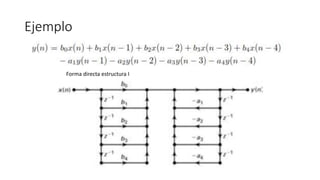
Los filtros digitales se usan para separar o restaurar señales. Existen dos tipos principales: FIR e IIR. Los FIR usan convolución y tienen respuesta al impulso finita, mientras que los IIR usan ecuaciones recursivas y tienen respuesta al impulso infinita. Ambos tipos pueden implementarse en el dominio del tiempo o la frecuencia y tener diferentes estructuras como directa, cascada o paralela.