Descargado 69 veces
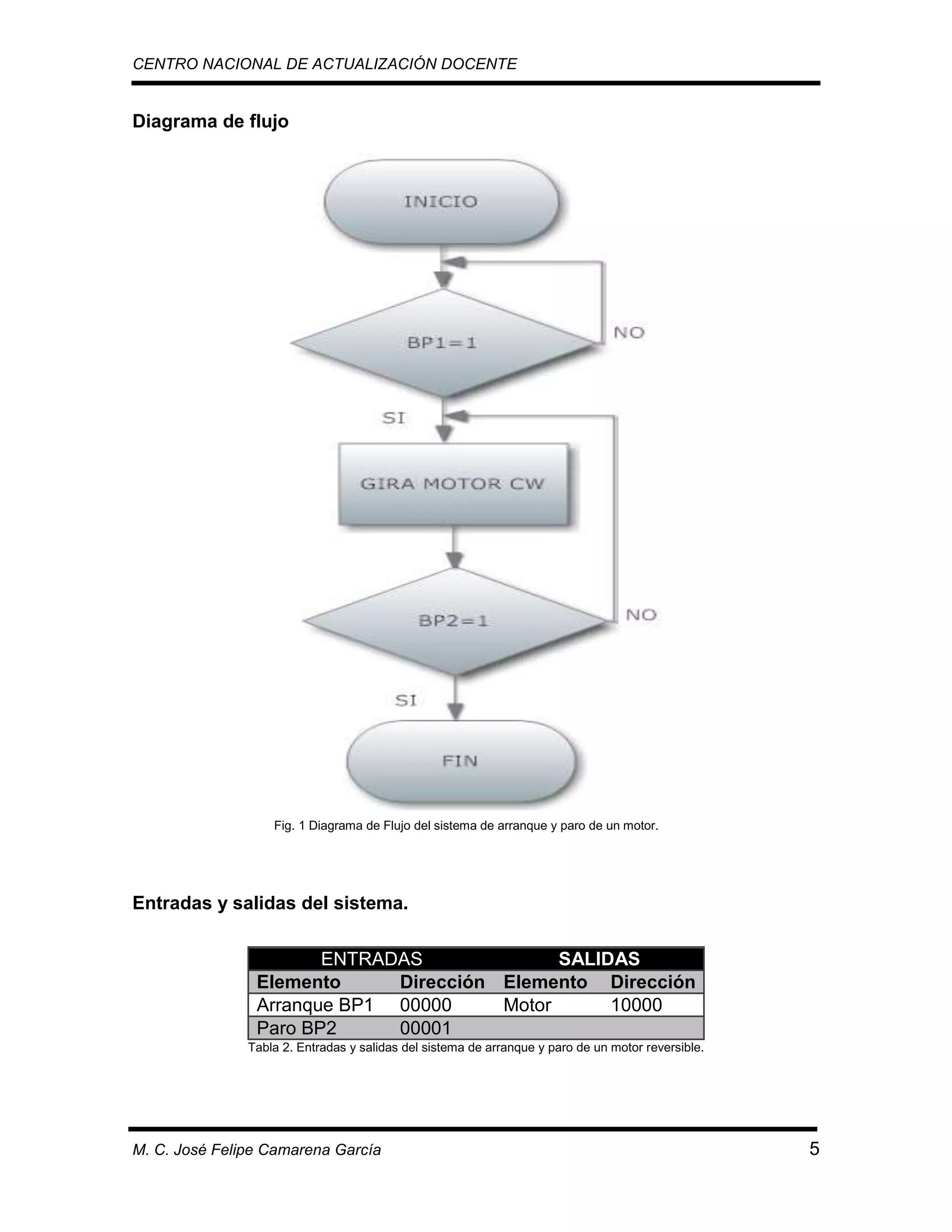
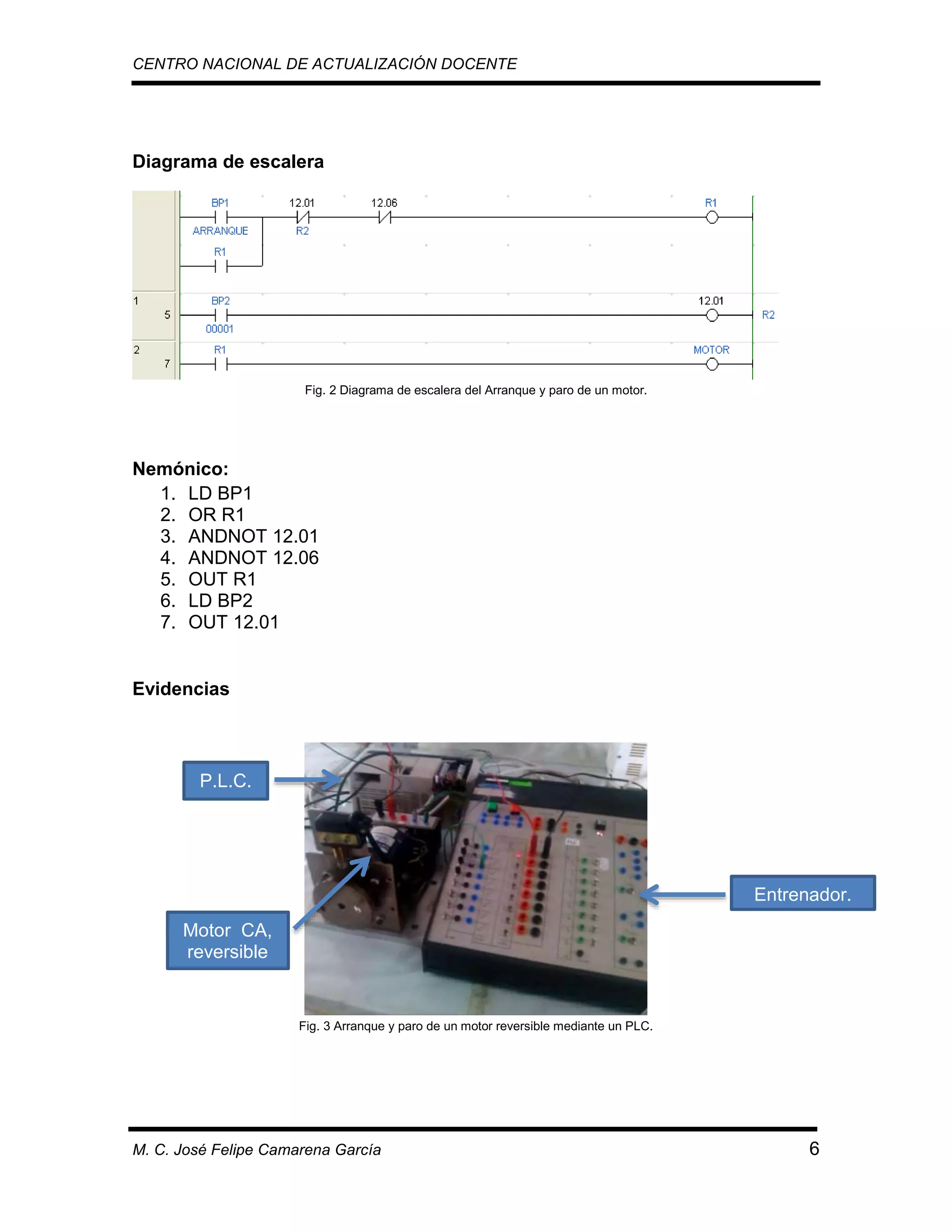

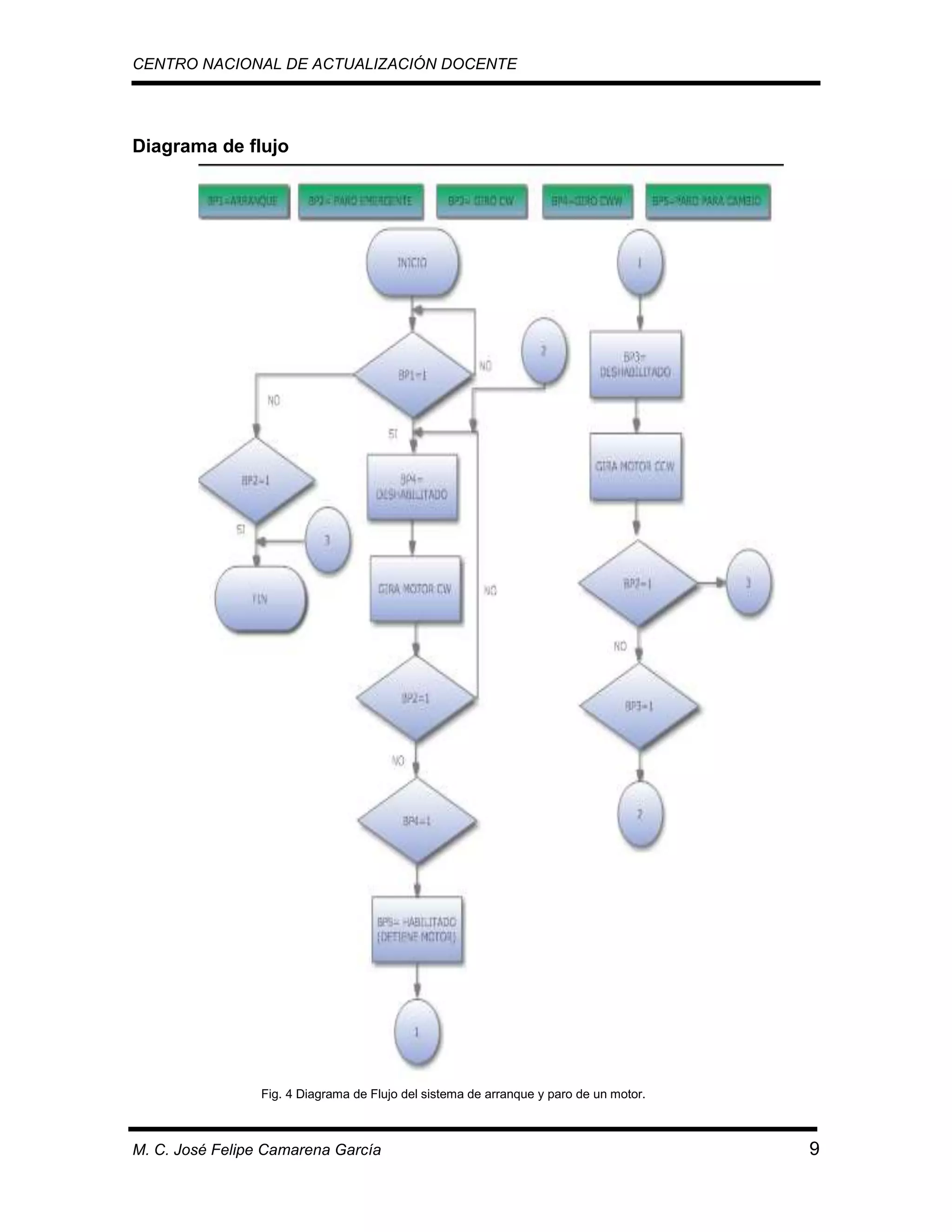
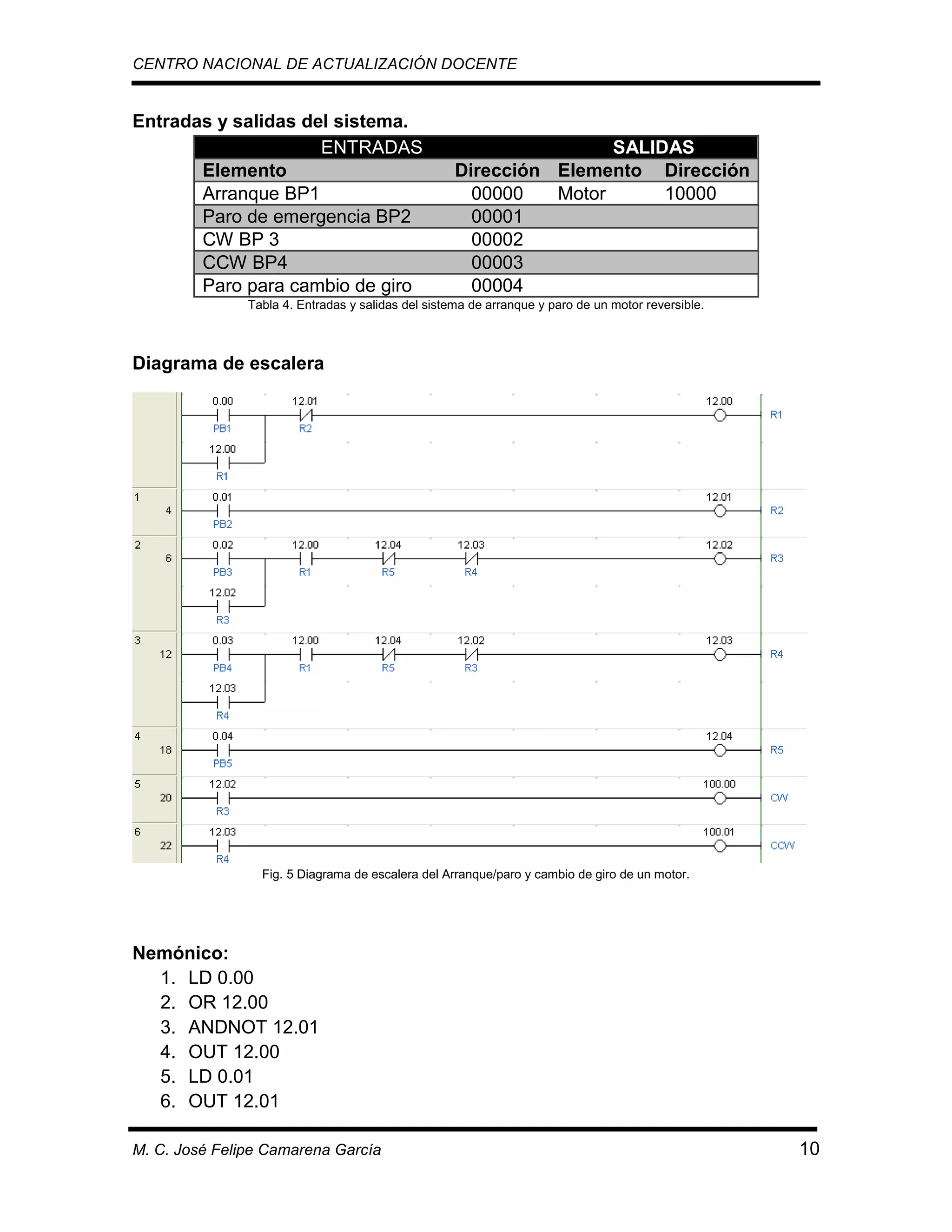
