Descargado 11 veces


El documento describe la creación de una aplicación móvil con App Inventor para controlar un vehículo robótico mediante Arduino y conexión Bluetooth. El vehículo está equipado con servos para el movimiento y control, además de un sensor ultrasónico y luces. Se detallan los programas de Arduino y la aplicación, que incluyen el manejo de la comunicación y el control de los servos mediante comandos específicos.
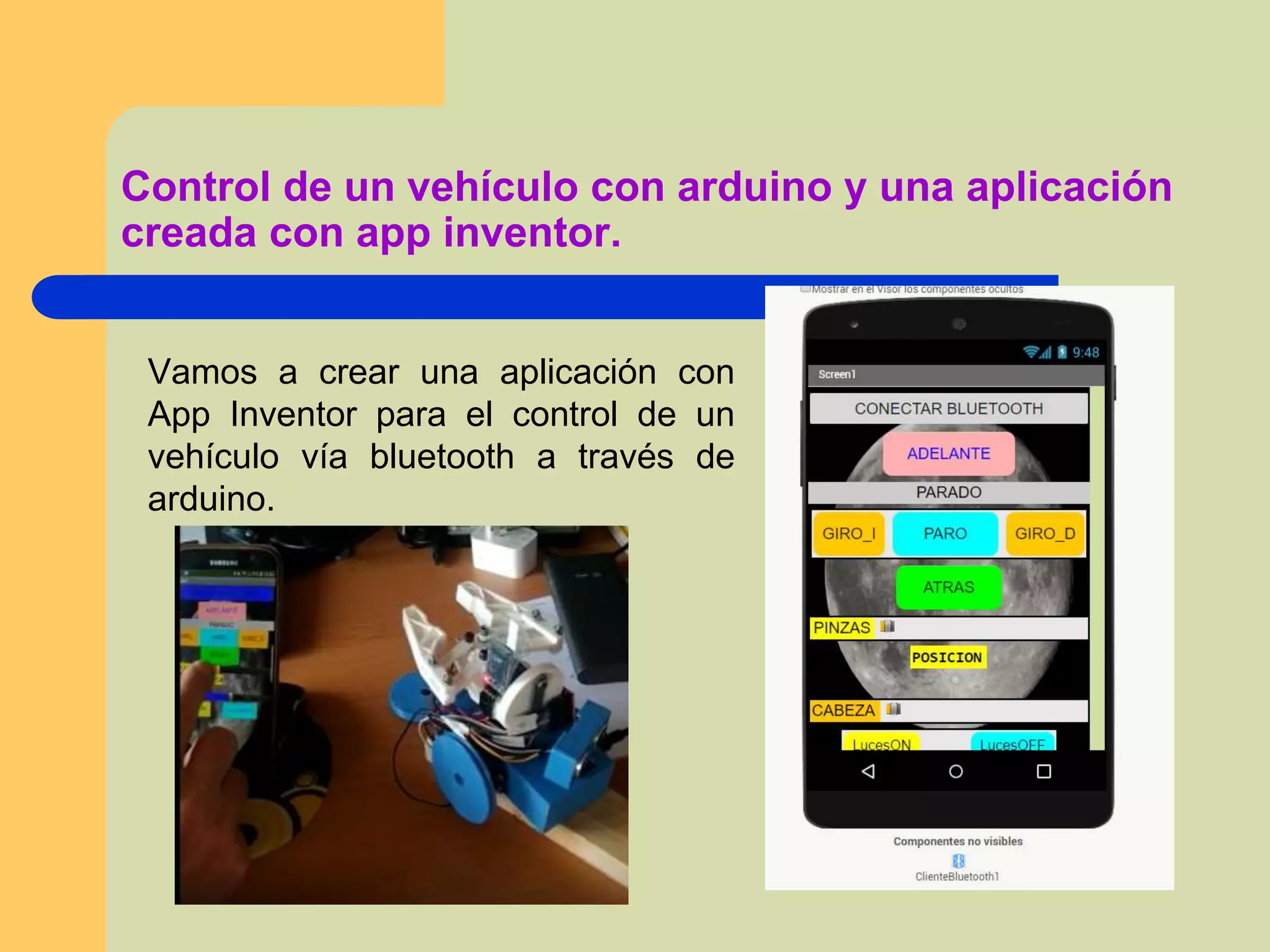
Introducción al control de un vehículo mediante Arduino y una aplicación móvil usando App Inventor.
