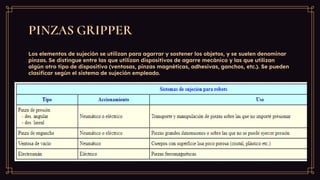
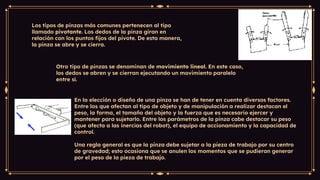
Este documento describe diferentes tipos de actuadores neumáticos y sus aplicaciones industriales. Explica que los actuadores neumáticos convierten la energía del aire comprimido en movimiento mecánico lineal o rotativo para automatizar procesos. Se detallan varios tipos de pinzas neumáticas, incluyendo pinzas mecánicas de dos o tres mordazas, y pinzas pivotantes o de movimiento lineal. También se discuten factores a considerar para seleccionar el tipo de pinza apropiado para una aplicación dada.