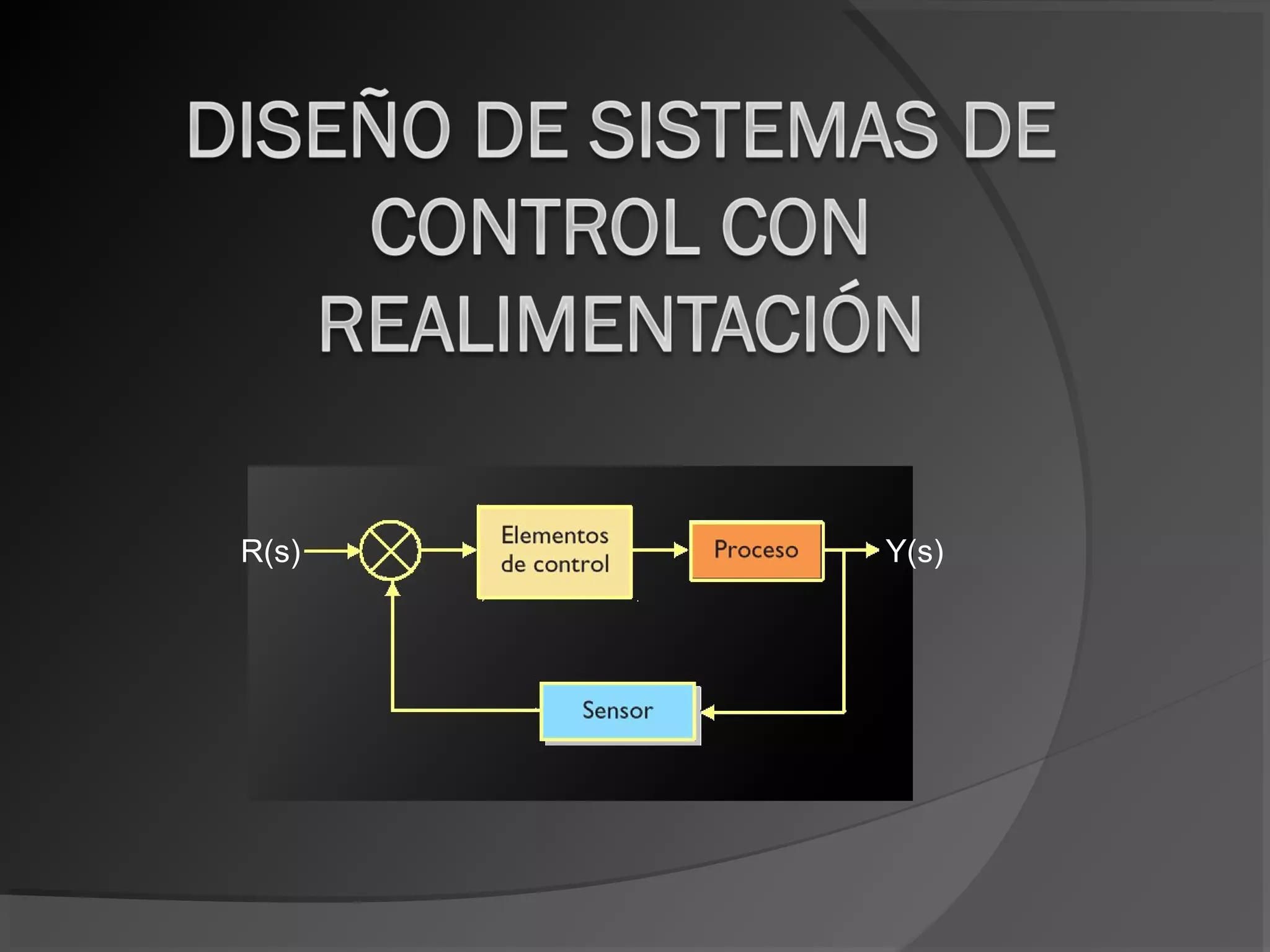
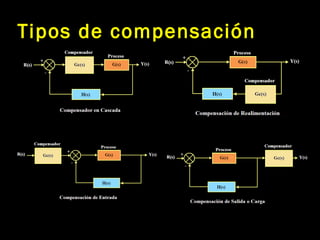
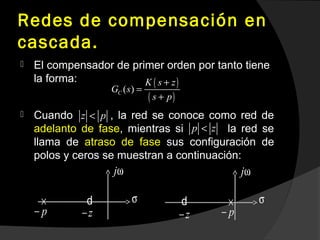
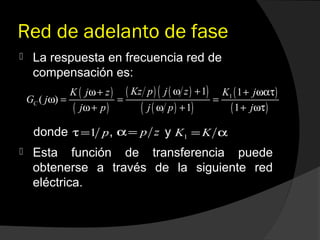
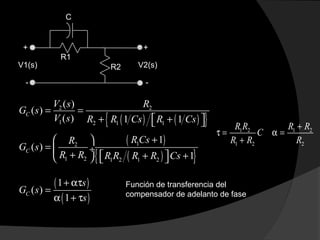
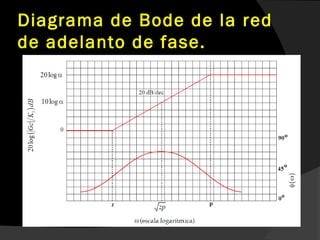
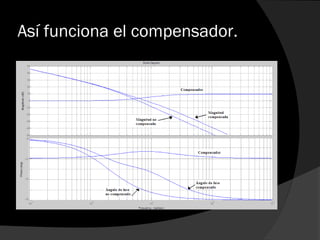
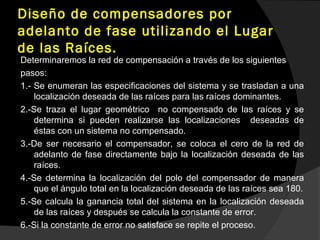
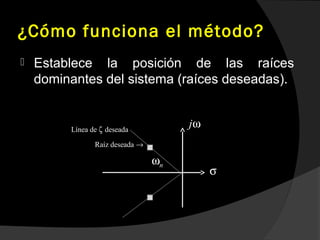
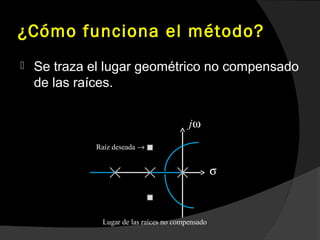
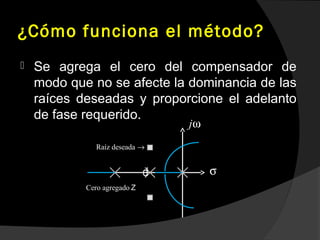
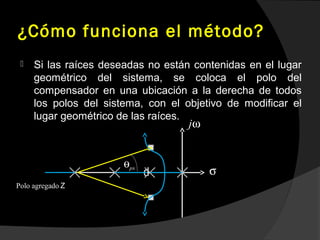
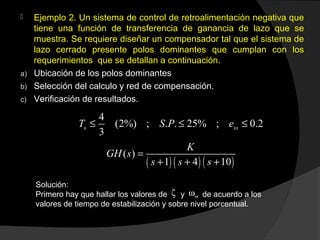
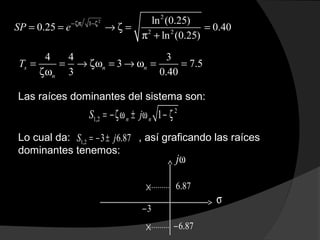
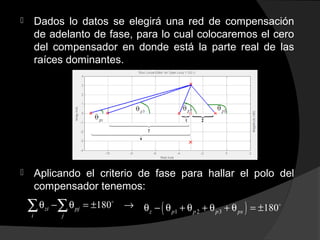
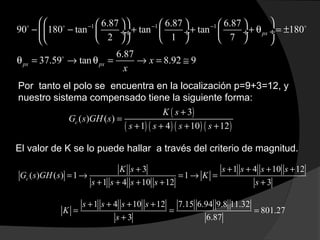
El documento describe los conceptos y métodos de compensación de sistemas de control. Explica que la compensación se utiliza para mejorar el comportamiento de un sistema de control para que cumpla mejor con los requerimientos específicos, mediante la inserción de un componente adicional llamado compensador. Luego detalla dos tipos de compensadores (adelanto y retardo de fase) y sus respectivas redes, y métodos de diseño utilizando diagramas de Bode y el lugar de las raíces. Finalmente presenta un ejemplo numérico de diseño de compensador por adel







































![EE648N_compensadores adel_atra_bode[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/ee648ncompensadoresadelatrabode1-251021235949-01aa68bd-thumbnail.jpg?width=640&height=640&fit=bounds)

