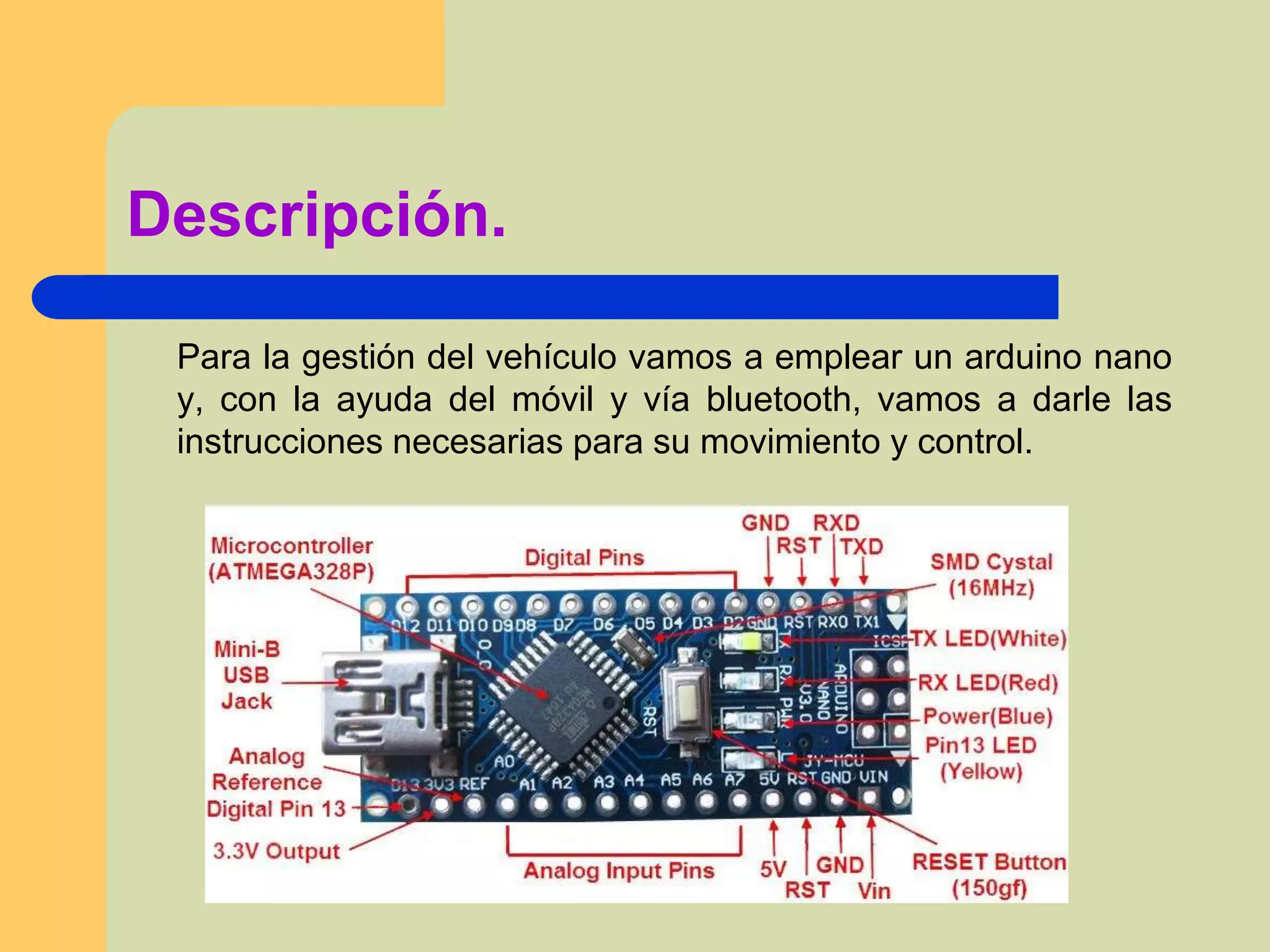
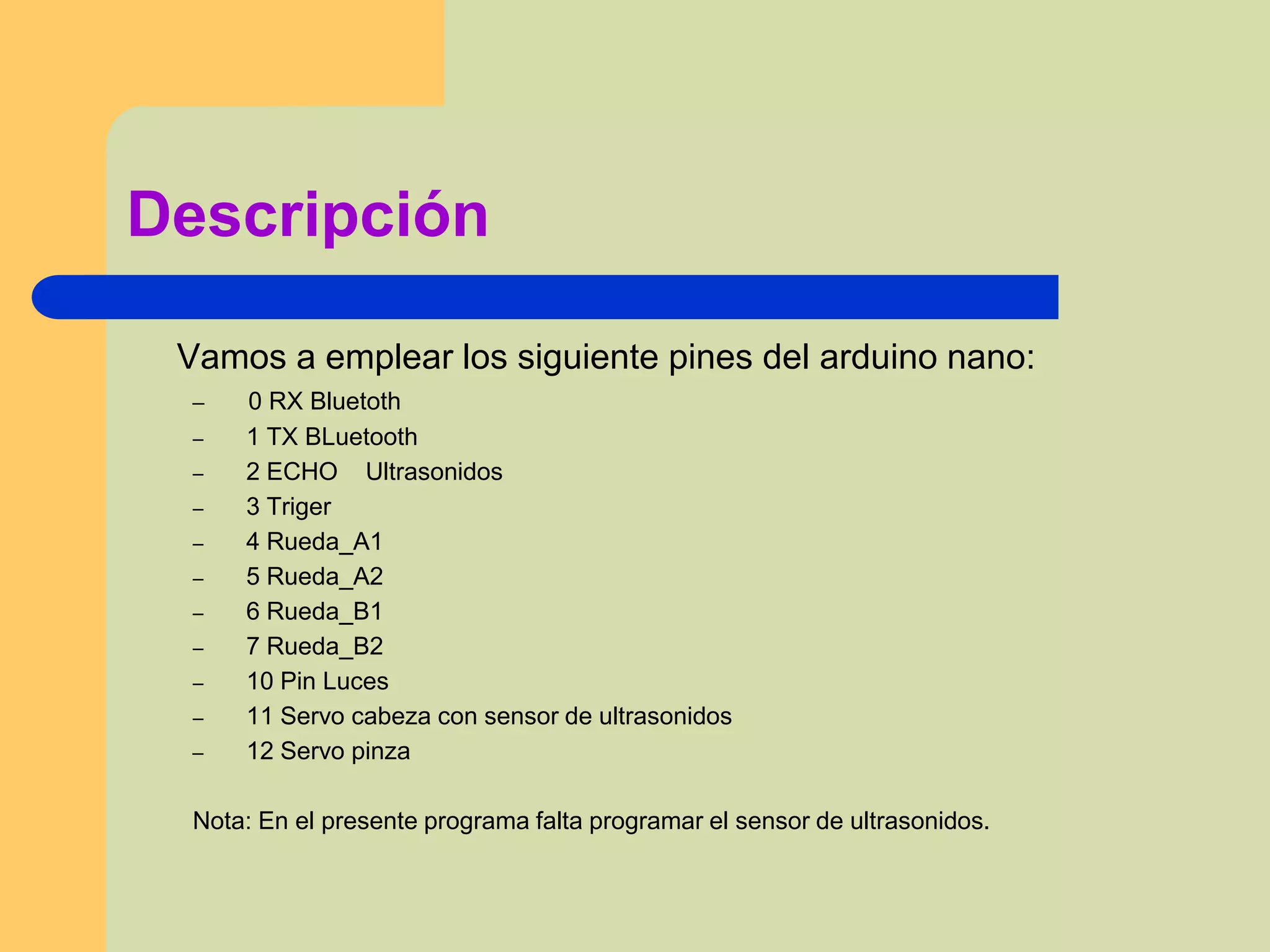
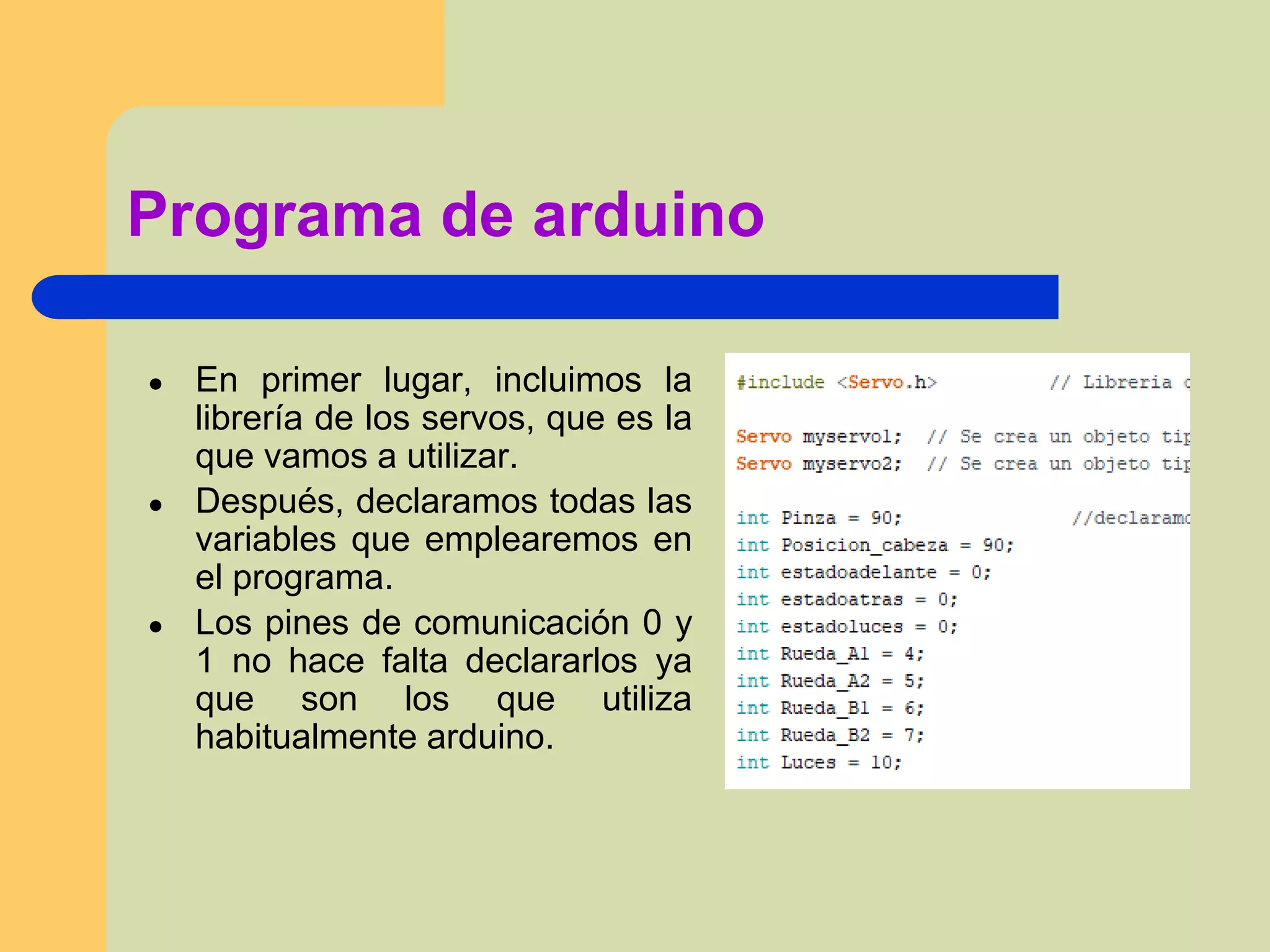
Detalles sobre la configuración del vehículo, incluyendo componentes como servos, pinzas y sensores.
