Descargar para leer sin conexión

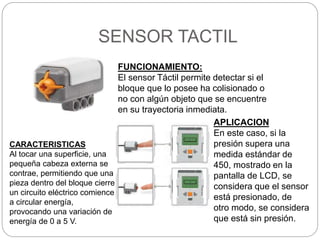
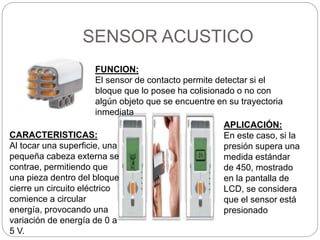
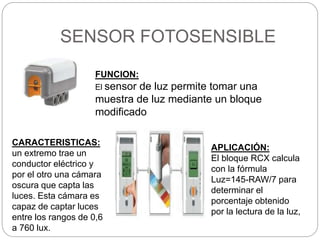


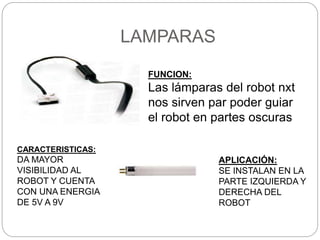


Este documento describe brevemente el funcionamiento y características de varios sensores y componentes utilizados en un robot, incluyendo sensores táctiles, acústicos, fotosensibles, ultrasónicos, servomotores, lámparas y Bluetooth. Cada sección explica la función principal del componente, sus características clave y posibles aplicaciones.


































































