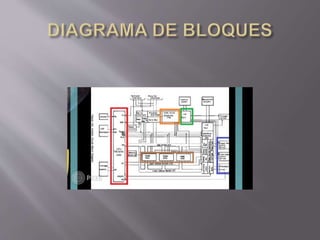
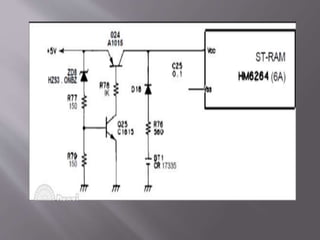
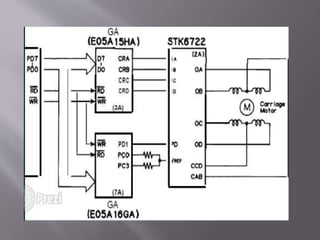
Este documento describe los componentes y funcionamiento de una impresora matricial, incluyendo sensores ópticos y de efecto Hall, el diagrama de bloques con el chip controlador PD781, y el diagrama electrónico con componentes como el chip de memoria RAM HM6264B. Explica cómo el motor del carro es controlado por puertas lógicas para imprimir una matriz de puntos.































































![Sensores 2003[1]](https://cdn.slidesharecdn.com/ss_thumbnails/sensores20031-110325214823-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)