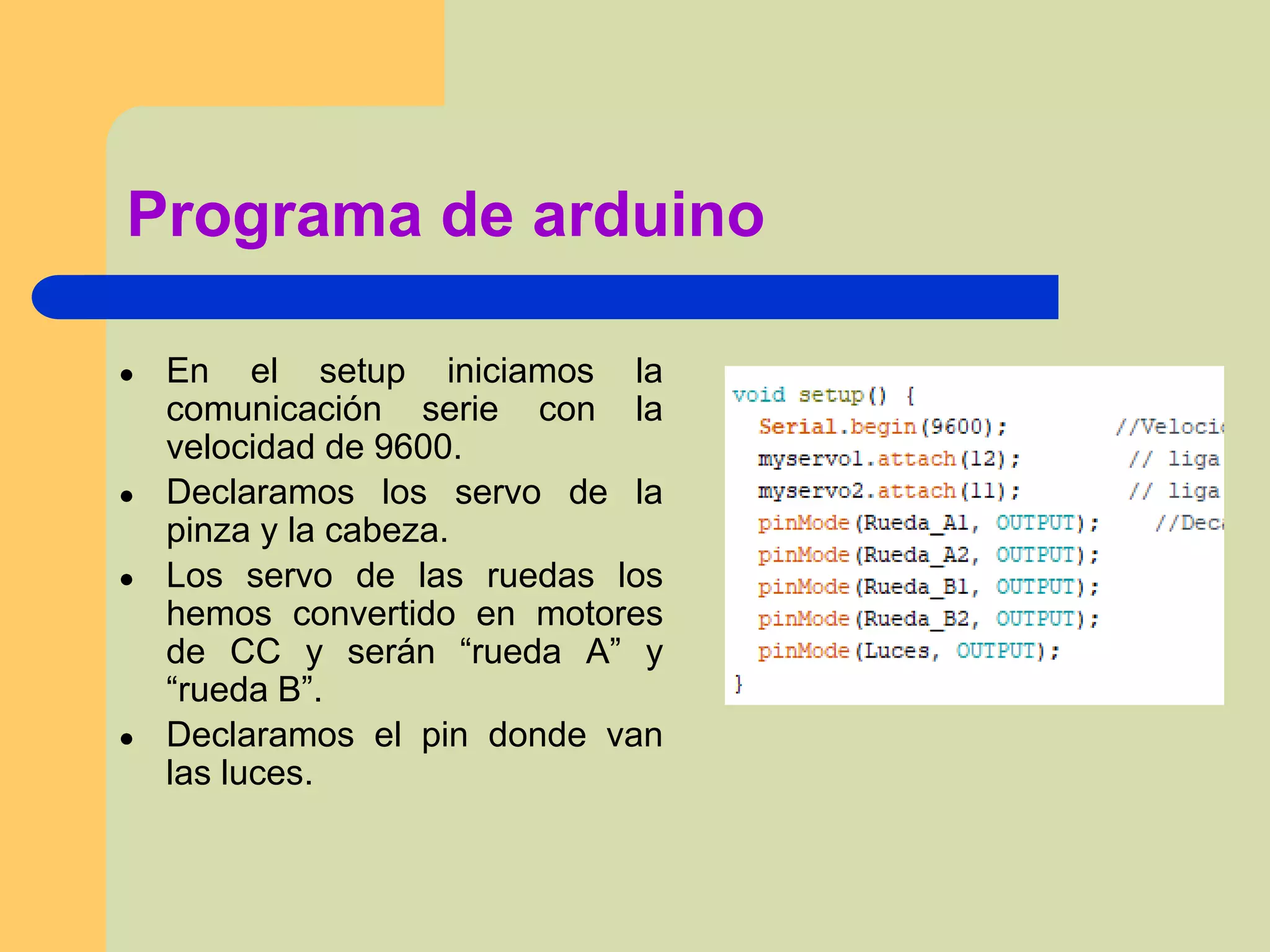
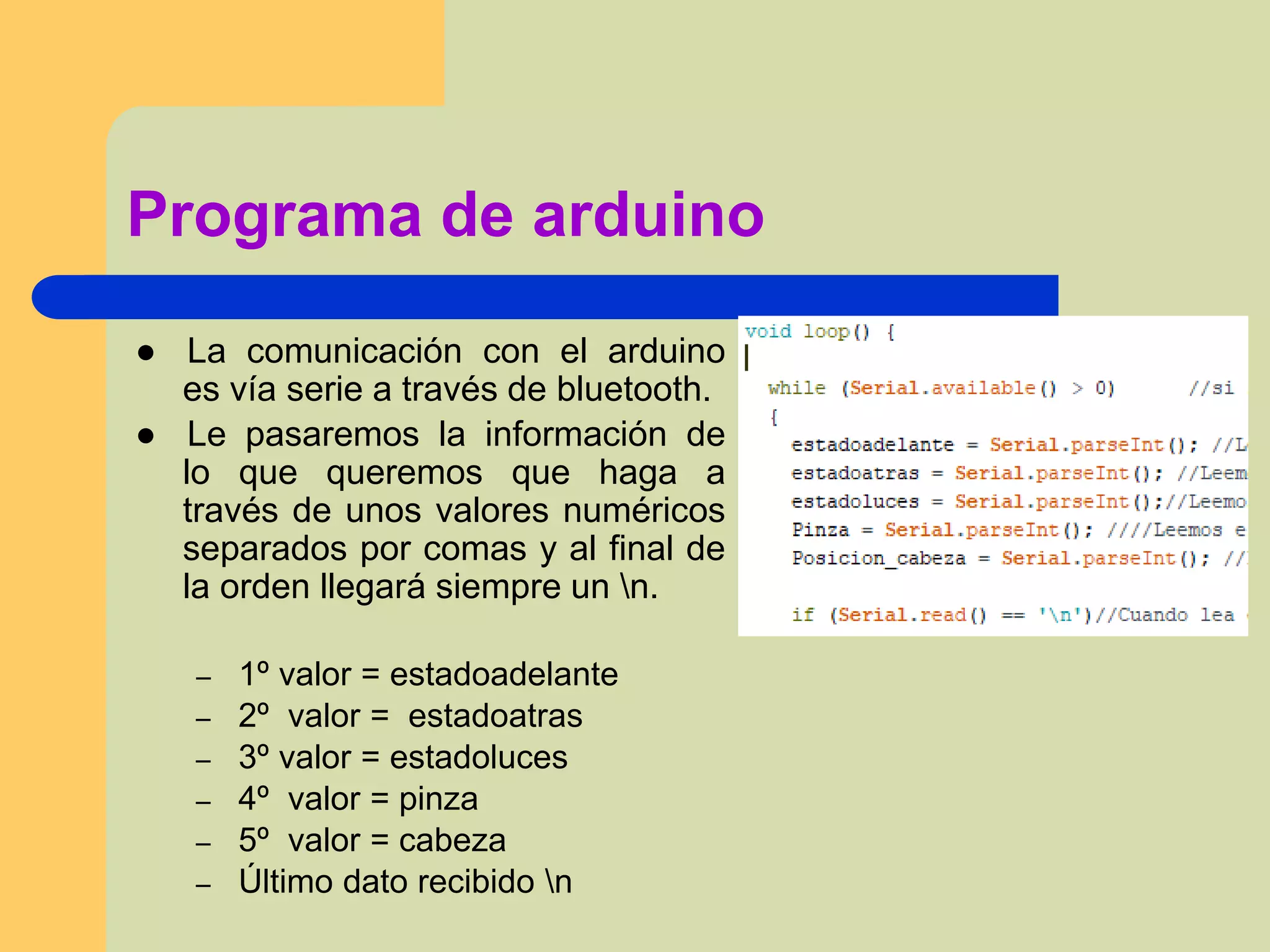
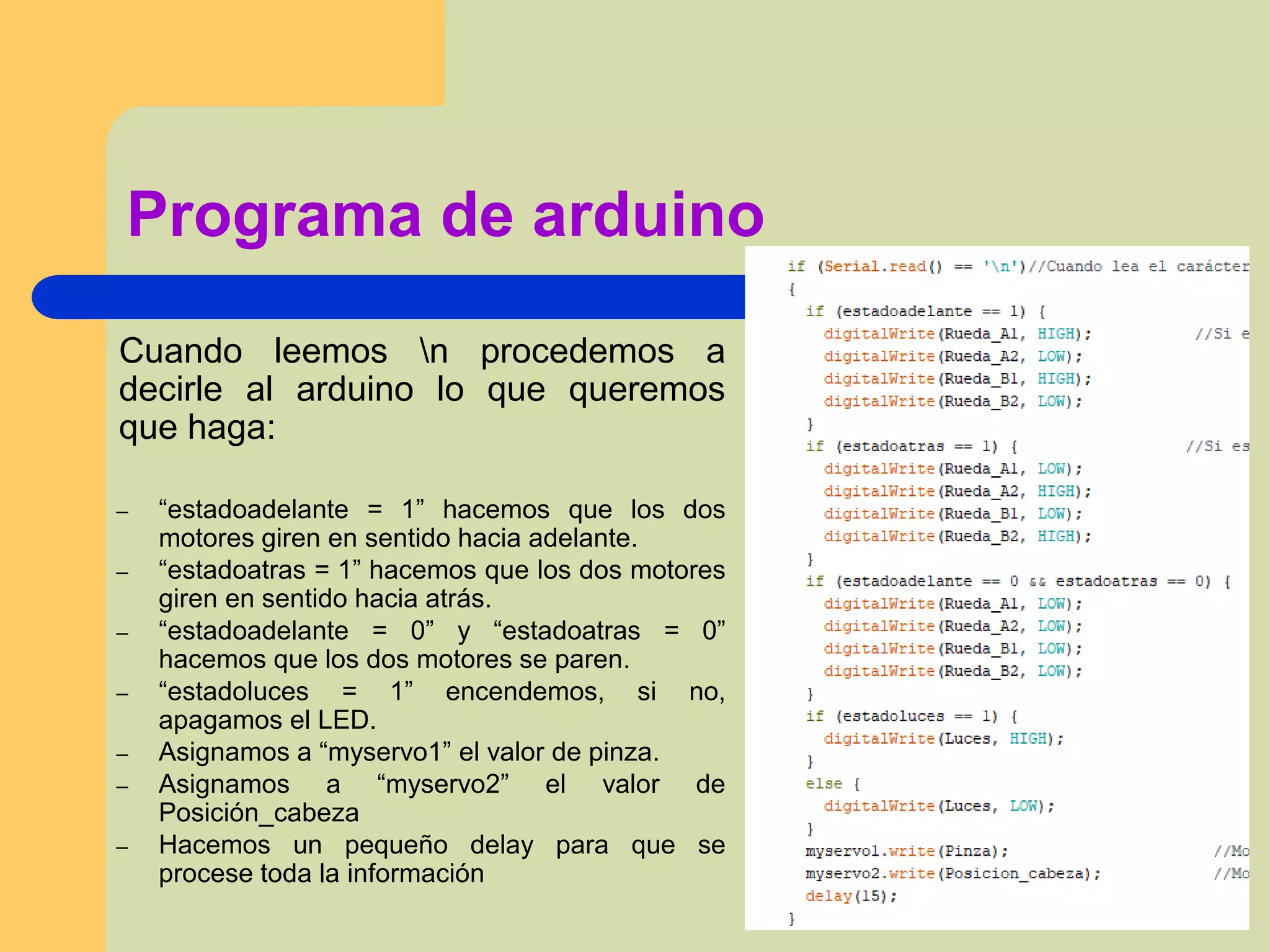
