Descargado 23 veces
















































![2.3. COLISIONES EN UNA DIMENSI ´ON: 49
2.3. Colisiones en una dimensi´on:
2.3.1. Colisiones el´asticas:
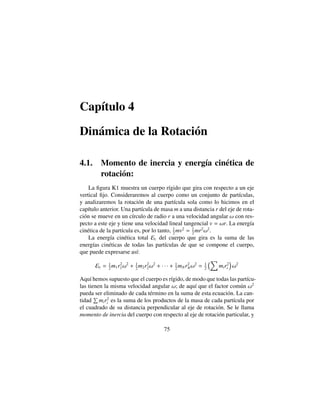
Una colisi´on es el´astica si se conserva el momentum y la energ´ıa cin´eti-
ca. Consideremos el casao de una colisi´on el´astica de dos part´ıculas (Figura
I10)
Figura 2.4: Figura I10
Las masas de las part´ıculas en colisi´on son m1 y m2, siendo las compo-
nentes de la velocidad v1i y v2i antes de la colisi´on y v1 f y v2f despu´es de la
colisi´on. [En nuestra notaci´on, los sub´ındices num´ericos 1 y 2 especifican
la part´ıcula, mientras que los sub´ındices i y f se refieren, respectivamente,
a los valores iniciales (antes de la colisi´on) y a los valores finales (des-
pu´es de la colisi´on).] Tomamos la direcci´on positiva del momentum y la
velocidad hacia la derecha en la figura I10. Suponemos, a no ser que es-
pecifiquemos lo contrario, que las velocidades de las part´ıculas en colisi´on
sean lo suficientemente bajas como para que no necesitemos emplear las
expresiones relativistas del momentum y de la energ´ıa cin´etica. Entonces,
seg´un la conservaci´on del momentum, obtenemos
m1v1i + m2v2i = m1v1 f + m2v2 f . (2.4)
Puesto que estamos considerando una colisi´on el´astica, la energ´ıa cin´etica
se conserva, y obtenemos, al ser Ec,i = Ec,f ,
1
2
m1v2
1i + 1
2
m2v2
2i = 1
2
m1v2
1 f + 1
2
m2v2
2 f . (2.5)](https://image.slidesharecdn.com/cuadernomodulo3mec-150428141606-conversion-gate02/85/Mecanica-50-320.jpg)

























































Este documento presenta conceptos fundamentales sobre sistemas de partículas. Explica que para analizar el movimiento de un sistema de dos partículas conectadas por un resorte, es necesario considerar el centro de masa del sistema, el cual no se mueve si no hay fuerzas externas. Luego generaliza los conceptos de centro de masa, velocidad y aceleración a sistemas de N partículas, demostrando que el movimiento del centro de masa de un sistema sigue las leyes de Newton como si toda la masa estuviera concentrada en ese
















































































