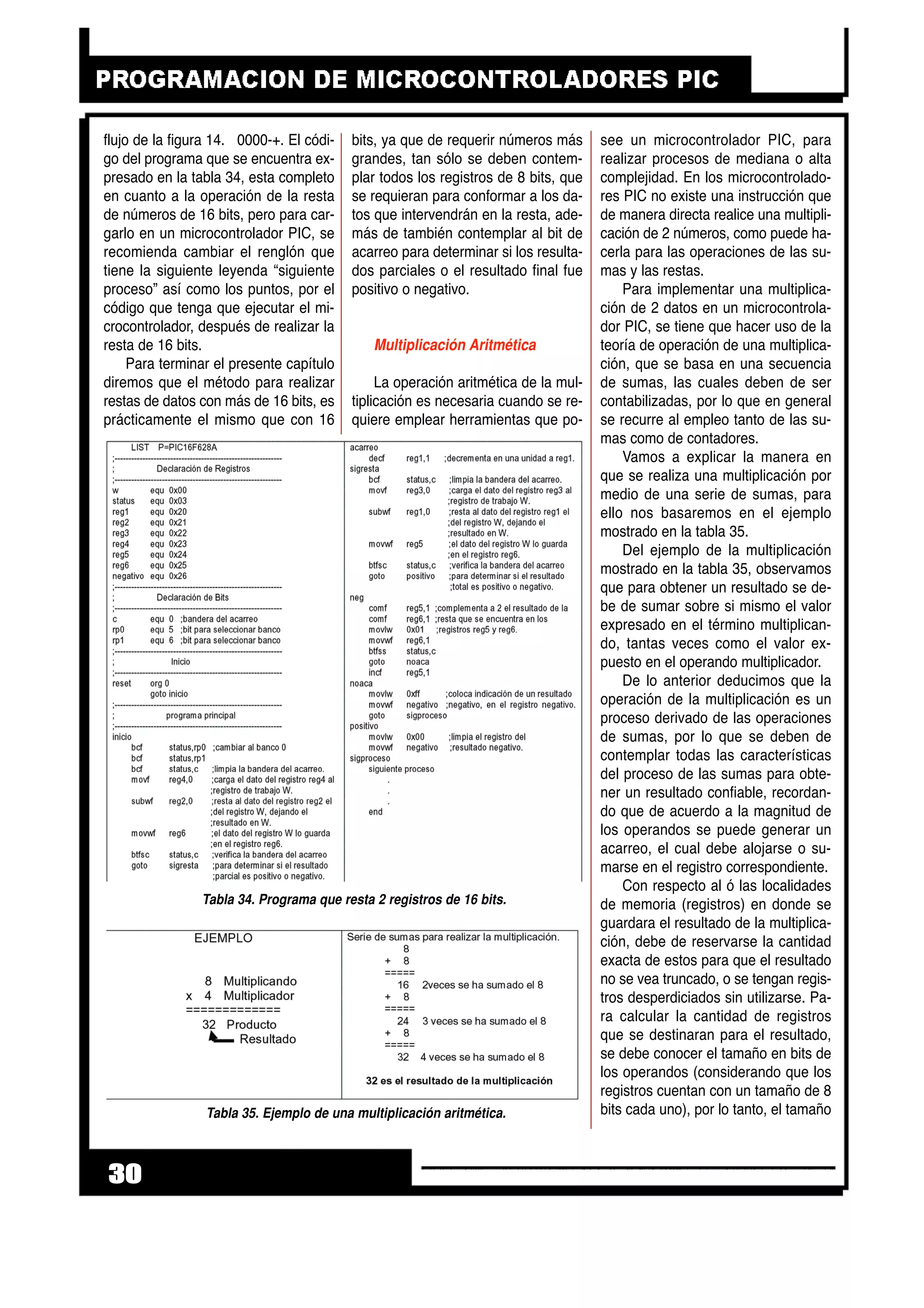
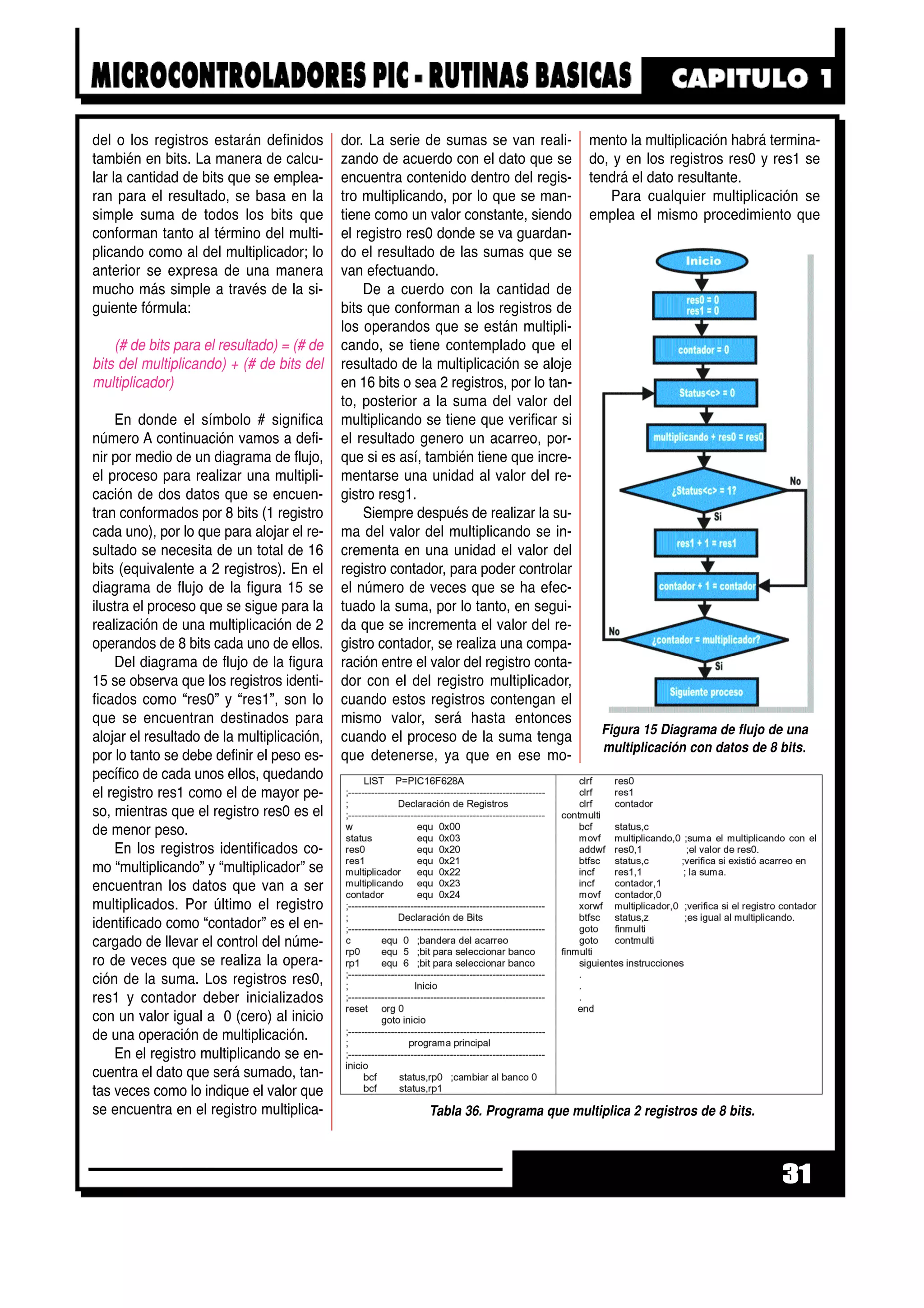
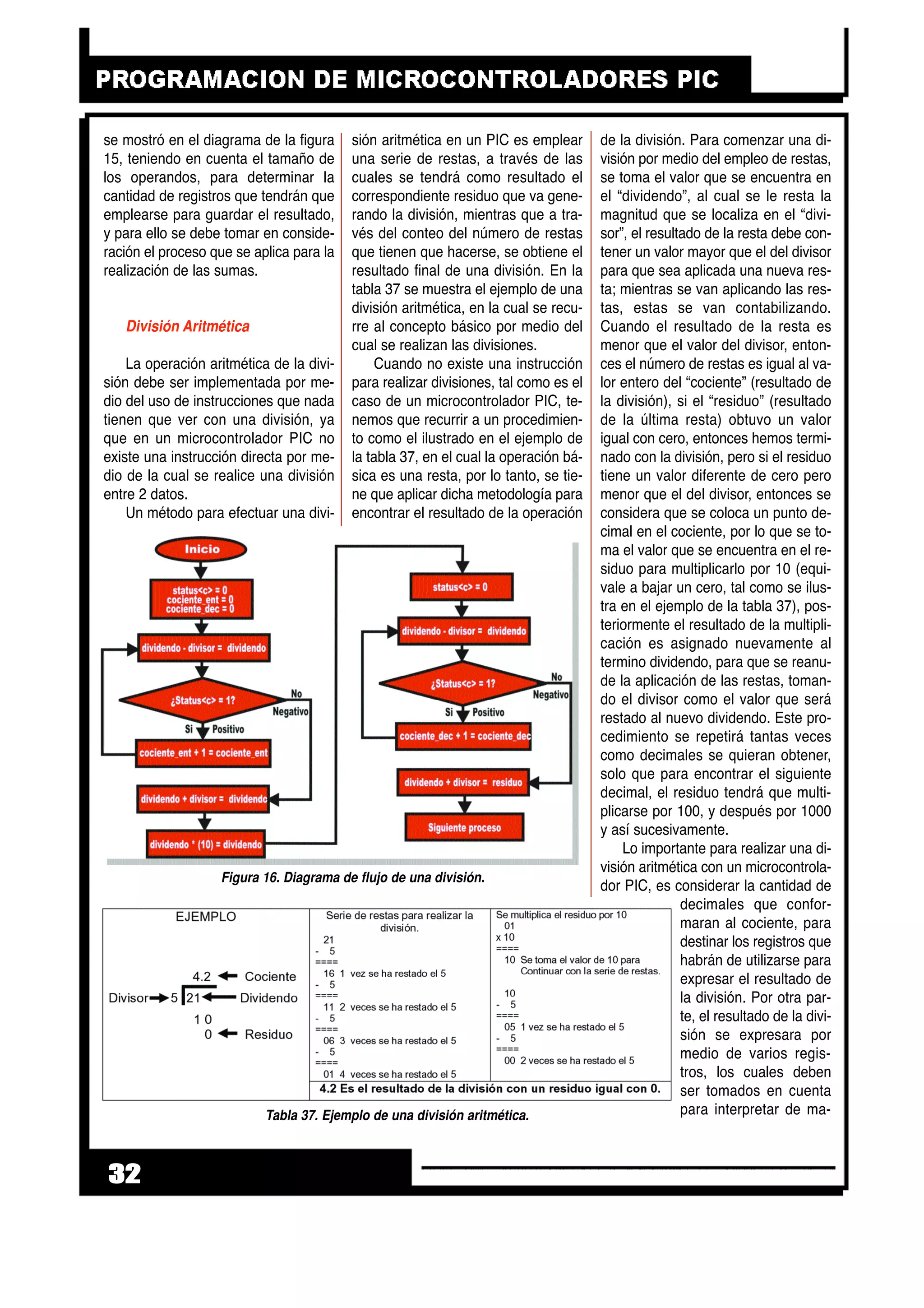
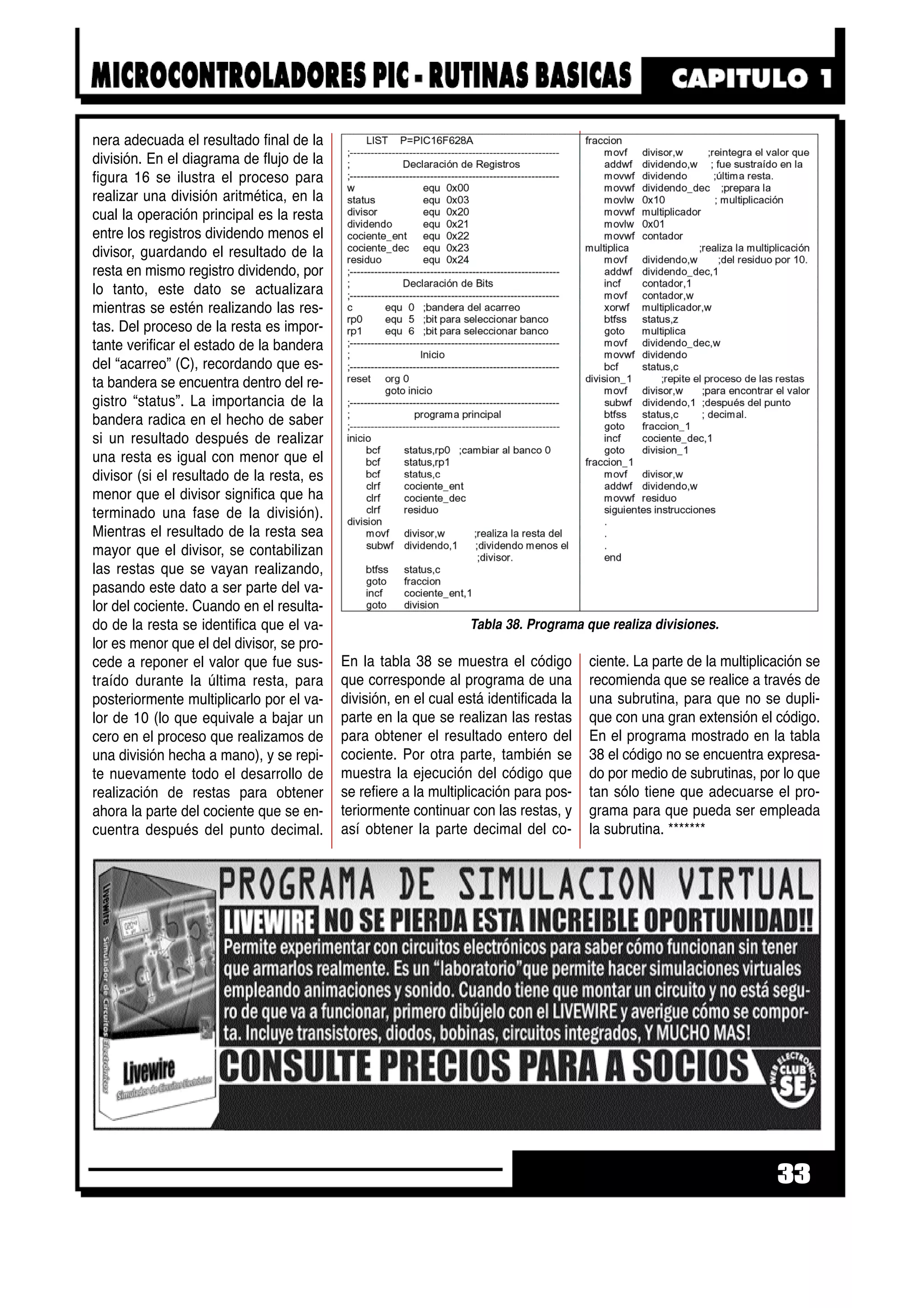