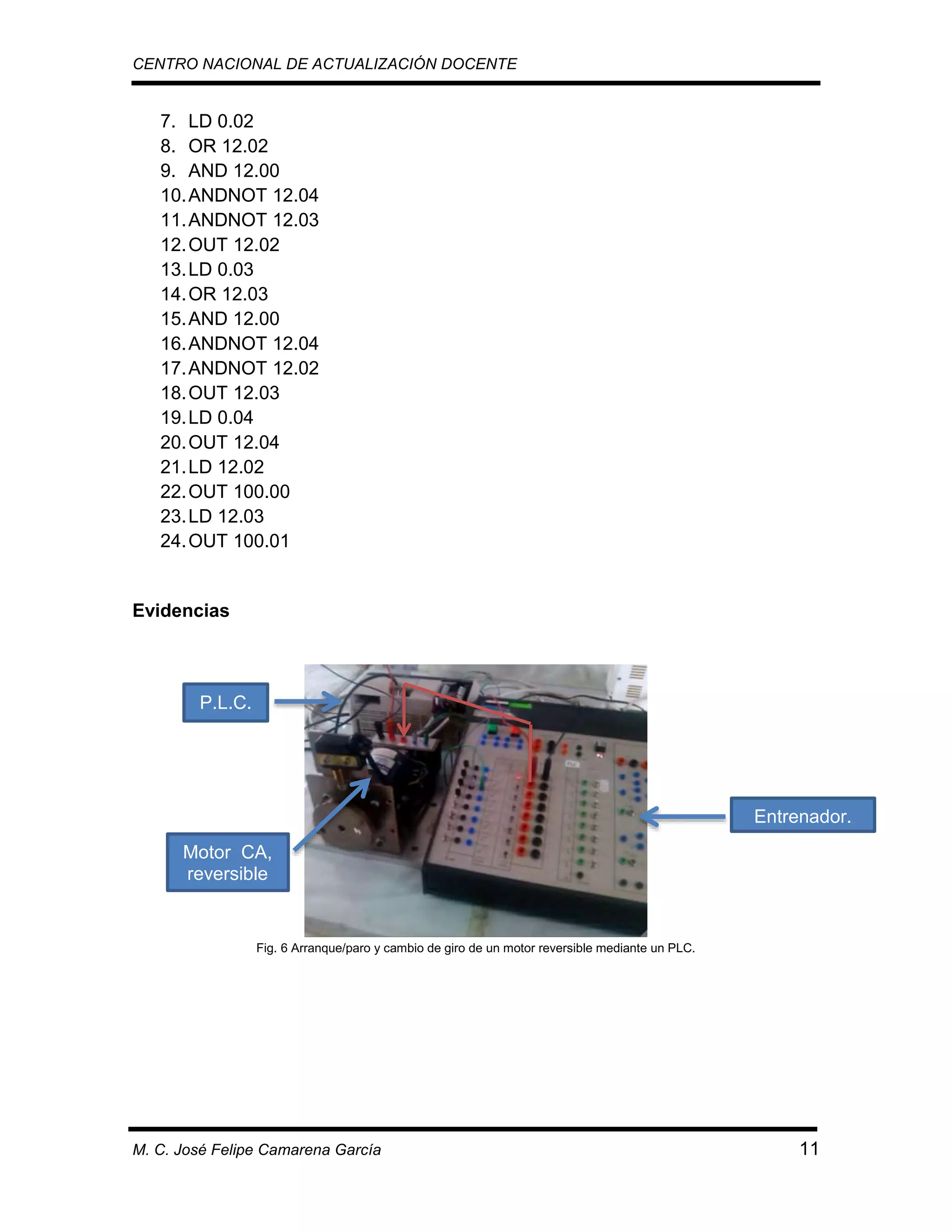
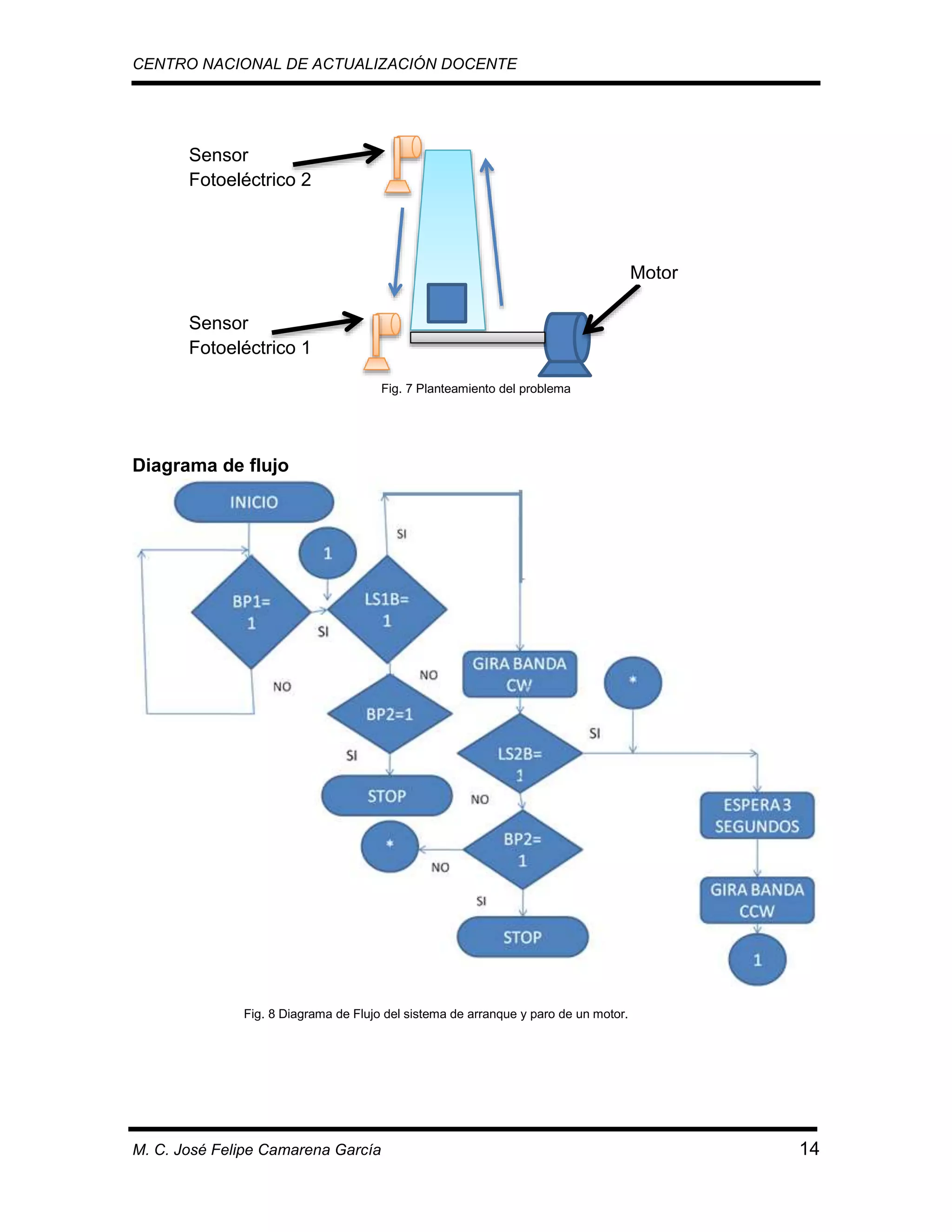
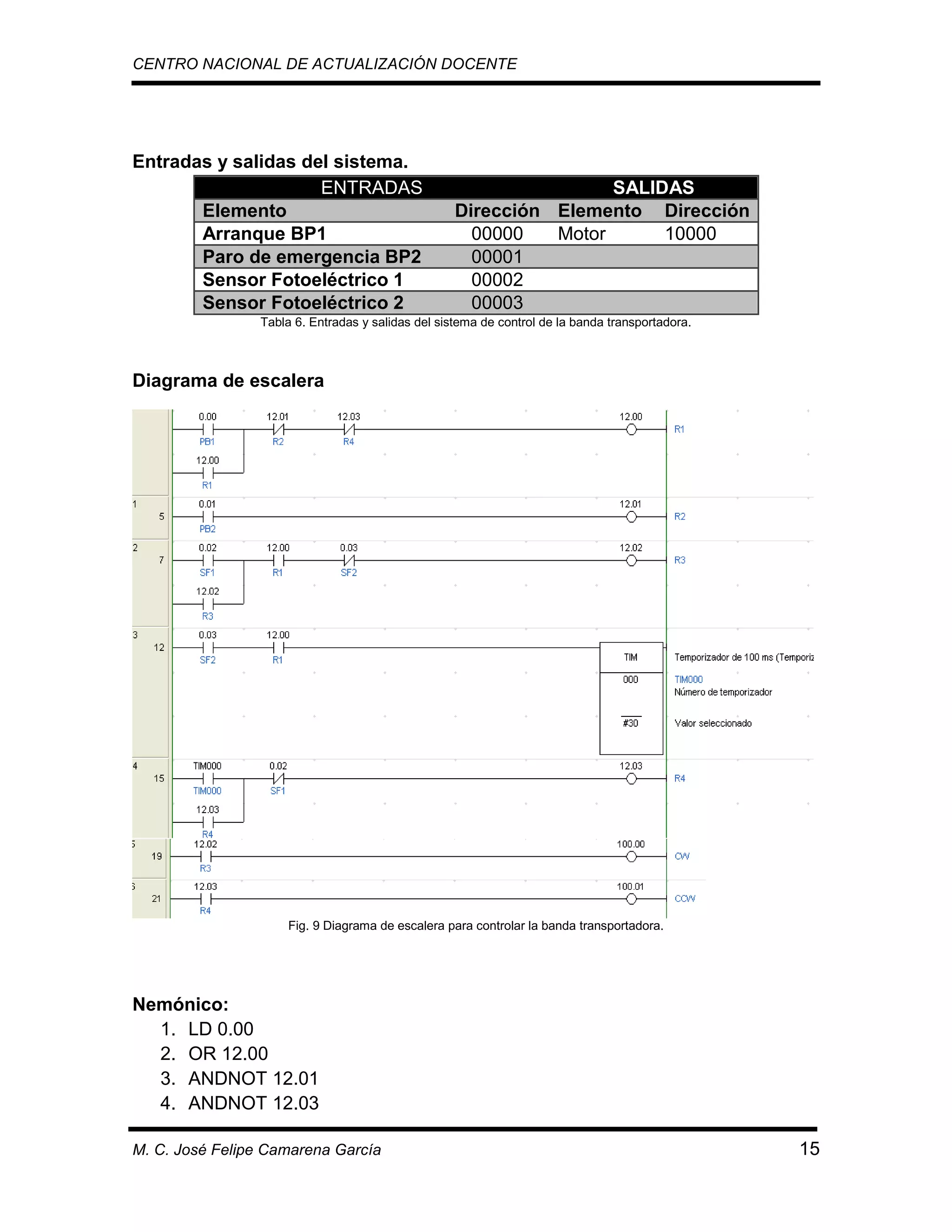
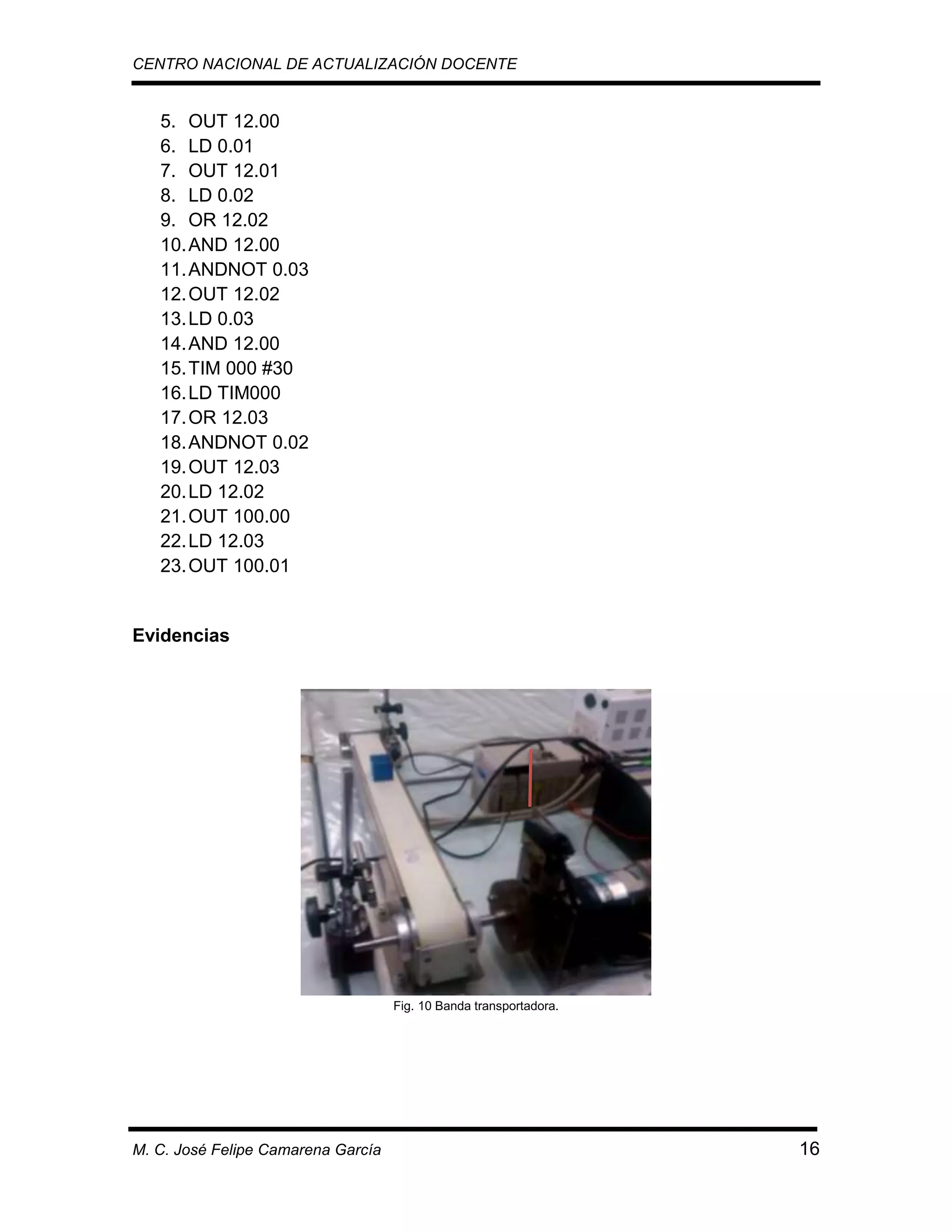
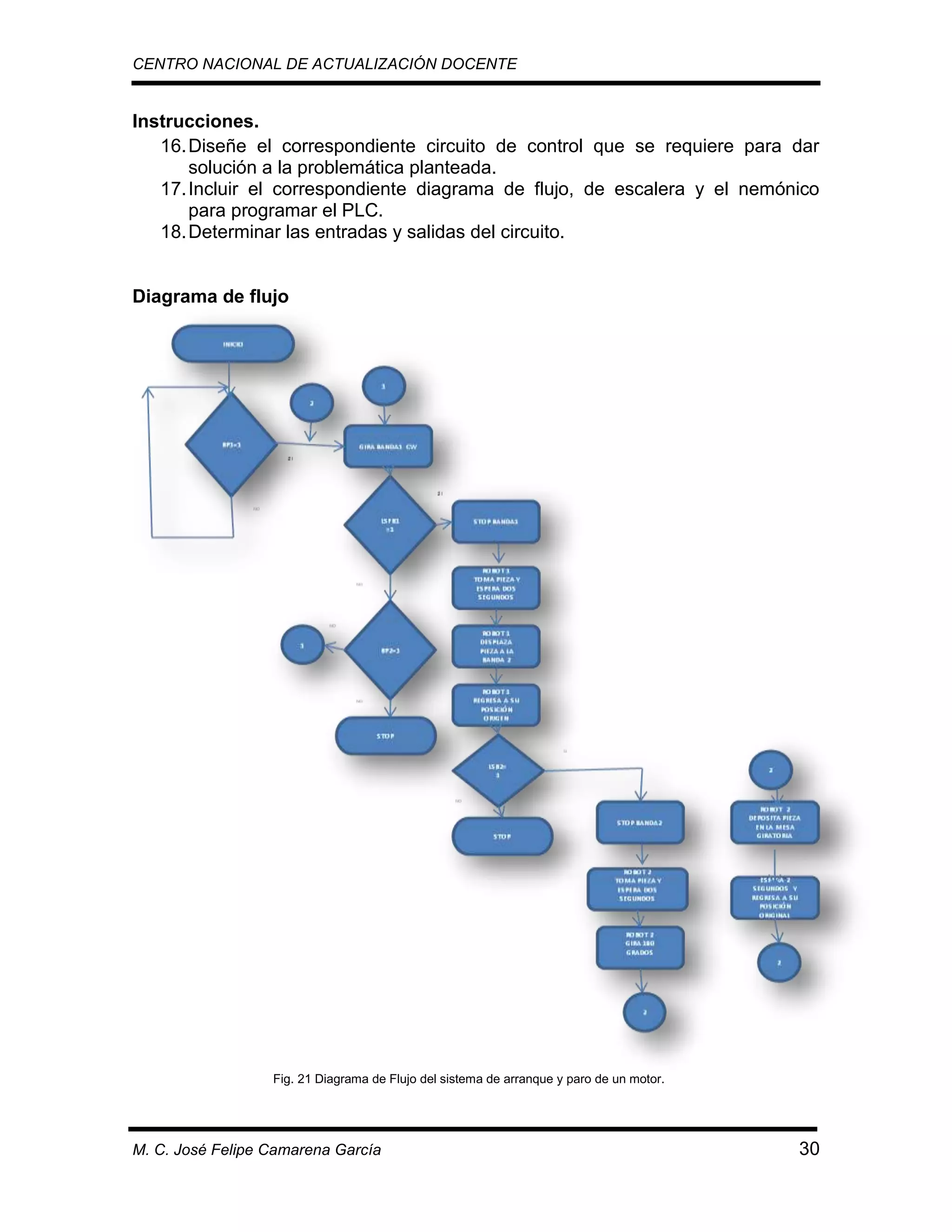
