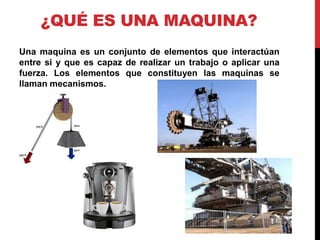
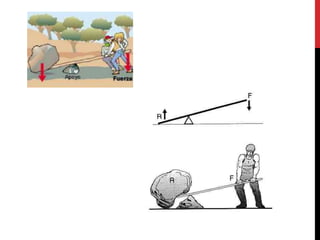
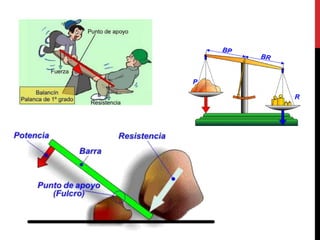
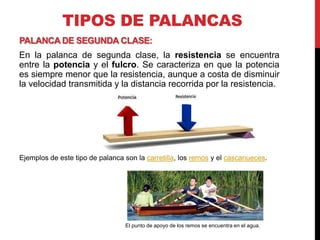
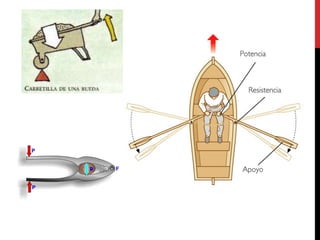
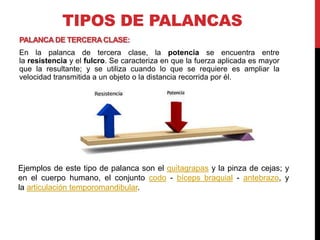
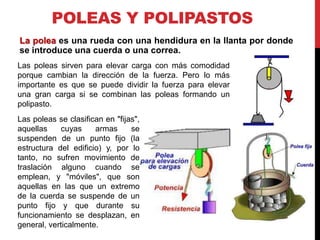
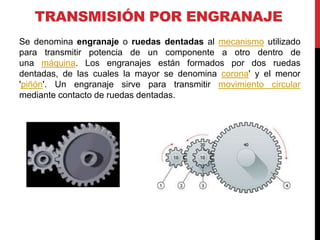
Este documento describe diferentes tipos de máquinas y mecanismos, incluyendo palancas, poleas, engranajes, correas y cadenas. Explica cómo las palancas se clasifican en tres órdenes dependiendo de la posición del punto de apoyo y las fuerzas involucradas. También describe cómo las poleas y los polipastos pueden usarse para dividir una fuerza. Finalmente, explica varios mecanismos de transmisión como engranajes, correas, cadenas y tornillos sin fin, así como cómo estos se pueden combinar en





































![Formato módulo de entorno del comercio exterior[1]](https://cdn.slidesharecdn.com/ss_thumbnails/formatomdulodeentornodelcomercioexterior1-120829131210-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)















































