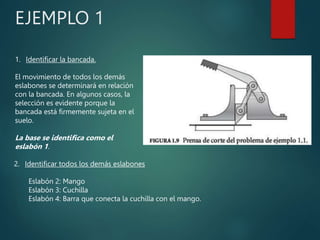
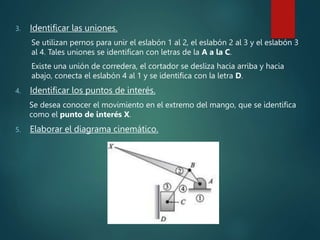
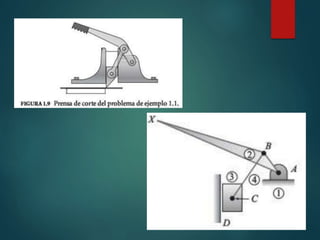
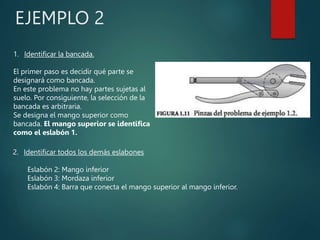
Este documento presenta información sobre cinemática y análisis cinemático de mecanismos. Explica que la cinemática estudia cómo se mueven los cuerpos y que el análisis cinemático implica determinar la posición, desplazamiento, rotación, velocidad y aceleración de un mecanismo. También presenta conceptos clave como eslabones, uniones, diagramas cinemáticos y más, con ejemplos ilustrativos.