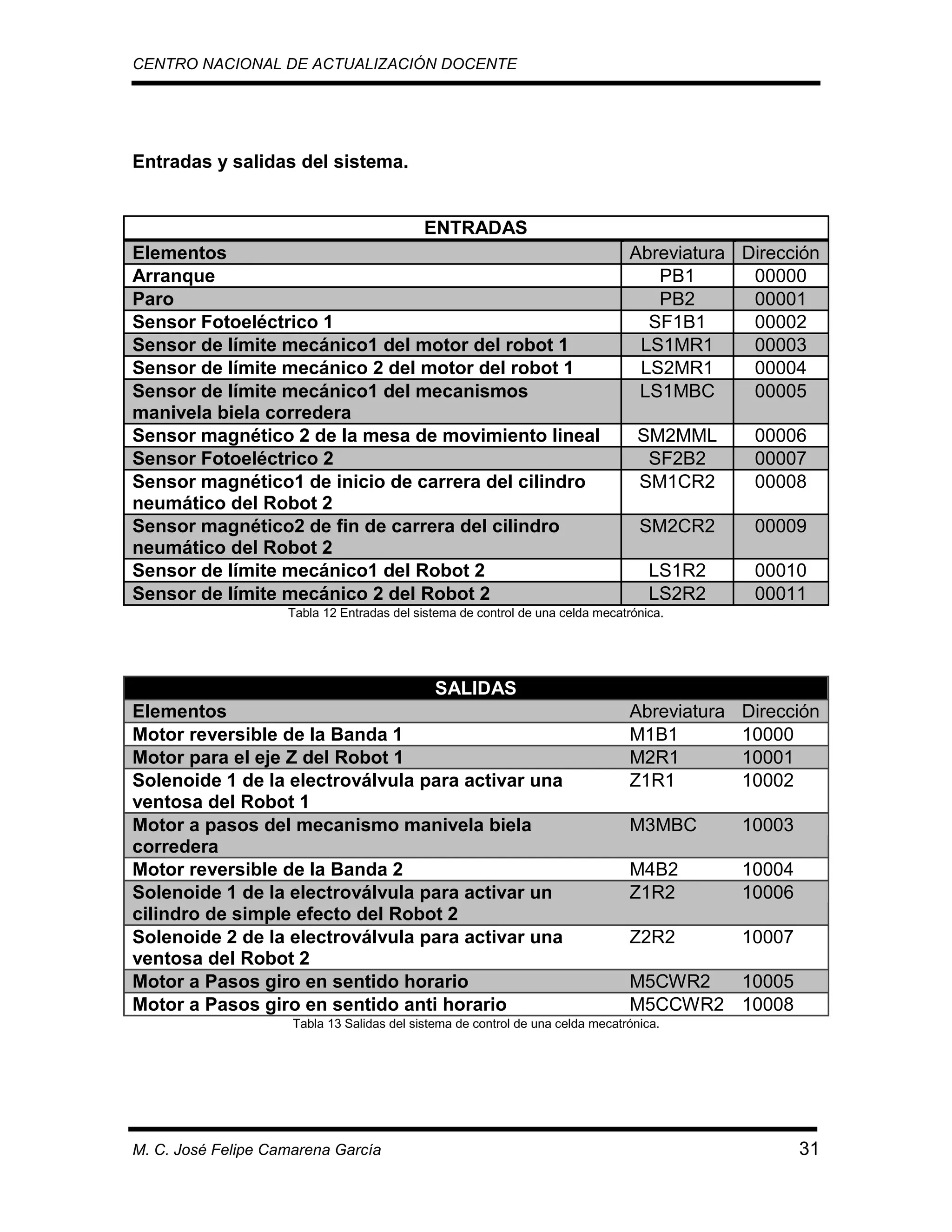
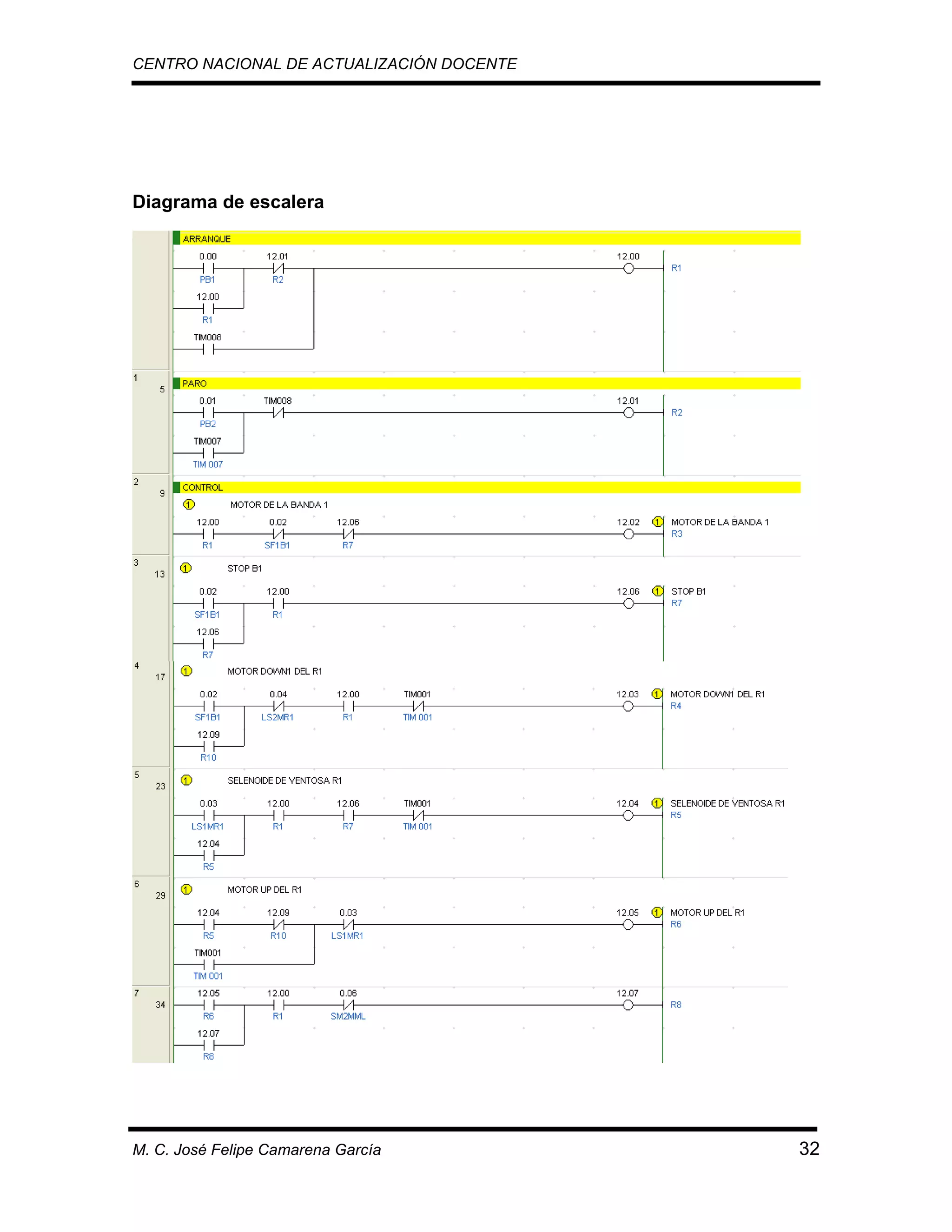
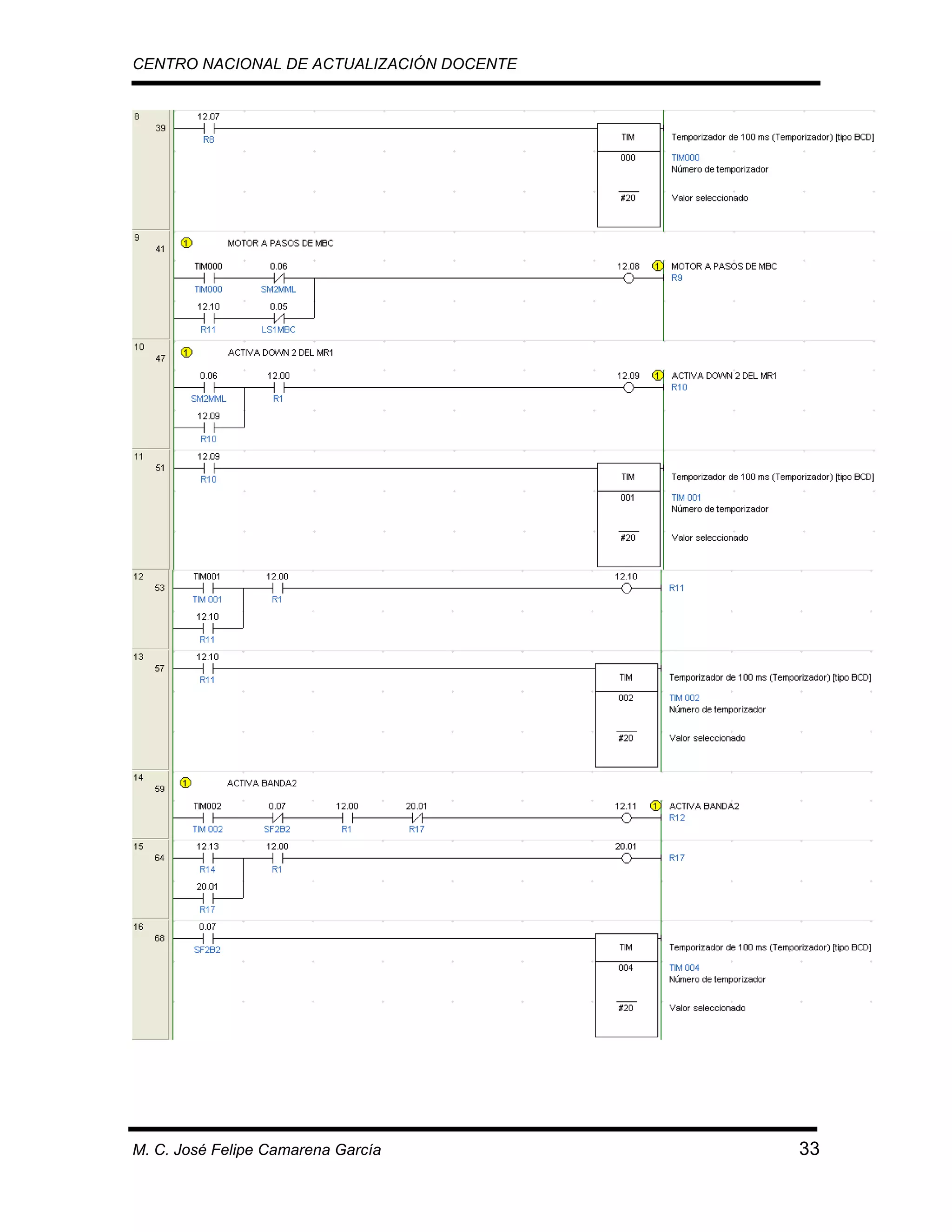
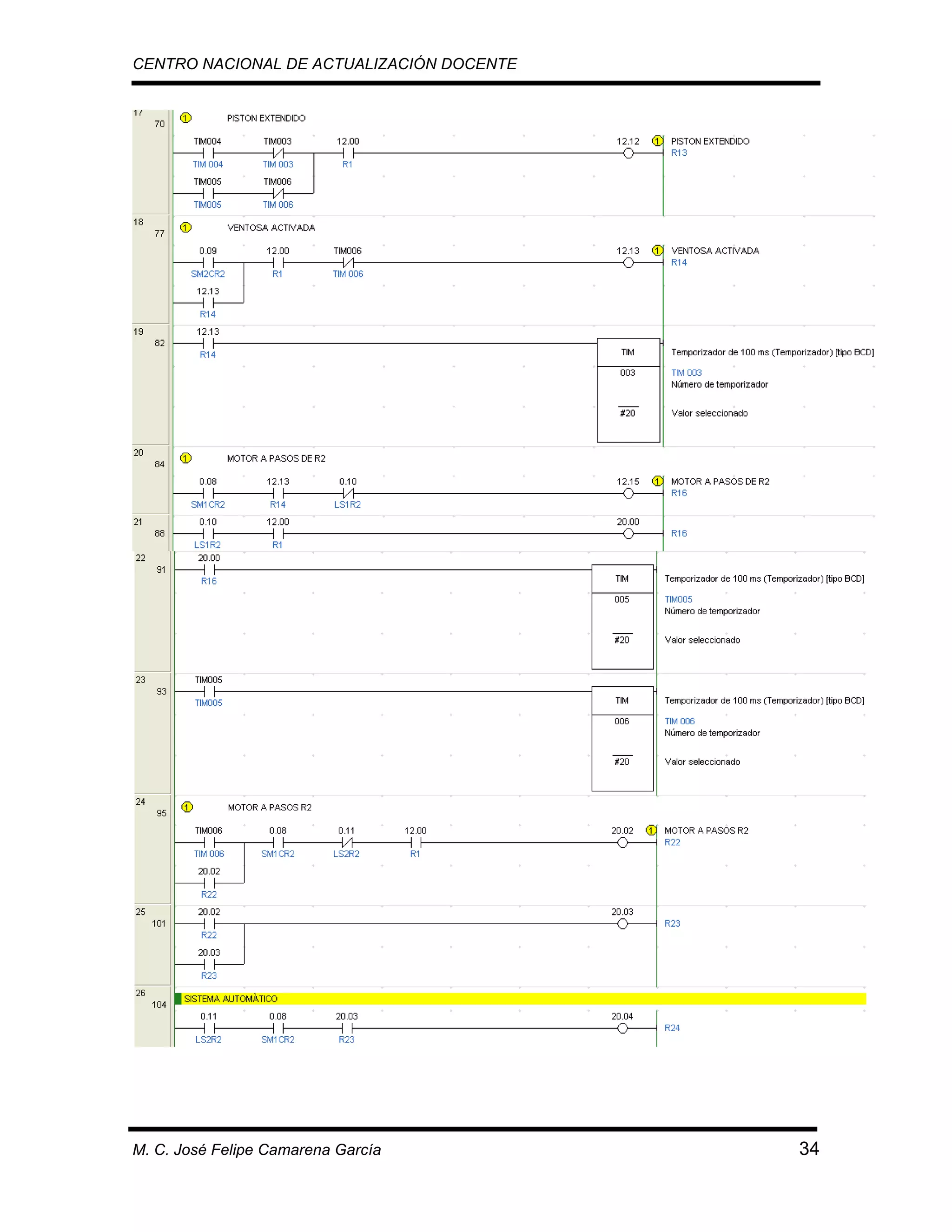