Instrucciones sobre la programación de Arduino, incluyendo la comunicación serie y el control de motores.
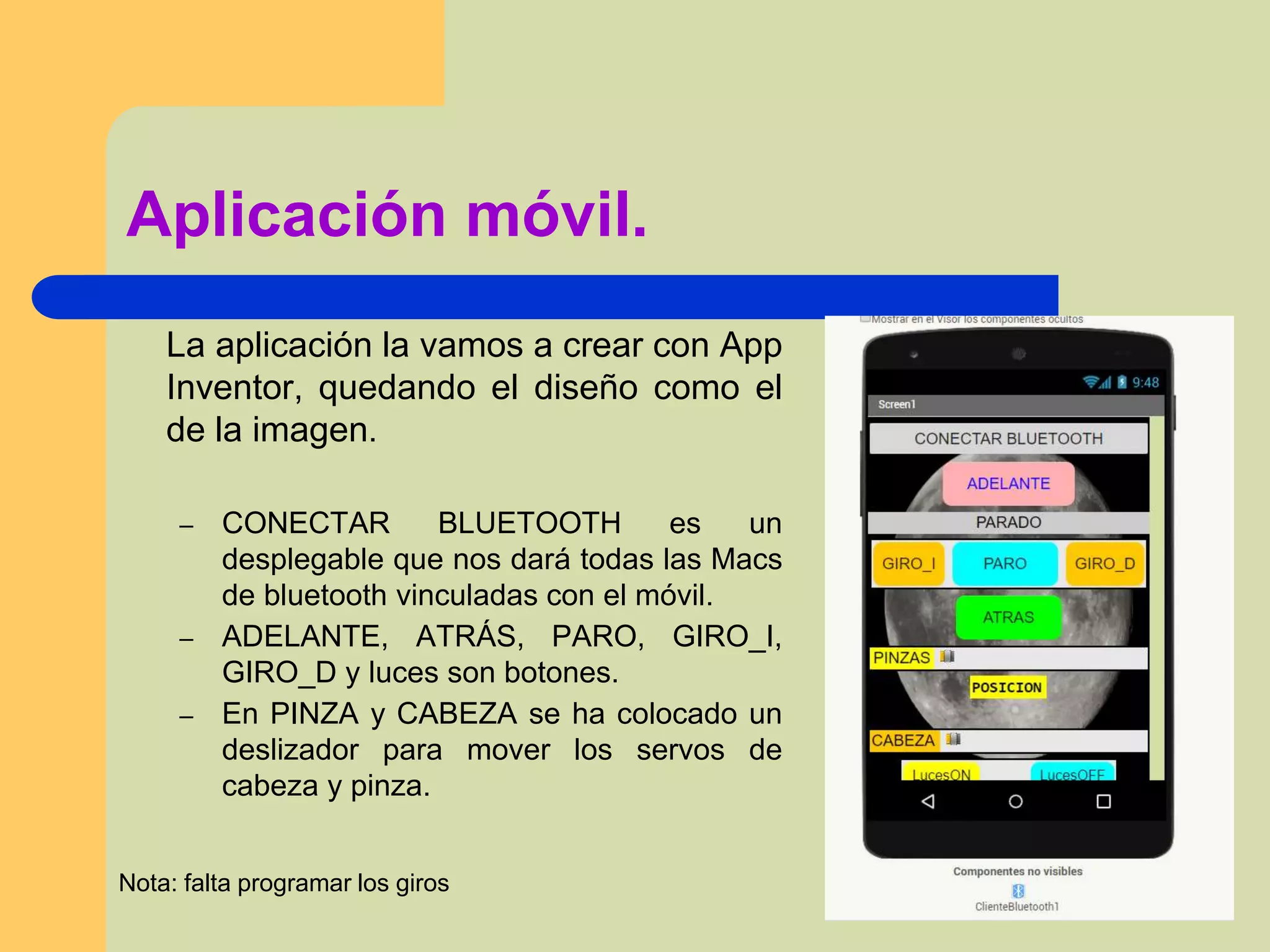
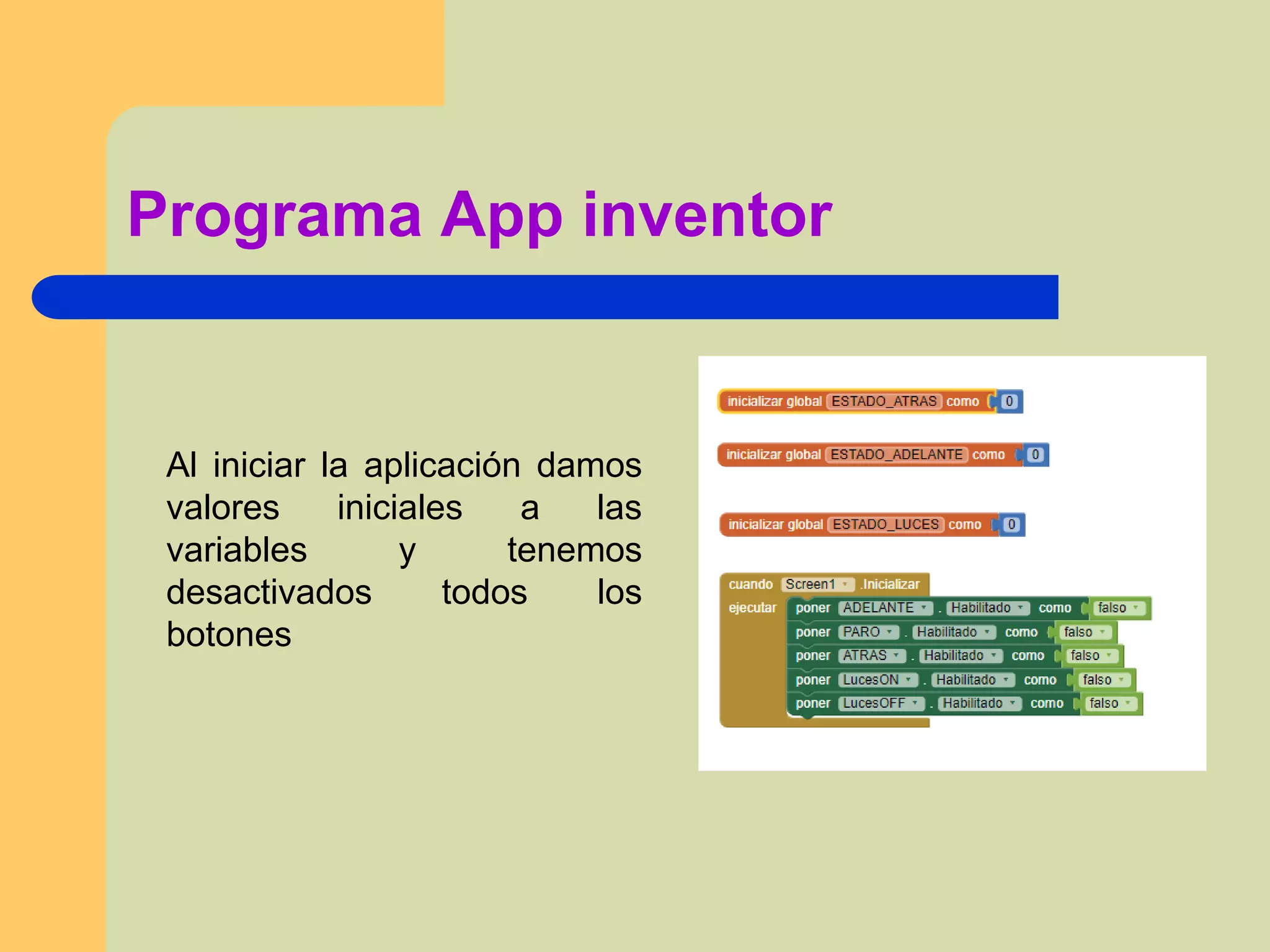
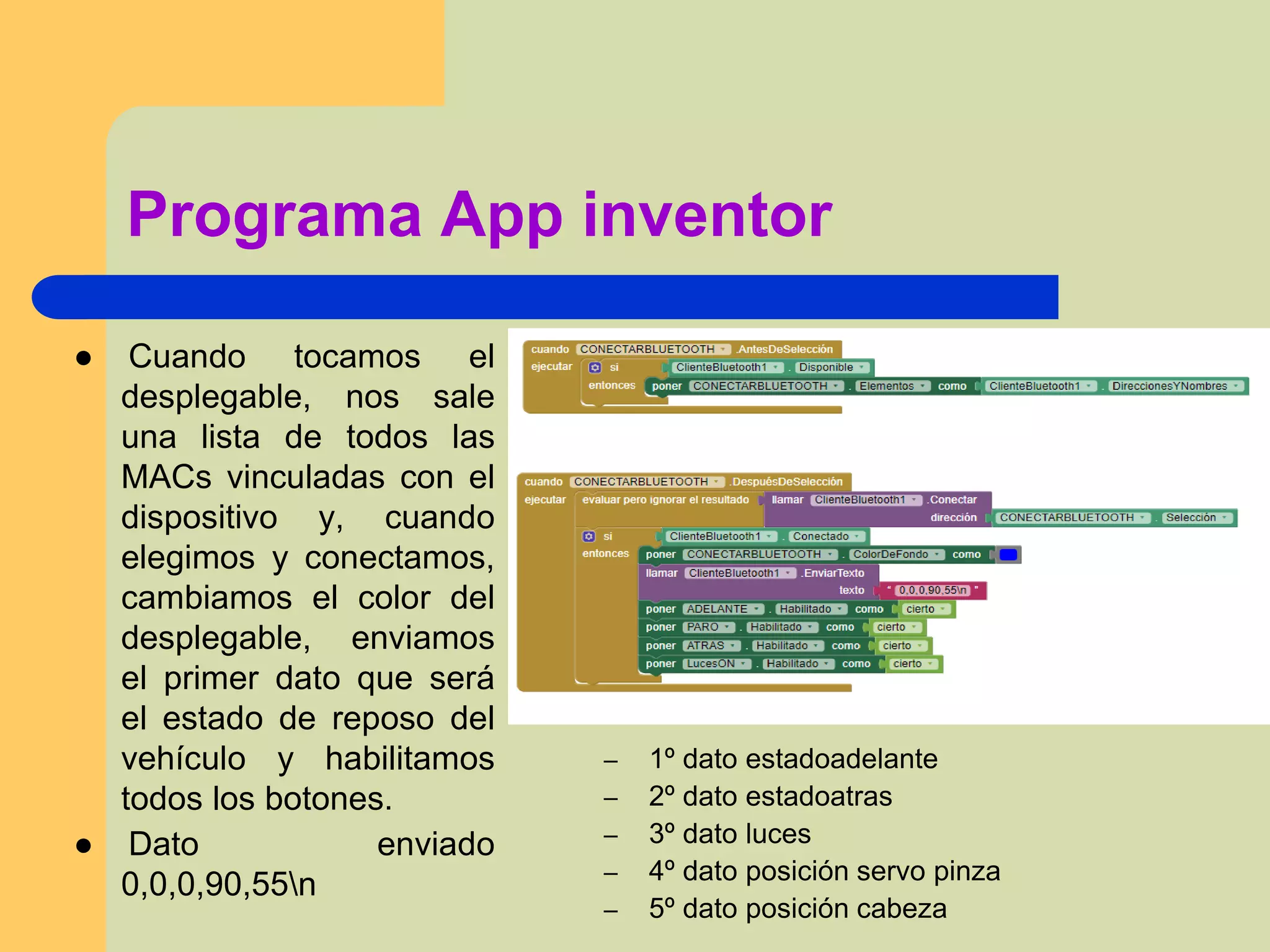