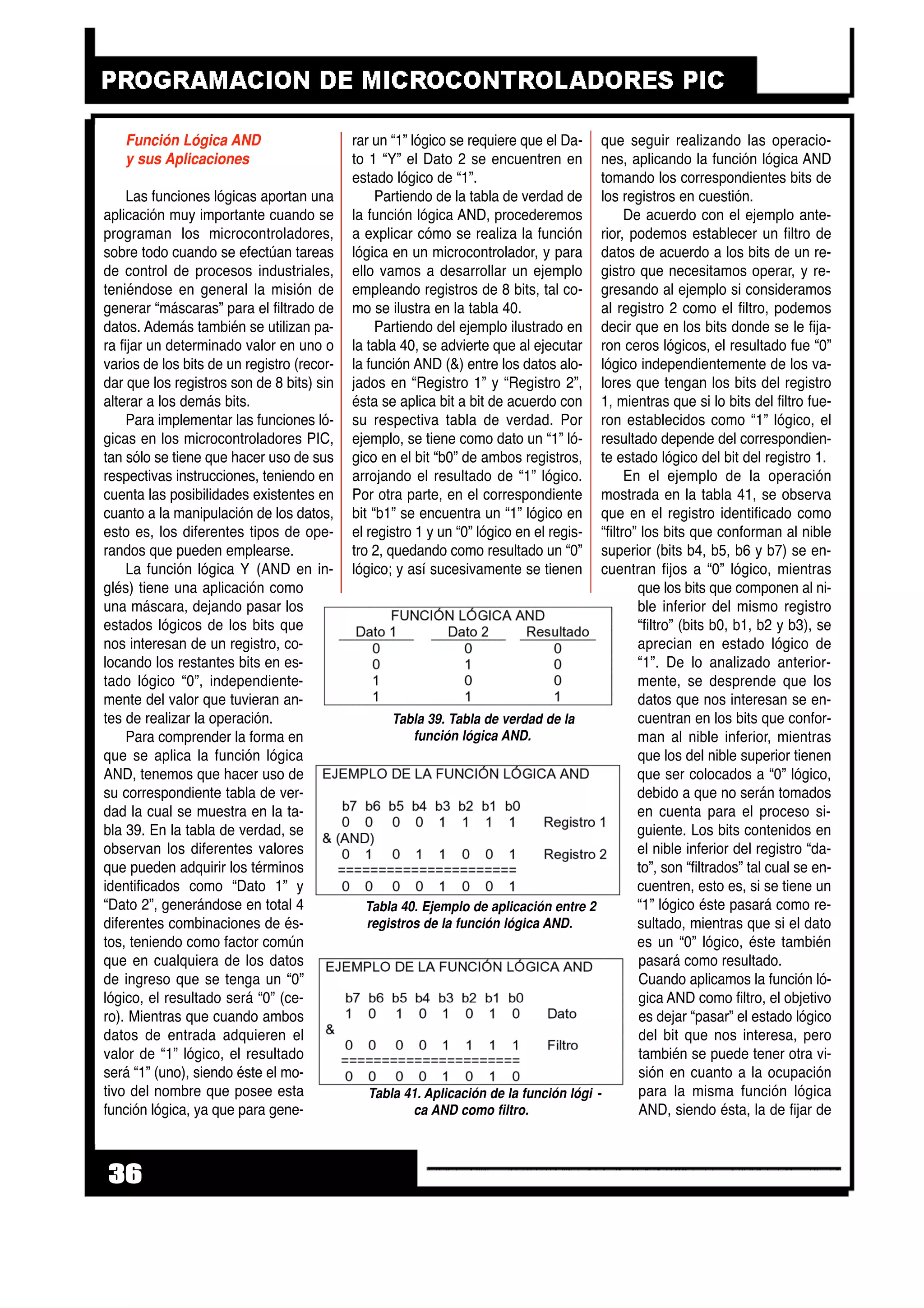
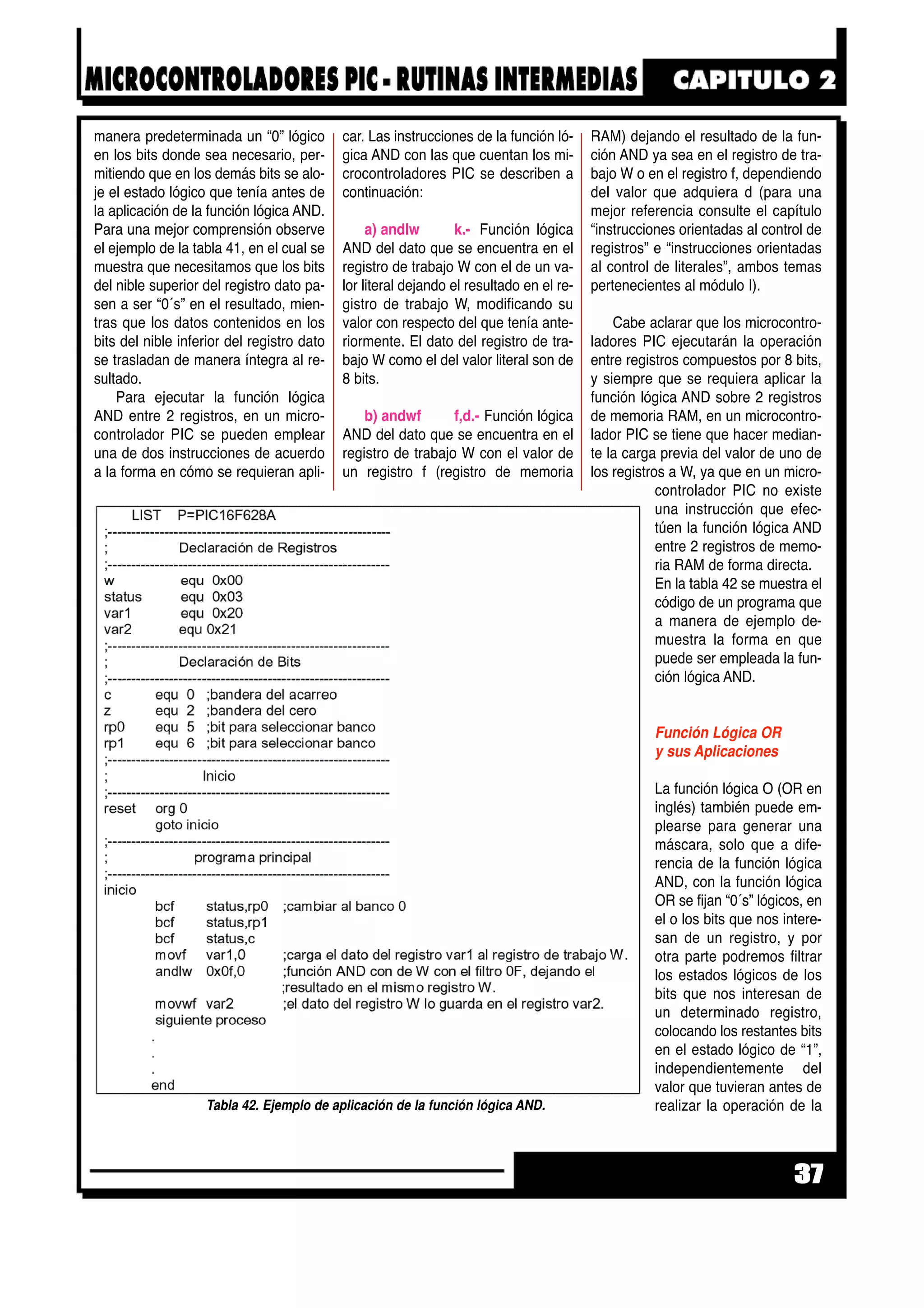
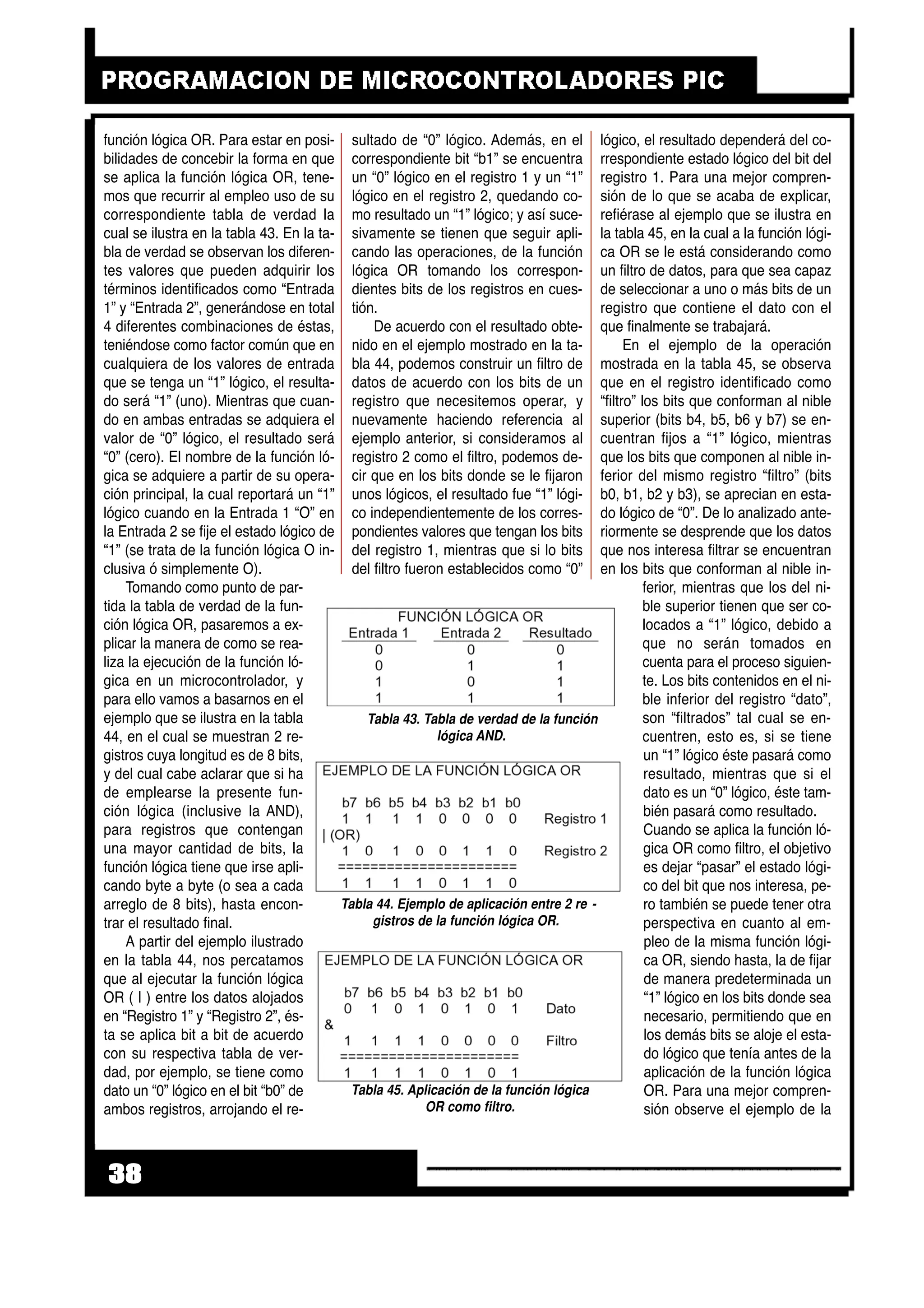
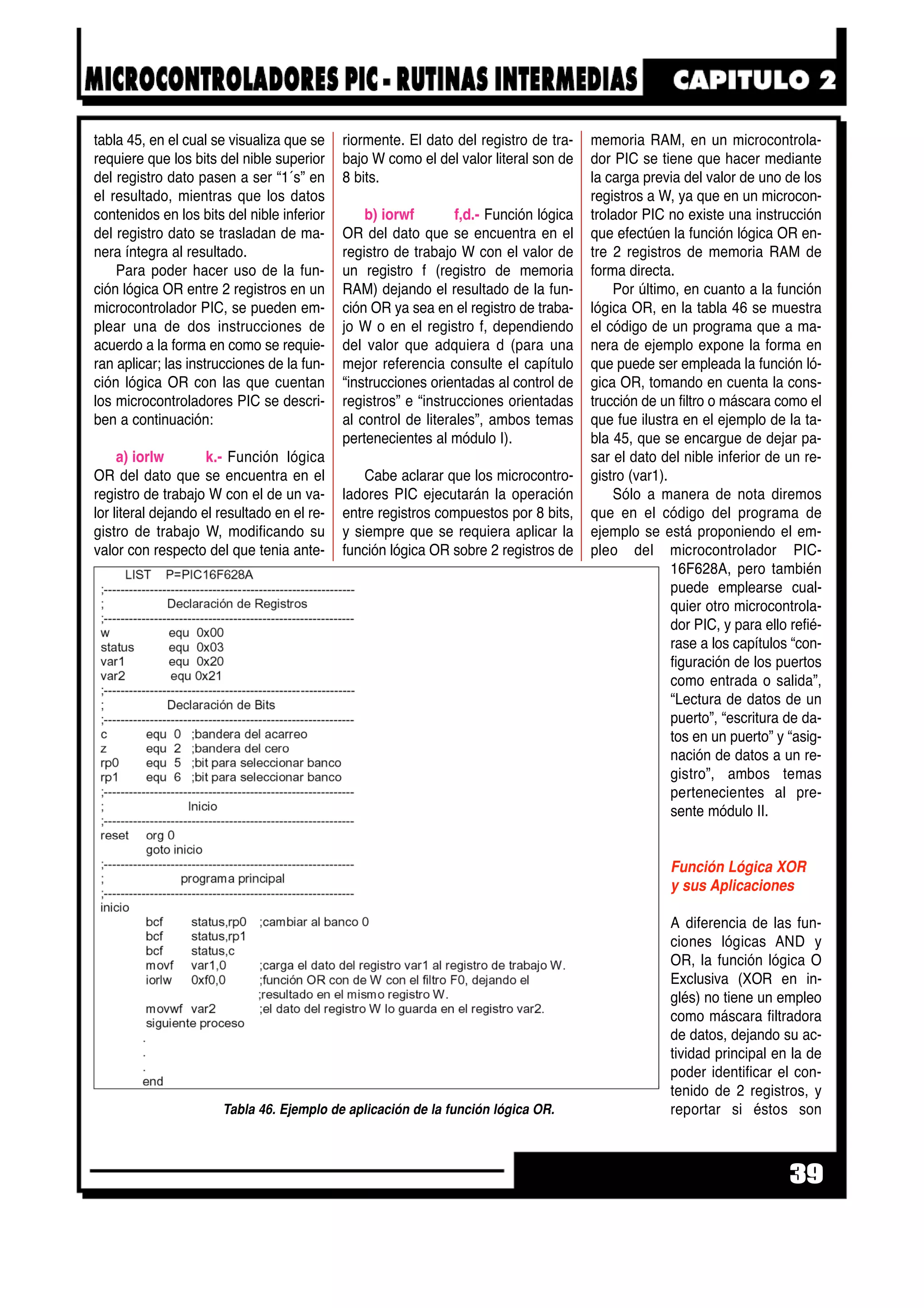
