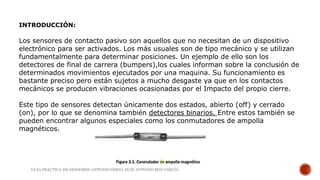
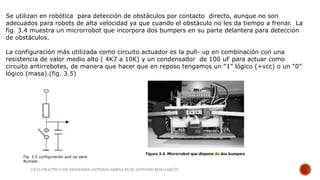
Los sensores de contacto pasivos detectan dos estados, abierto y cerrado, y se usan comúnmente como detectores de posición final. Un ejemplo es el detector de final de carrera (bumper), el cual informa sobre la conclusión de movimientos de una máquina. Los bumpers funcionan de manera binaria y precisa pero están sujetos a desgaste. Generalmente se usan en robótica para detección de obstáculos y su circuito típico es una configuración pull-up con una resistencia y condensador.