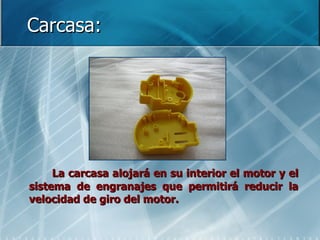
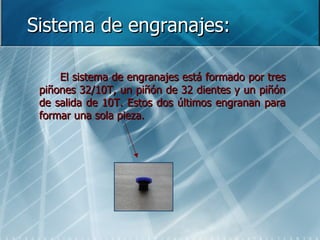
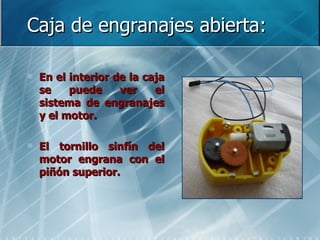
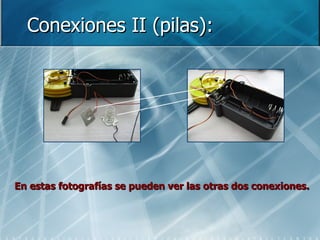
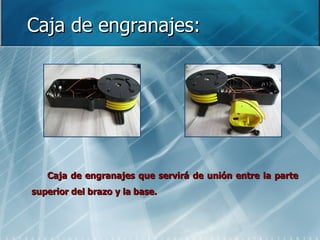
El documento describe las partes y especificaciones del brazo robot Velleman KSR 10, un brazo robótico de 5 grados de libertad controlado manualmente mediante una unidad de control. Tiene una base giratoria, codo y muñeca móviles, una mano funcional y un LED para manipulación nocturna. Sus especificaciones incluyen una capacidad de elevación máxima de 100gr, alimentación por 4 pilas LR20C y una altura máxima extendida de 38cm. Explica detalladamente cada una de sus partes mecánicas como