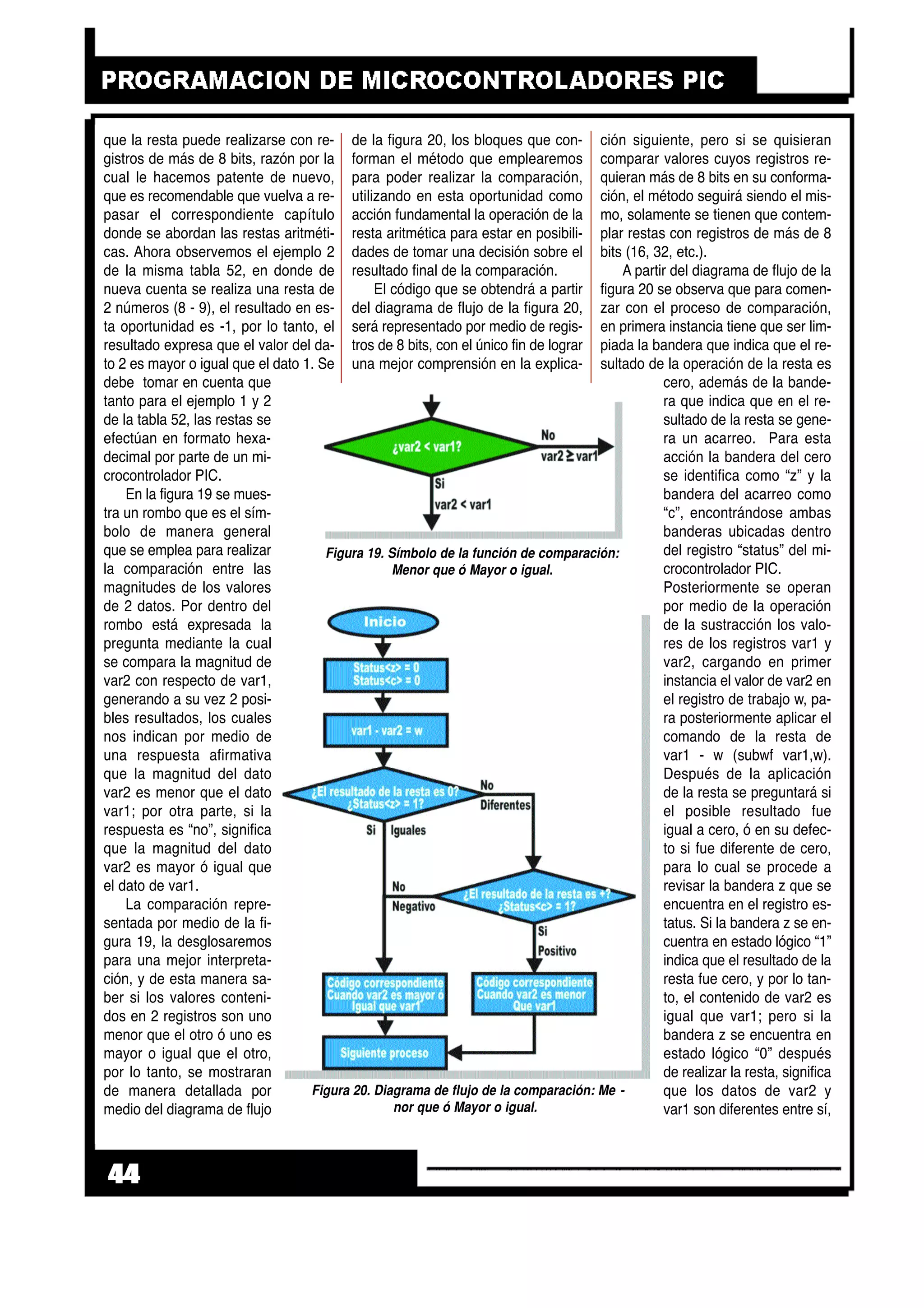
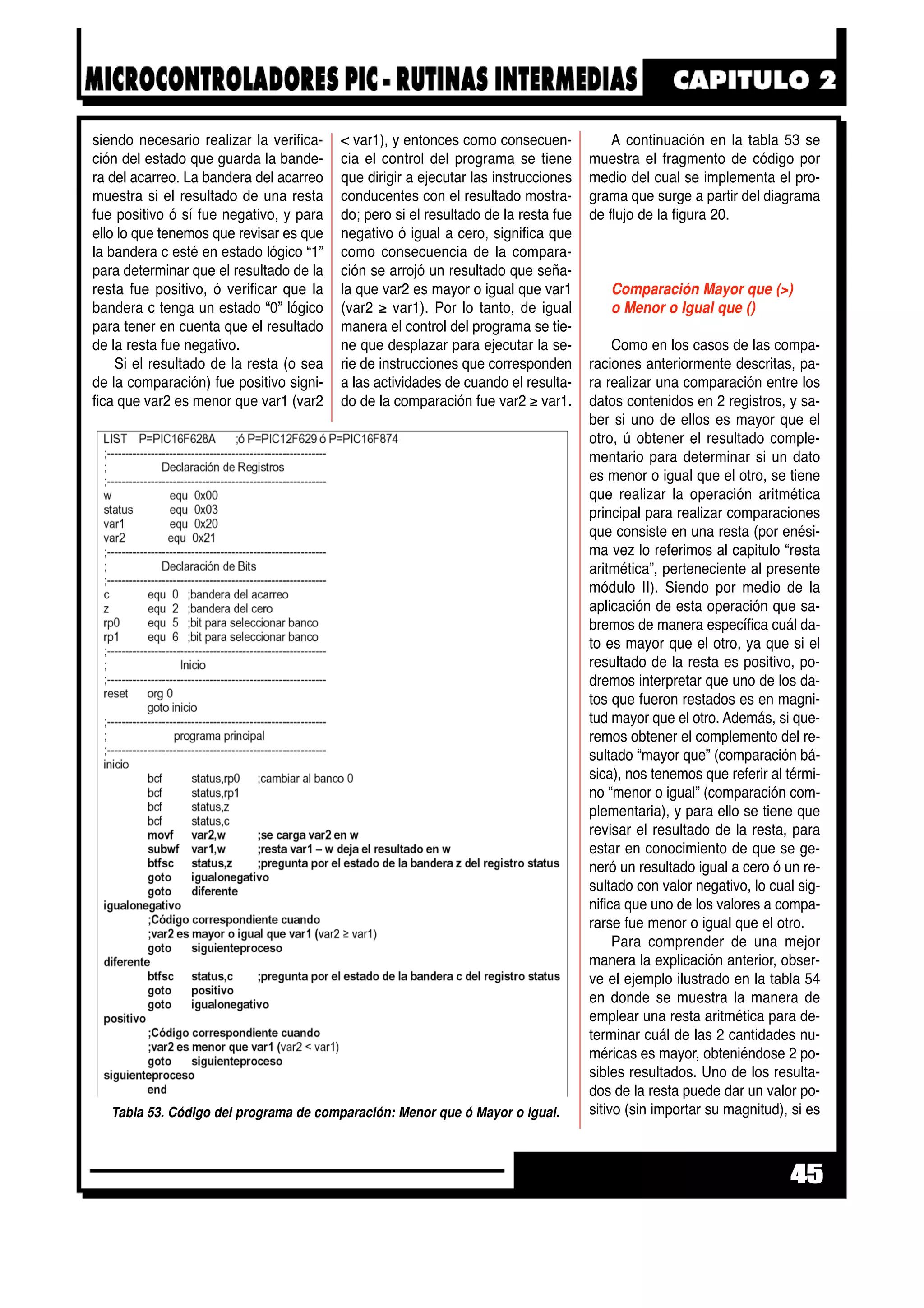
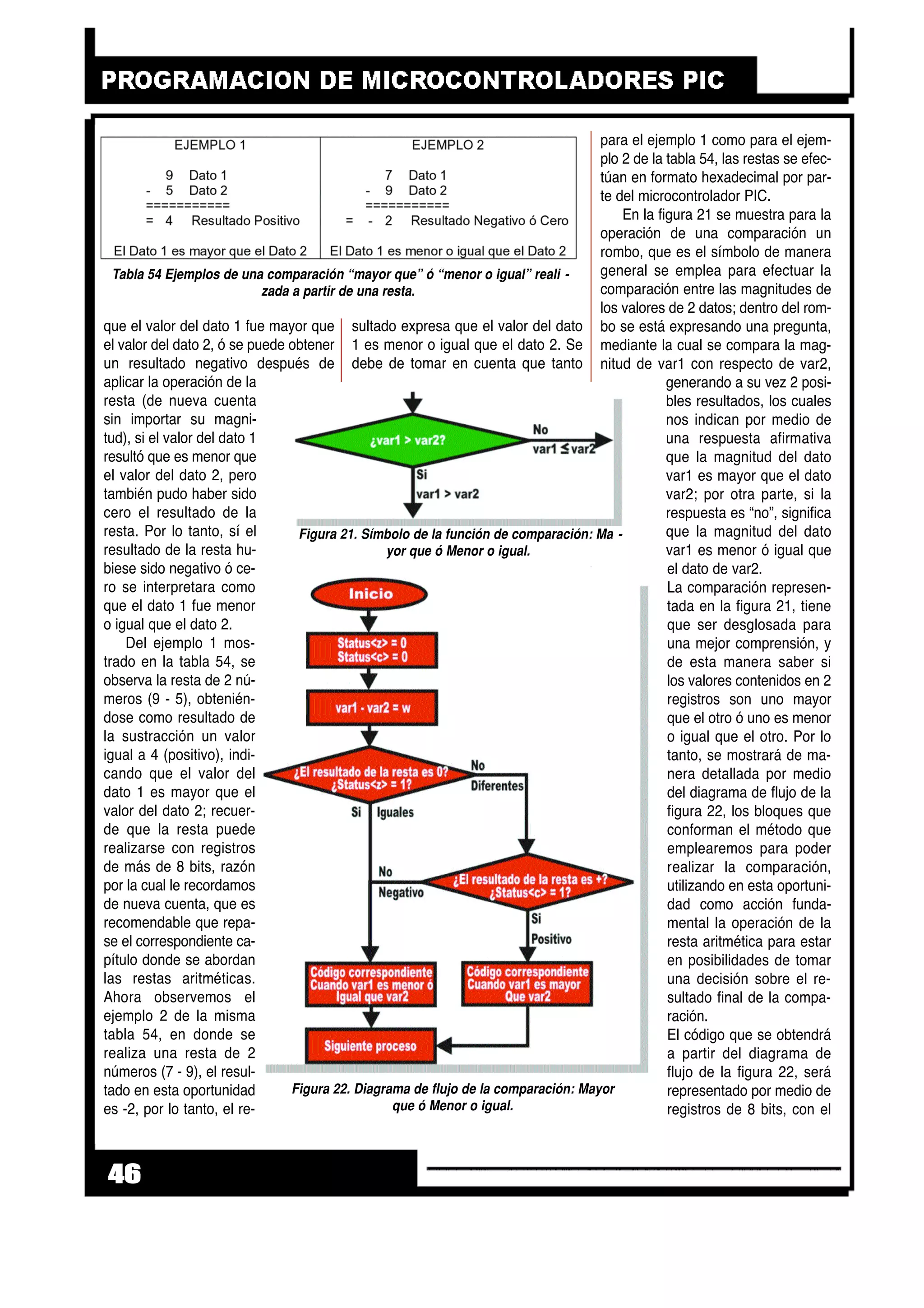
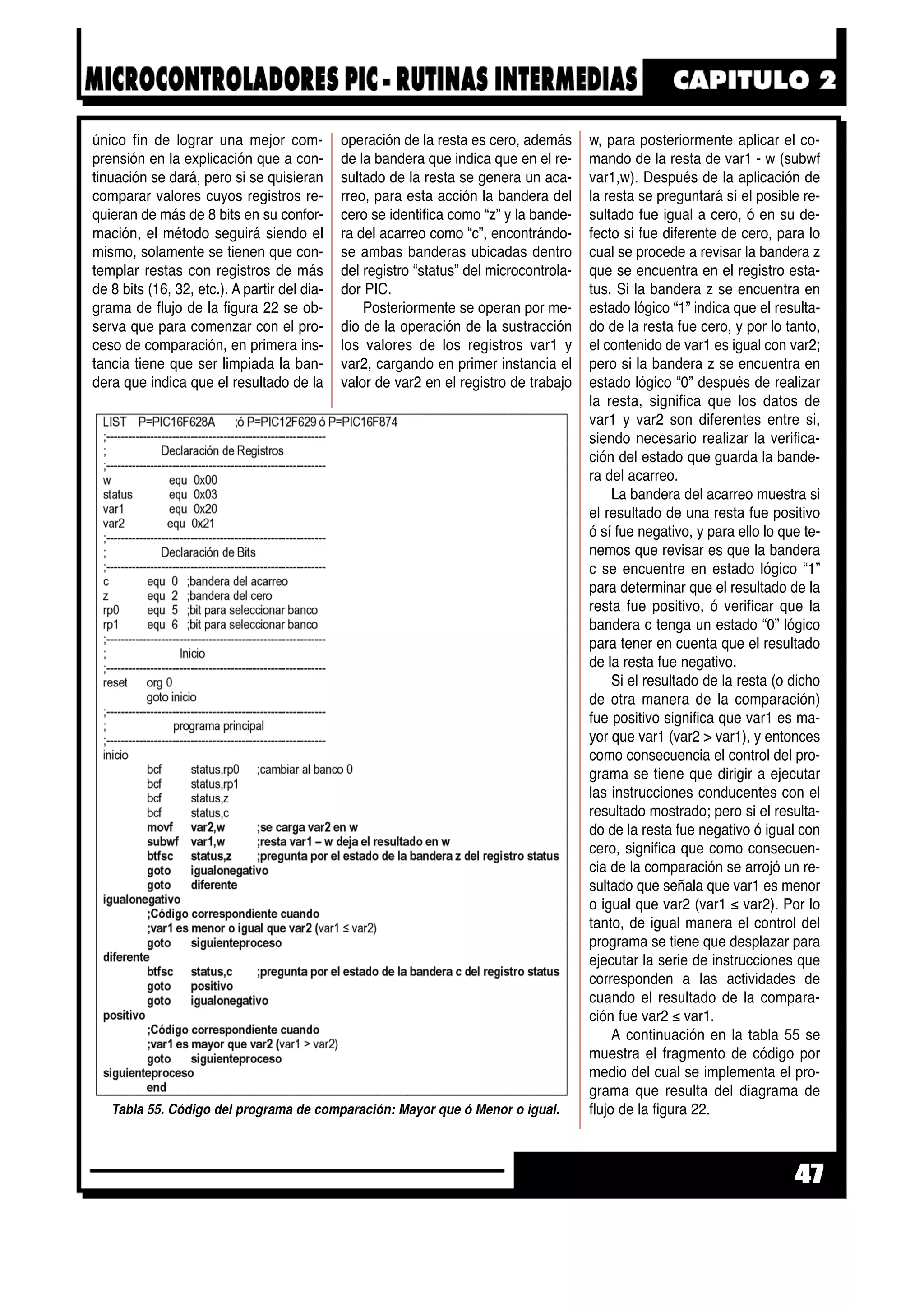