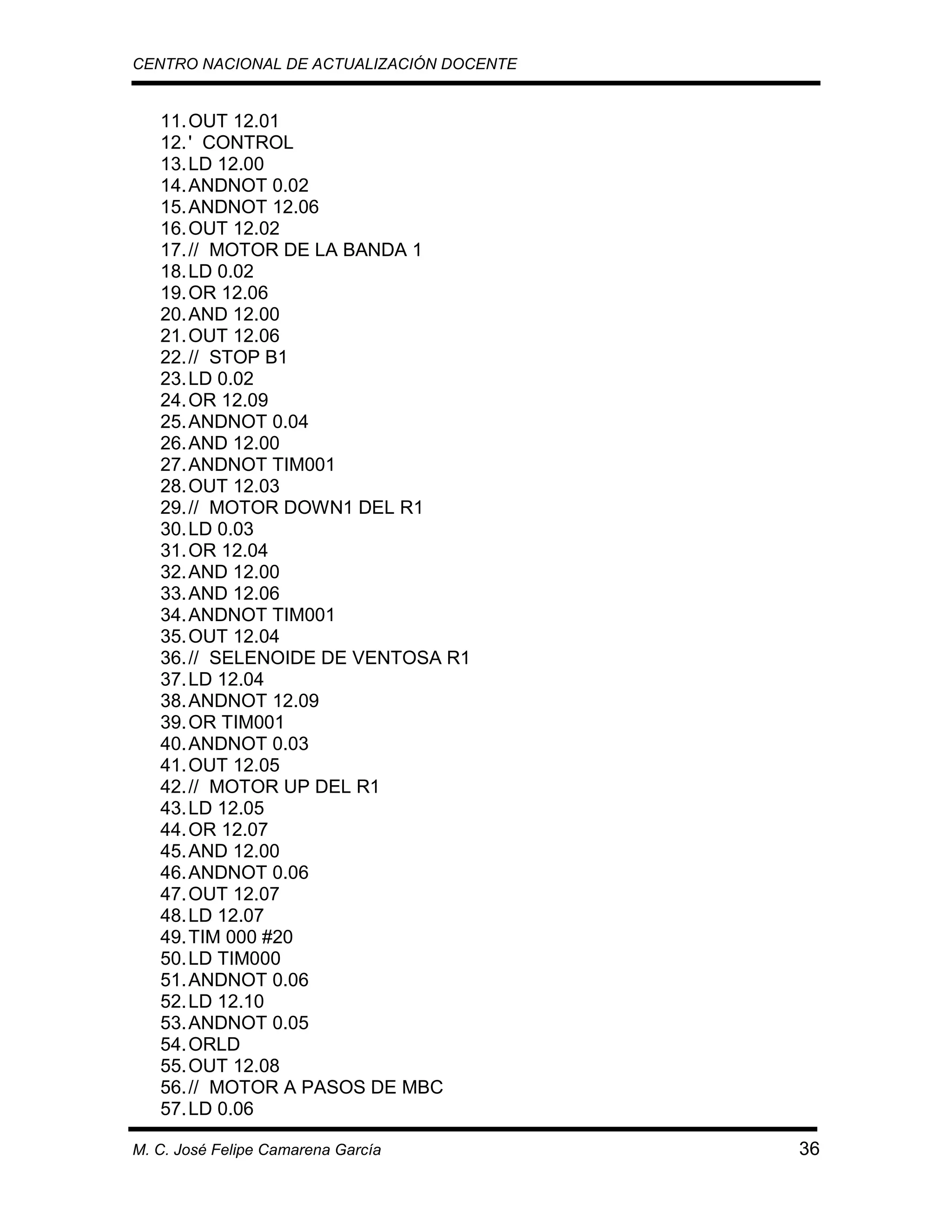
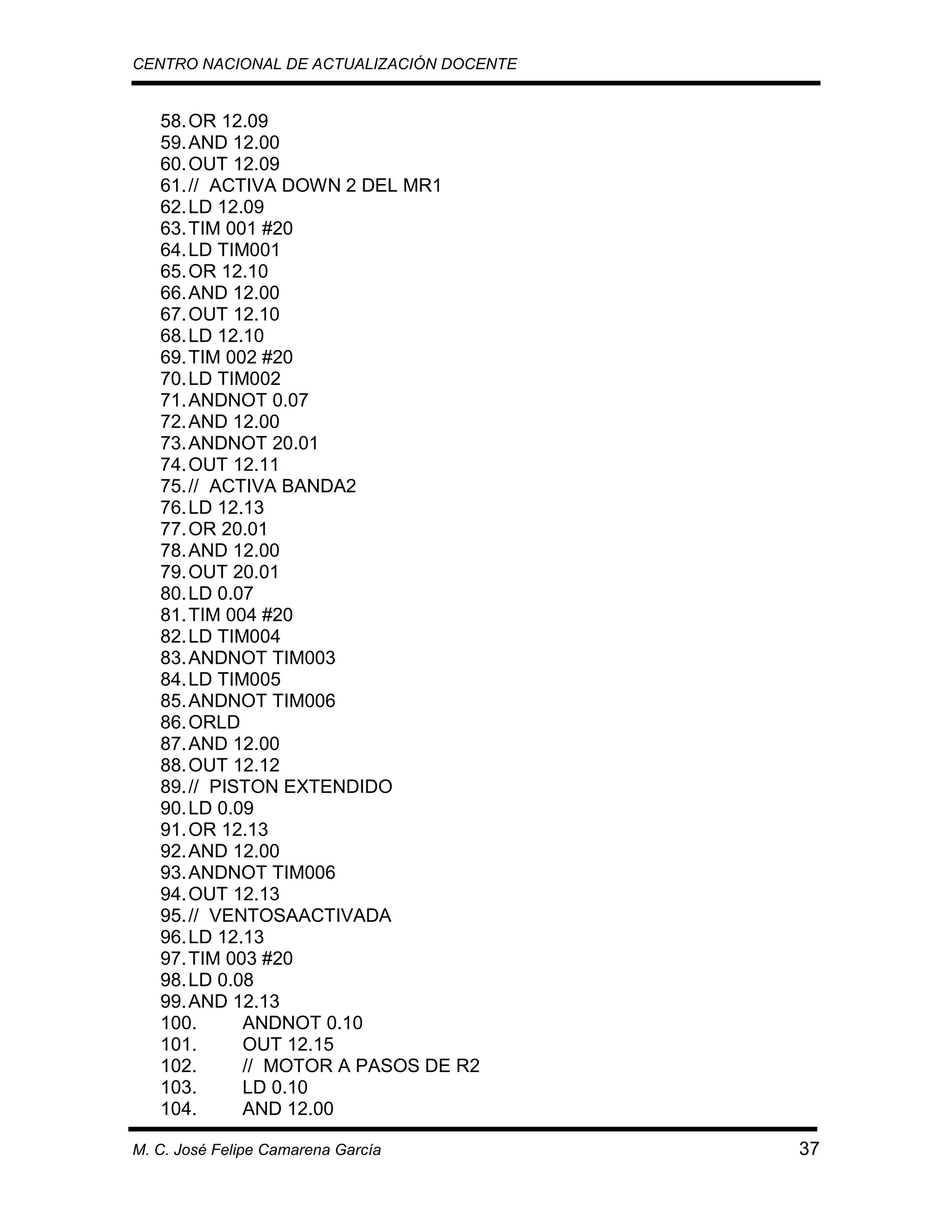
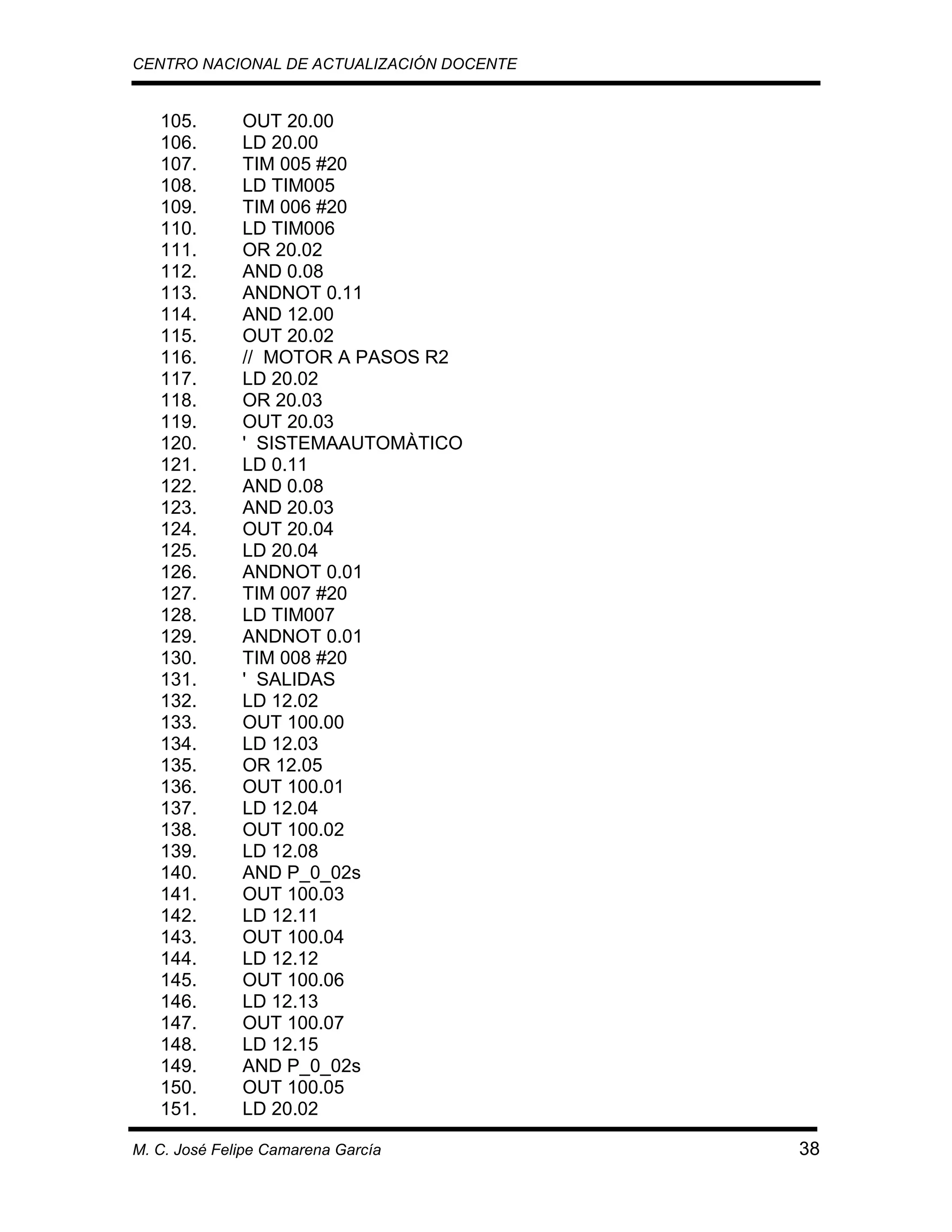


El documento es un manual de prácticas del Centro Nacional de Actualización Docente que abarca el diseño y control de motores eléctricos y bandas transportadoras utilizando un PLC de marca Omron. Incluye diversas prácticas detalladas, cada una con objetivos, materiales, planteamientos, instrucciones, diagramas de flujo, entradas y salidas del sistema, así como conclusiones sobre su funcionamiento. Las prácticas están enfocadas en el arranque, paro y cambio de giro de motores eléctricos, así como el control de bandas transportadoras en sistemas automatizados.
















































![Practicas+reles[1]](https://cdn.slidesharecdn.com/ss_thumbnails/practicasreles1-110516141102-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






































