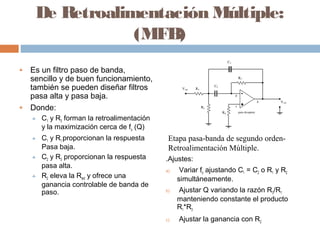
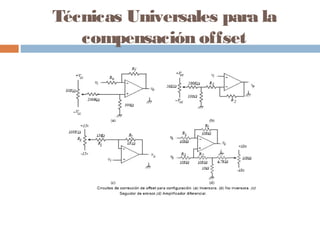
Este documento trata sobre los filtros activos. Explica que los filtros activos se componen de circuitos con amplificadores operacionales, resistores y condensadores. Describe varios tipos de filtros activos como el filtro Sallen-Key (VCVS), filtro de retroalimentación múltiple (MFB) y filtro de variable de estado. También presenta los procedimientos para diseñar estos filtros activos y calcular sus componentes.