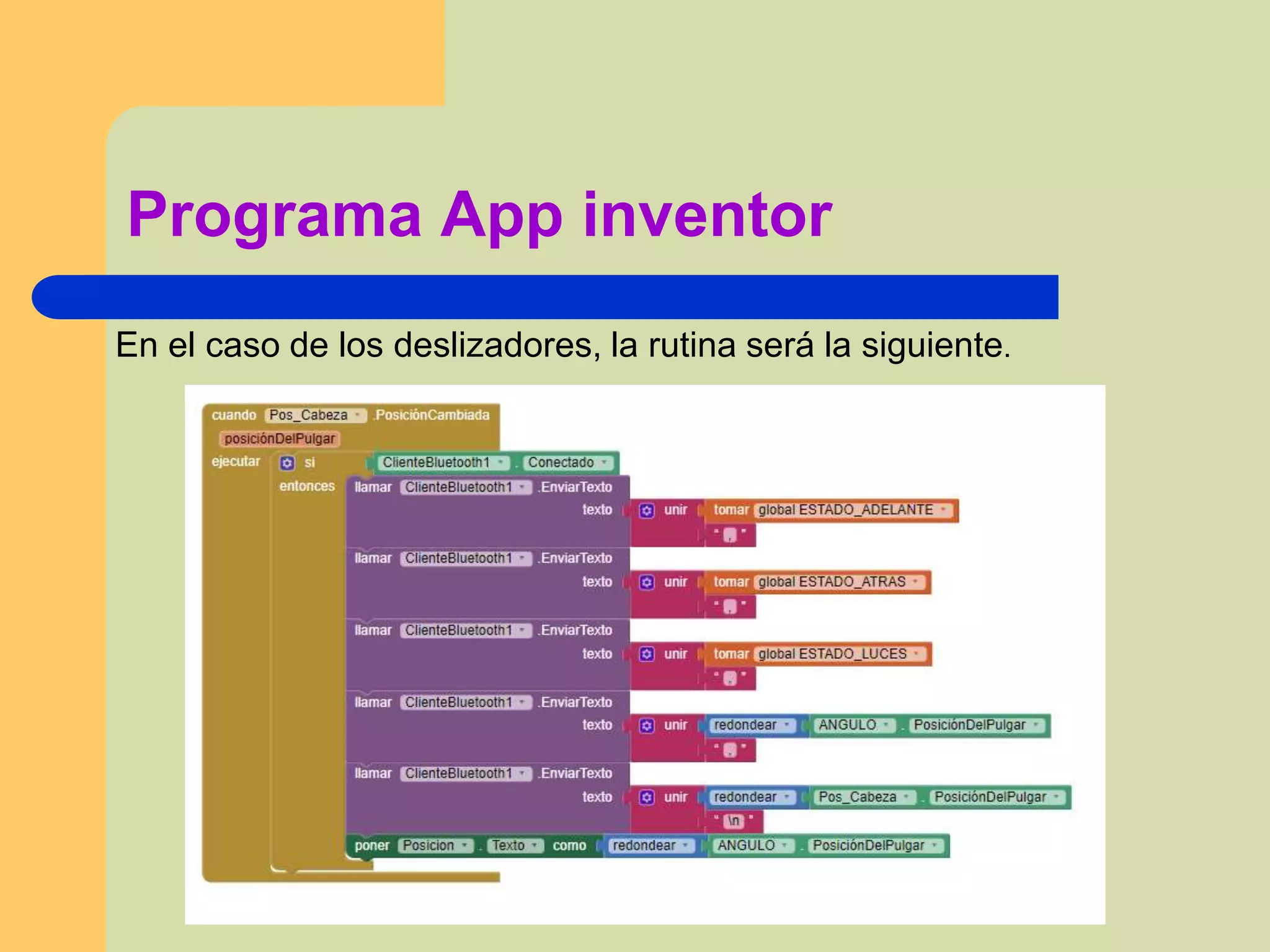
Diseño y funcionalidades de la aplicación móvil para el control del vehículo a través de Bluetooth.
