























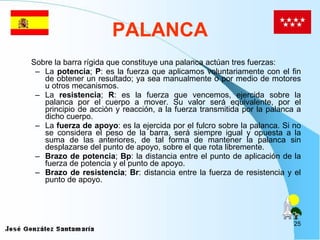

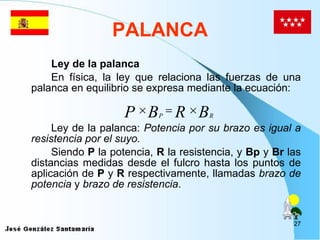








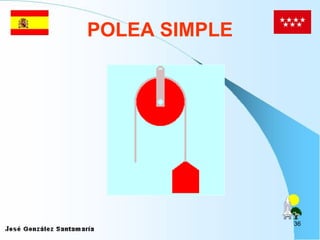


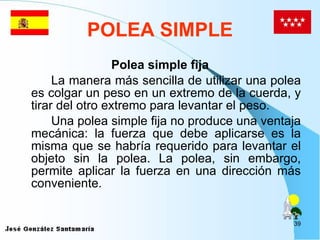














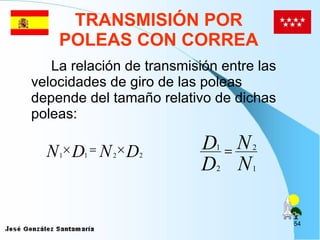




























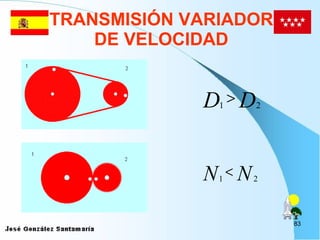



















































































Este documento habla sobre máquinas simples y mecanismos. Define máquinas simples como objetos compuestos por un solo operador tecnológico diseñado para realizar un trabajo determinado, como una cuña o una palanca. Explica que los mecanismos transmiten y transforman fuerzas y movimientos para realizar tareas con mayor comodidad. Luego describe varias máquinas simples comunes como el plano inclinado, la cuña y el tornillo, y explica cómo funcionan. Finalmente clasifica los diferentes tipos de mecanismos.

















































































