Descargado 239 veces


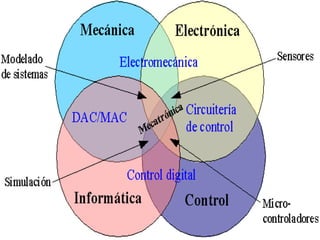




La mecatrónica surge de la integración de la mecánica, electrónica, informática y sistemas de control para crear sistemas mecánicos inteligentes. Un sistema mecatrónico típico incluye sensores para recopilar datos, controladores para procesar la información y actuadores para generar movimientos o acciones en respuesta. Algunas aplicaciones importantes de la mecatrónica son la robótica, sistemas de transporte y manufactura.




















































