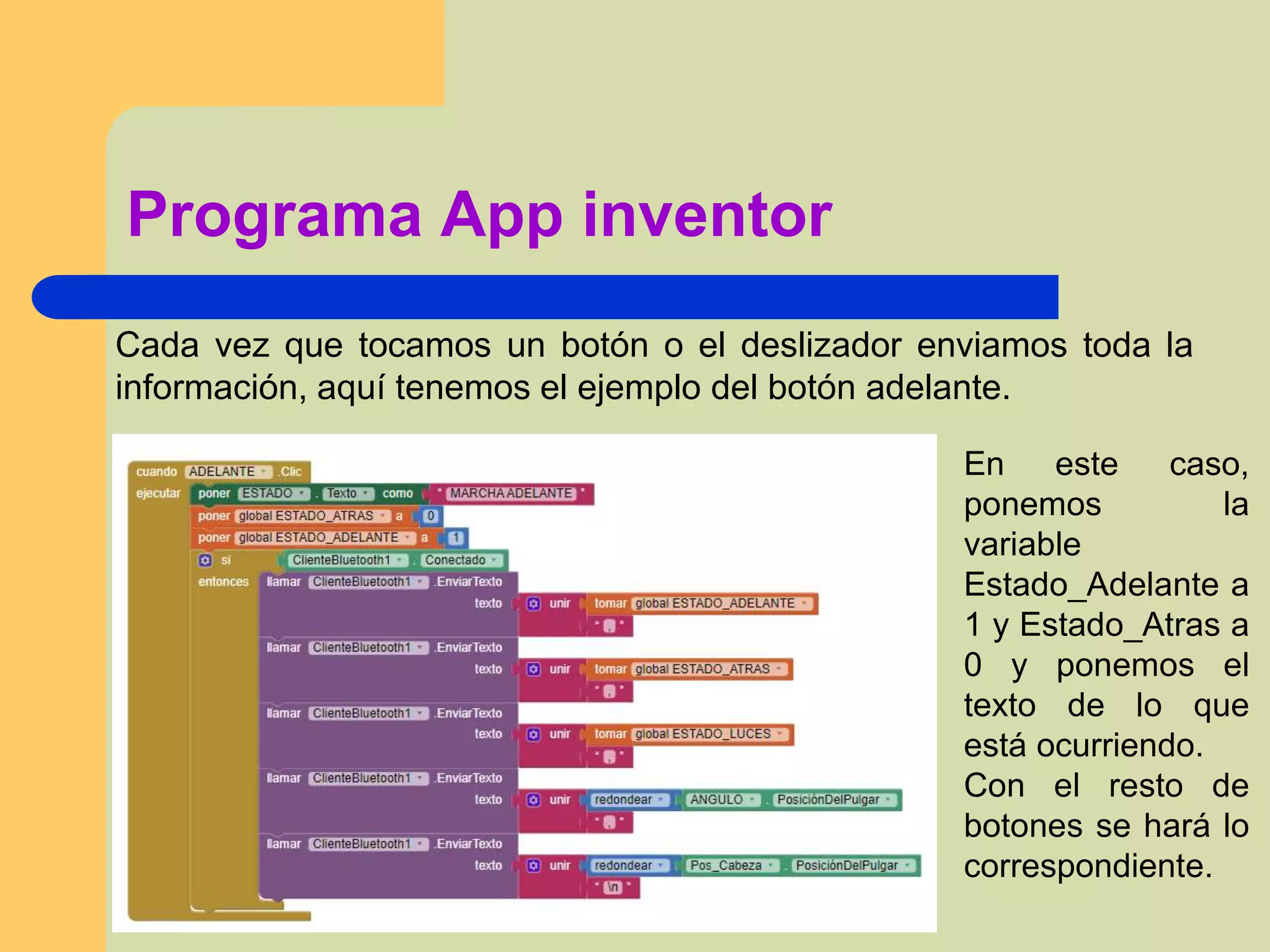
Manejo de interacciones en la aplicación y control de botones para el movimiento del vehículo.
Enlaces para descargar piezas 3D y recursos adicionales relacionados con el proyecto.











































































