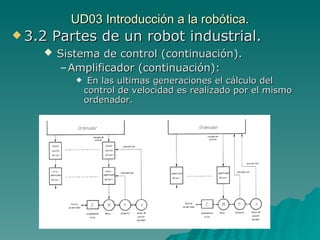
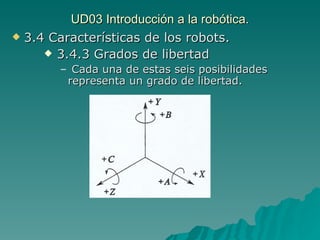
Este documento presenta una introducción a la robótica, definiendo qué es un robot y sus principales aplicaciones industriales. Explica las partes de un robot industrial, incluyendo su estructura mecánica articulada, el sistema de control y las clasificaciones más comunes de robots. También describe las características clave de los robots como el espacio de trabajo, grados de libertad, precisión, velocidad y capacidad de carga.