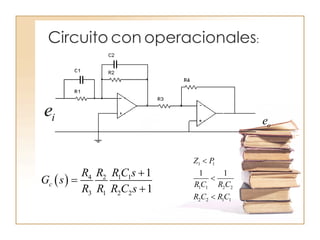
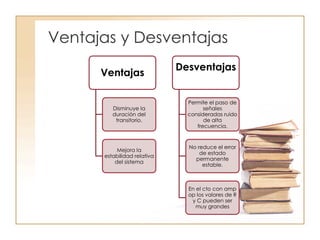
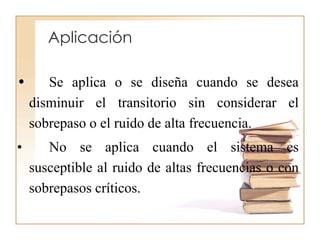
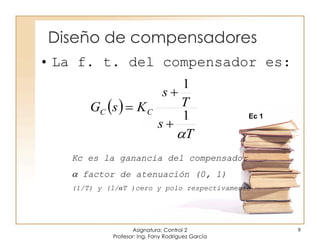
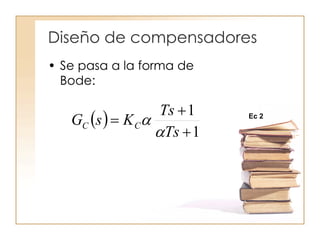
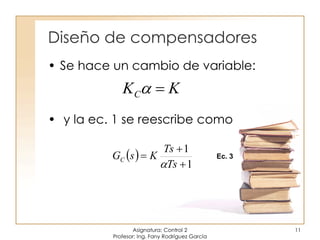
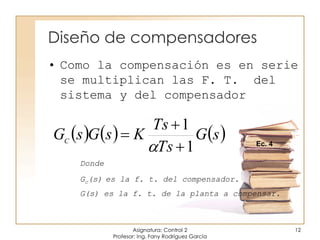
El documento describe el compensador de adelanto de fase. Se usa para mejorar el desempeño transitorio de un sistema en lazo cerrado incrementando el margen de fase. El compensador tiene un cero sobre el eje real negativo y un polo a su izquierda, lo que produce una respuesta de fase siempre positiva. Mejora el amortiguamiento y margen de fase pero permite el paso de ruido de alta frecuencia.


















































![EE648N_compensadores adel_atra_bode[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ee648ncompensadoresadelatrabode1-251021235949-01aa68bd-thumbnail.jpg?width=640&height=640&fit=bounds)




