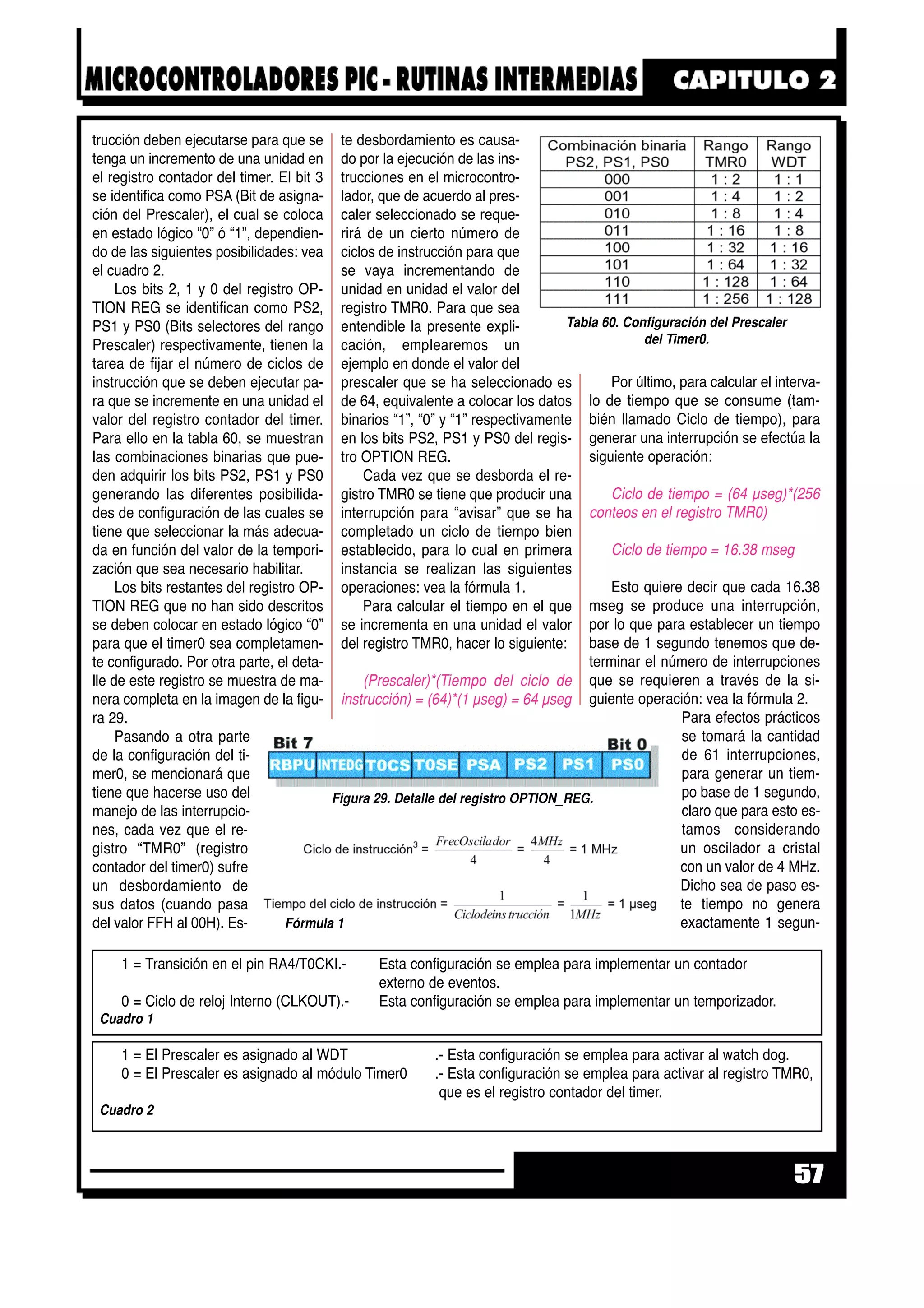
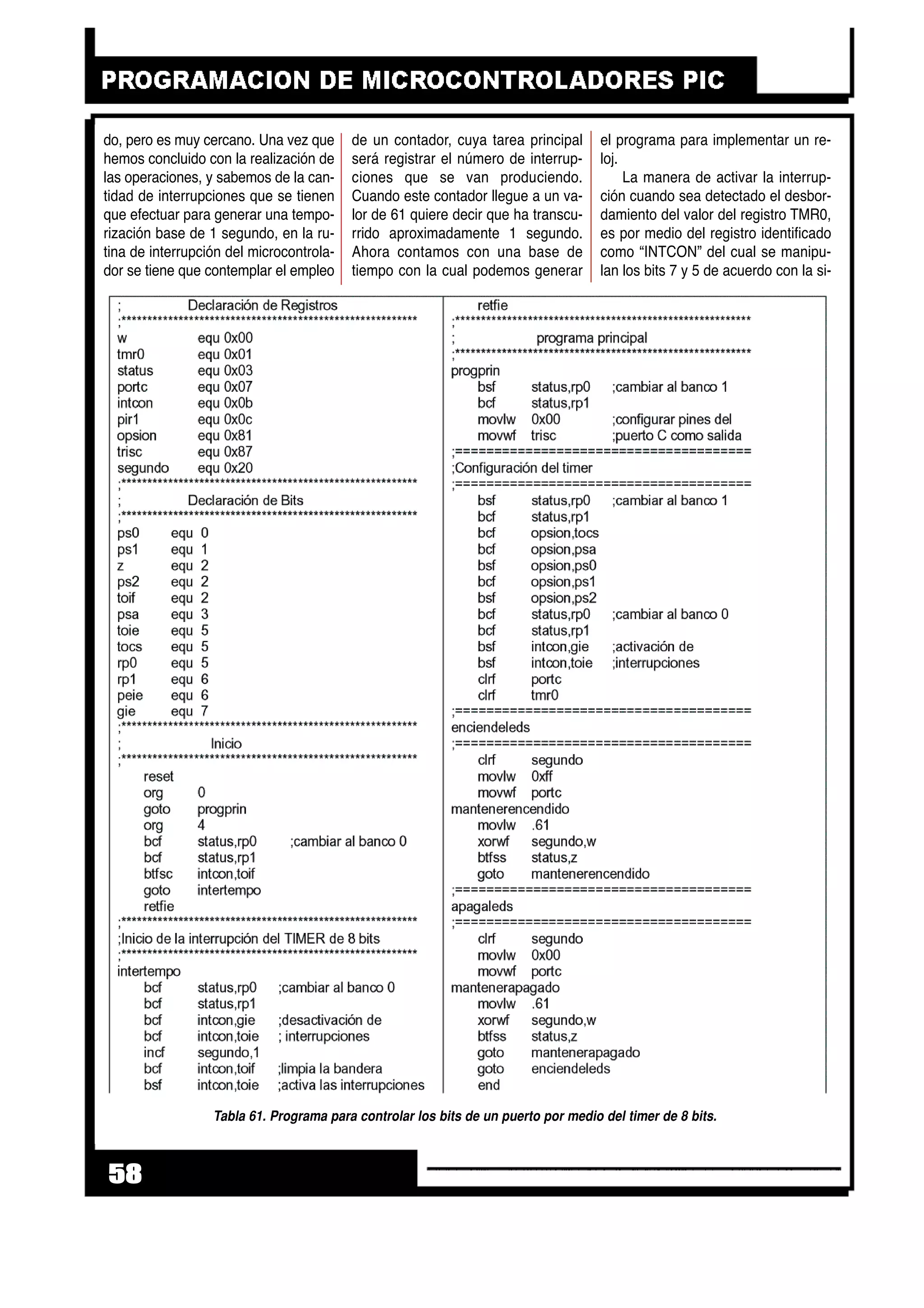
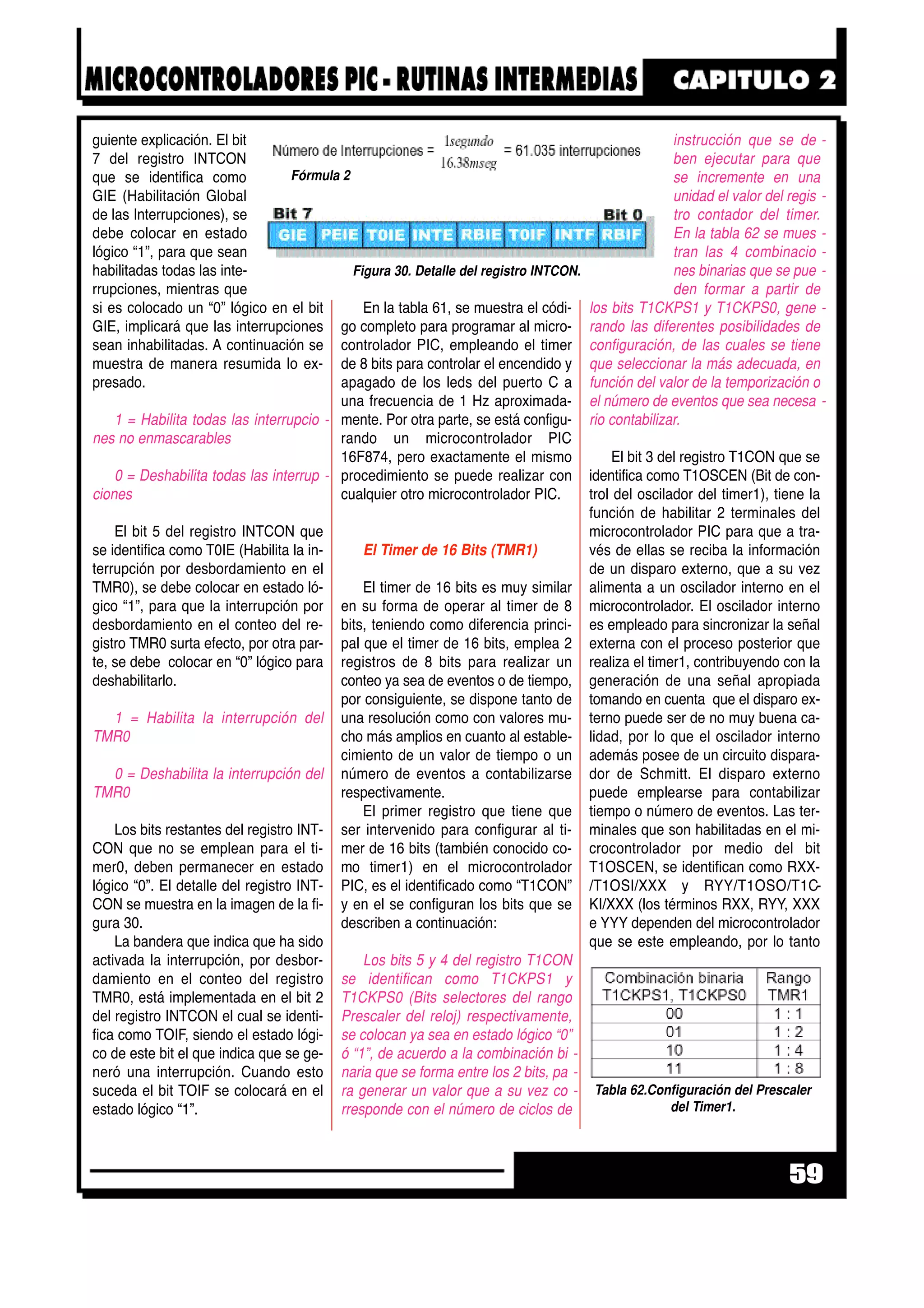
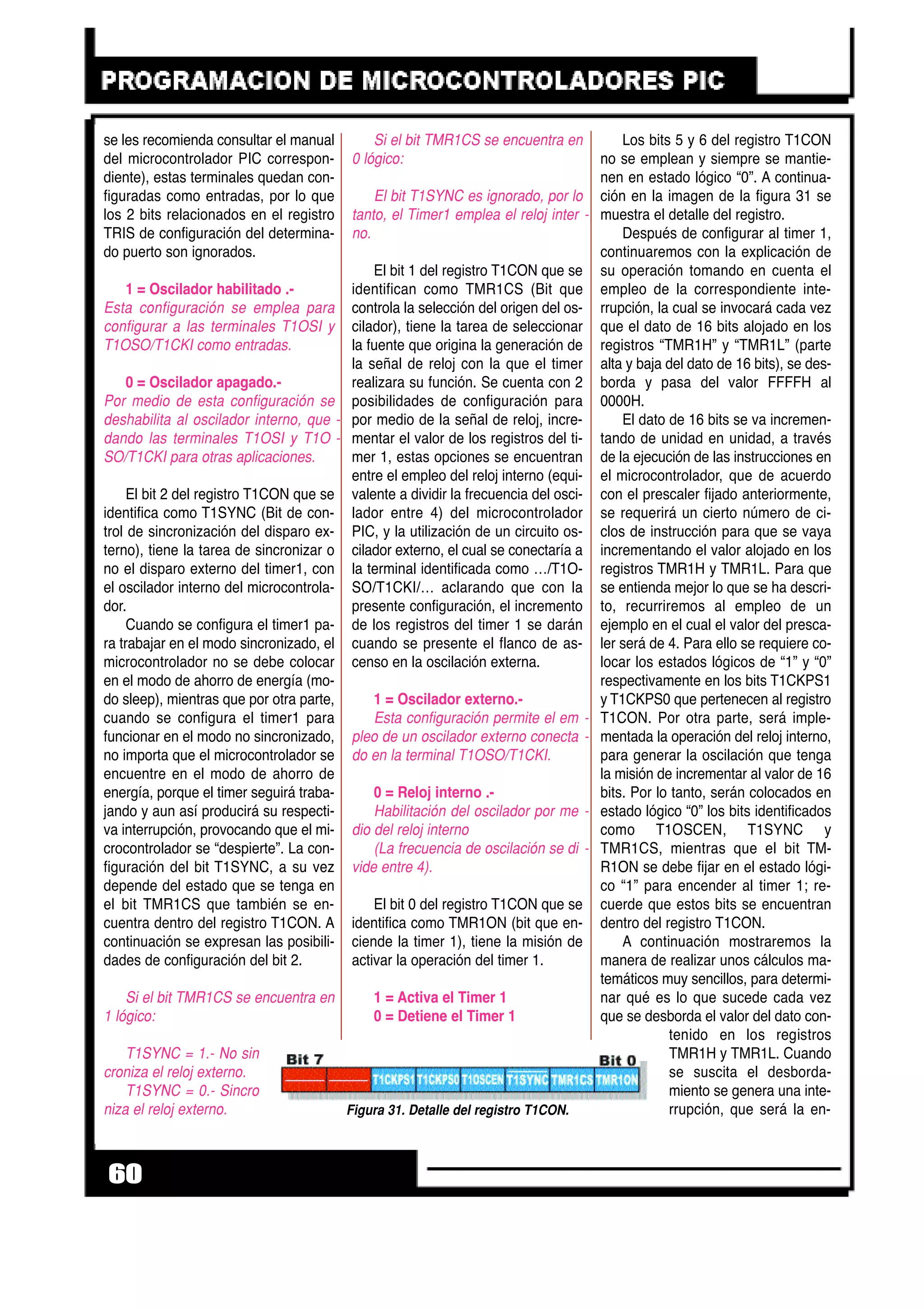
