Descargado 11 veces

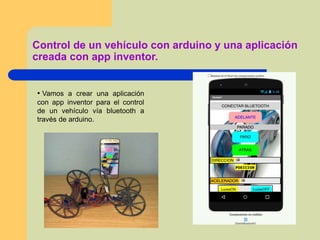


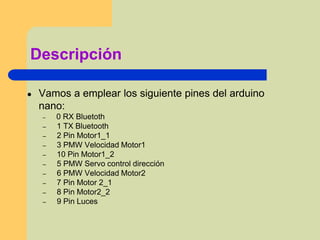
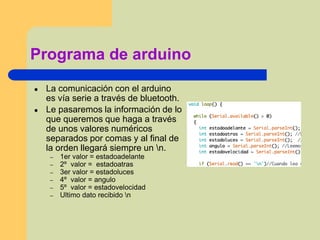
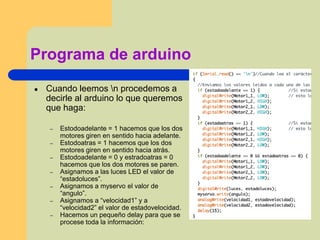


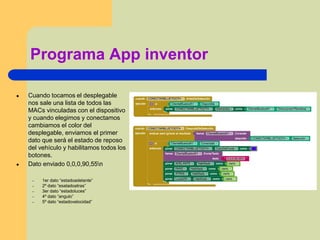

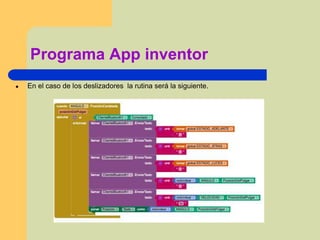

Este documento describe un proyecto para controlar un vehículo con ruedas mediante una aplicación móvil creada con App Inventor y un Arduino Nano. La aplicación permite controlar la dirección y velocidad del vehículo a través de botones y deslizadores, enviando las instrucciones al Arduino vía Bluetooth. El Arduino controla dos motores y luces LED siguiendo las órdenes recibidas de la aplicación móvil.























































































