Descargado 92 veces




![Dado que el filtro es estable, los polos en el semiplano izquierdo
pertenecen a AV(s) (que se toman en cuenta para el diseño del filtro) y los polos
del semiplano derecho a AV(-S)
Calculo del orden de un filtro:
Una consideración importante en el diseño de un filtro Butterworth es la
determinación del orden apropiado. Se debe de obtener el orden N de tal manera
que se alcancen o superen las magnitudes de las señales deseadas a las
frecuencias especificadas. De esta manera el orden de un filtro puede obtenerse
utilizando la siguiente ecuación:
Donde:
Af es la ganancia en la banda de paso
δ2 es la ganancia de la respuesta a una frecuencia deseada
ωH es la frecuencia de corte a 3 db (en radianes)
ωa es la frecuencia deseada a la ganancia δ2
Gráficas de un filtro pasa bajas de primer orden con octave
El código fuente para generar el diagrama de bode es:
num = 1
den = [1 1]
sys1 = tf2sys(num,den) // En matlab solo TF
bode(sys1)](https://image.slidesharecdn.com/practica1-120828095957-phpapp01/85/Practica-1-Laboratorio-Telecomunicaciones-I-6-320.jpg)

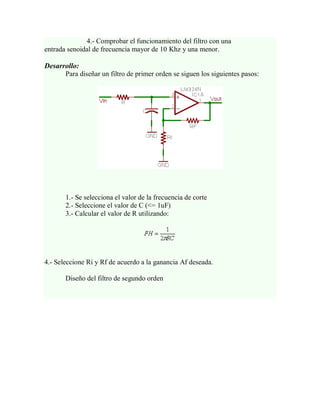


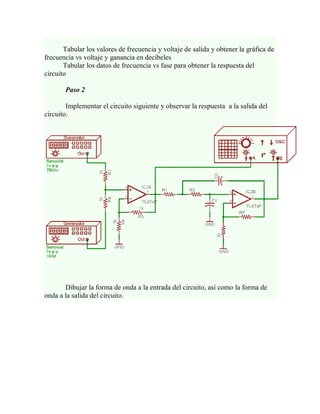

Este documento describe el diseño y simulación de un filtro pasa bajas Butterworth. Explica que los filtros activos mejoran la función de filtrado utilizando amplificadores operacionales. Luego, detalla el diseño de un filtro pasa bajas de primer y segundo orden, incluyendo el cálculo de los componentes y la comprobación de la respuesta en frecuencia mediante simulaciones. El objetivo es diseñar un filtro pasa bajas con -3dB a 10kHz y -15dB a 50kHz.



































