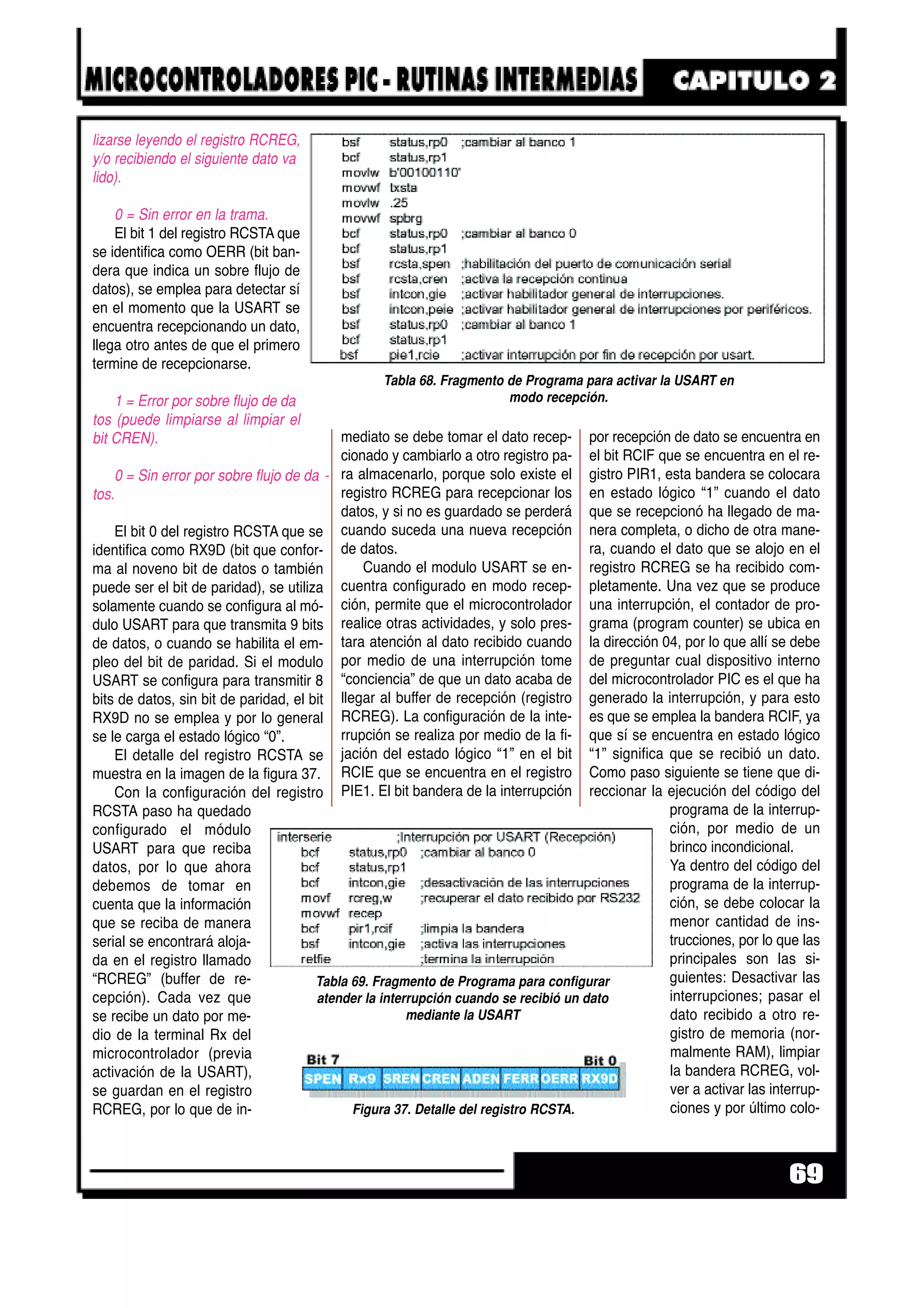
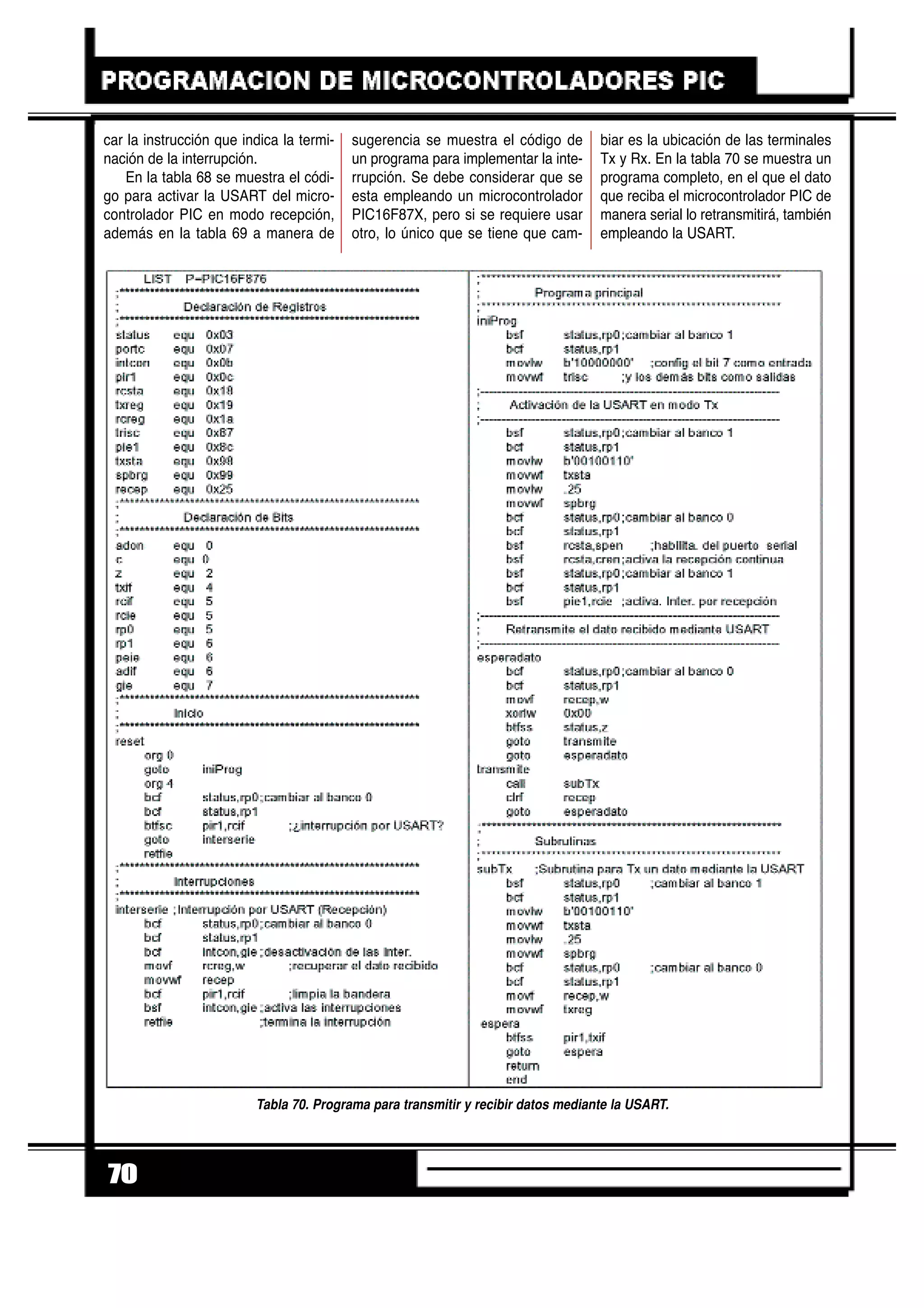
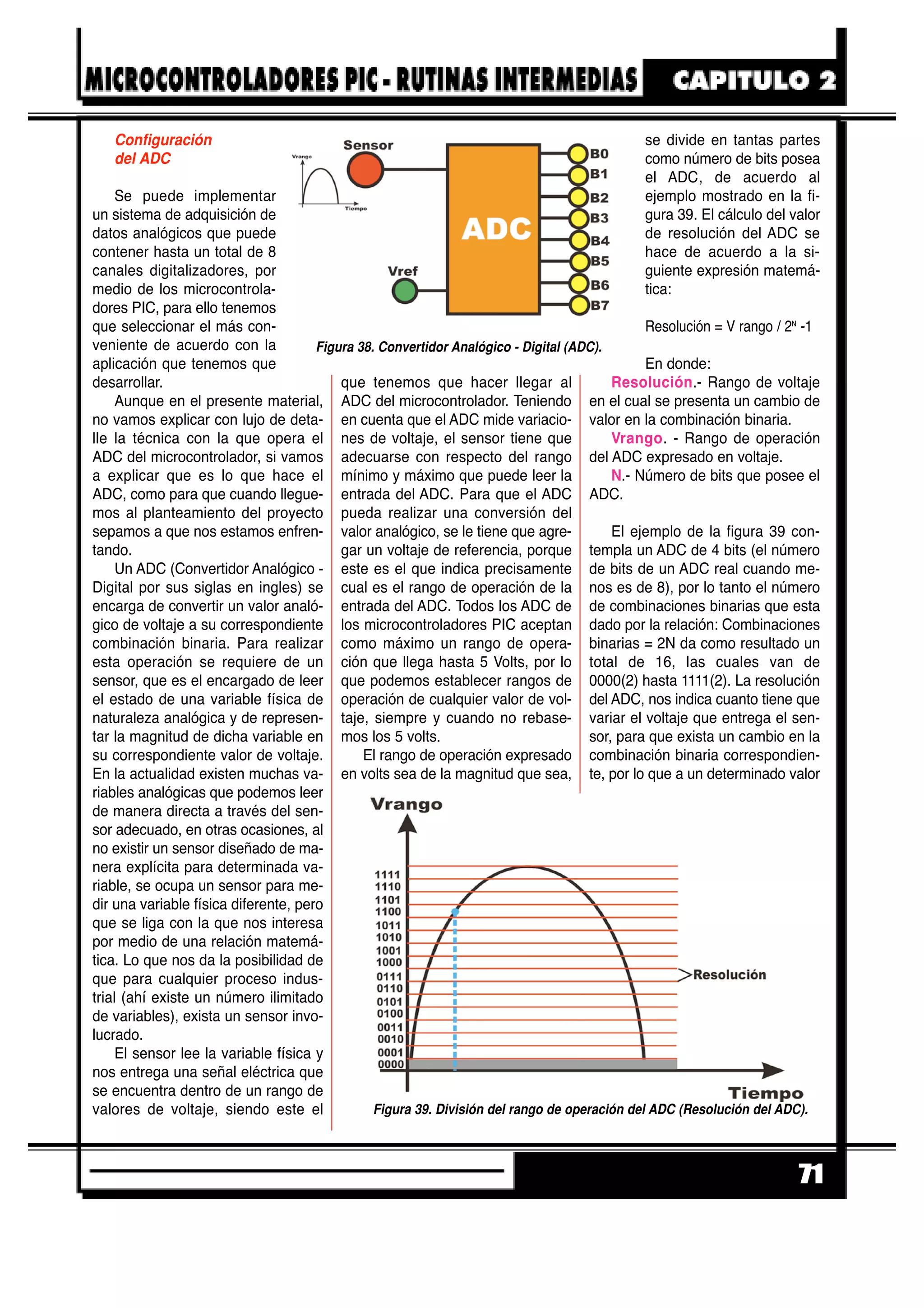
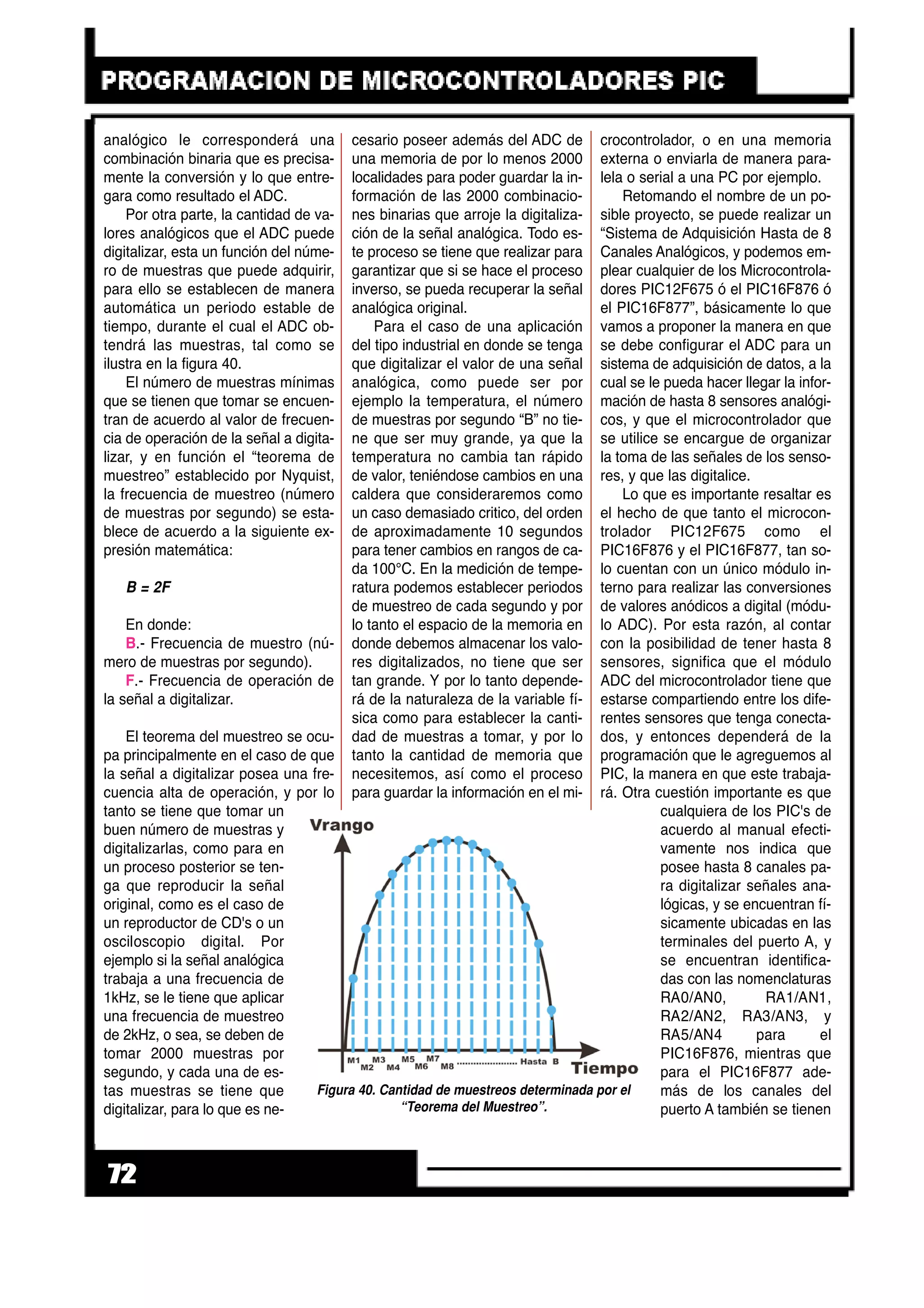


Este documento presenta un libro sobre la programación de microcontroladores PIC. Explica cómo configurar los puertos de entrada y salida, y cómo leer y escribir datos en los puertos. Luego describe rutinas básicas como contadores, retardos, y operaciones aritméticas usando registros. El objetivo es enseñar de manera gradual a programar microcontroladores PIC desde los conceptos más elementales.









































































