Descargado 385 veces

![CAPULLO 9
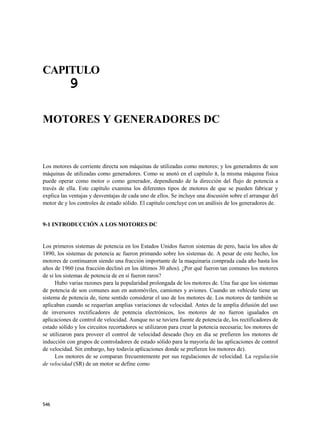
Figura 9-3
Curva de magnetización de un material ferromagnético (<p contra ?#). E a [ = K<¡ KO ]
Figura 9-4
Curva de magnetización de una máquina dc expresada como una gráfica de E contra I a una velocidad w,, ciada.
Es importante anotar que para obtener la máxima potencia posible de salida por libra de peso de
la máquina, la mayoría de los motores y los generadores están diseñados para operar cerca del punto
de saturación de la curva de magnetización (en el codo de la curva), lo cual implica que se requiere
un gran aumento de corriente de campo para obtener un pequeño aumento en £ , cuando opera
cercano a la plena carga.
Las curvas de magnetización de la máquina dc utilizadas en este libro están disponibles en
forma electrónica para simplificar la solución de ejercicios por MATLAB. Cada curva de
magnetización se almacena en un archivo MAT separado. Cada archivo MAT comprende tres
variables: las i f -valúes, que contienen los valores de la corriente de campo; las ea-valúes, que
contienen los valores correspondientes de y la n-0, que contiene la velocidad a que se midió la curva
de magnetización en revoluciones por minuto.
550](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-5-320.jpg)

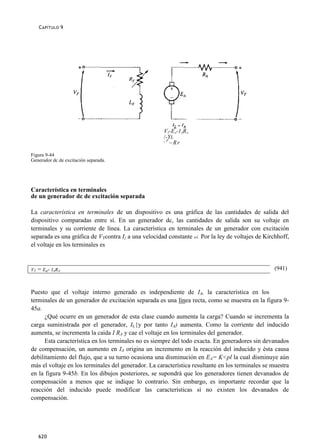
![La ecuación correspondiente a la ley de voltajes de Kirchhoff (KVL) para el circuito del
CAPULLO 9
inducido de estos motores es
VJ = EA + ¡ARA (9-
3)
Característica de los terminales de un motor dc en derivación
Una característica de los terminales de una máquina es una gráfica de las cantidades de salida de la
máquina contra cada una de las demás. En un motor, las cantidades de salida son el par al eje y la
velocidad; por tanto, su característica de los terminales es una gráfica del par contra la velocidad en
su salida.
¿Cómo responde un motor dc en derivación a una carga? Suponga que aumenta la carga en el
eje de este motor; entonces el par de carga excederá el par inducido T jnd en la máquina, y el motor
comenzará a reducir la velocidad. Cuando el motor se frena, su voltaje interno generado disminuye
(EÁ ~K(p(o j ) y la corriente del inducido del motor /4 - (Vr- EA J,)/ RA aumenta. Cuando aumenta la
corriente del inducido, aumenta el par inducido (r.nd = K<f> f) y, finalmente, el par inducido igualará
al de carga a una velocidad mecánica de rotación co más baja.
La característica de salida de un motor dc en derivación se puede deducir de las ecuaciones del
voltaje inducido y del par del motor, junto con la ecuación correspondiente a la ley de voltajes de
Kirchhoff. Esta última ecuación, aplicada al motor en derivación es
VT = EA + ¡ARA (9-3)
El voltaje inducido EA - K(f> o) tal que
VT = K(fxo + ÍARA (9-4)
Puesto que rjn(] - K<j)lA, la comente IA puede ser expresada como
í* = M (9 5)
'
Combinando las ecuaciones (9-4) y (9-5) se obtiene
VT = + (9-6)
Finalmente, despejando la velocidad del motor se obtiene
(9-
vT RÁ 7)
W
K(j> (K<t>)2
‘'nd
Esta ecuación representa justamente una linea recta con pendiente negativa. La característica
resultante par-velocidad de un motor dc en derivación se muestra en la figura 9-6a.
552](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-7-320.jpg)








![MOTORES Y GENERADORES DC
% Calcule la velocidad resultante de ecuación (9-13) n = ( e_a ./ e_a0
) * n_0;
% Calcule el par inducido correspondiente a cada % velocidad de
ecuaciones (8-55) y (8-56} t_ind = e_a . * i_a ./ (n * 2 * pi / 60);
% Dibuje la curva par-velocidad
Plot (t_ind/n, 'Color1, 'k1, 1LineWidth', 2.0);
Hold on;
Xlabel (1 tau_¿1{ind} ( N - m ) 1 , 1Fontweight', bold);
Ylabel (ítn_{m) rmbf(rmin} ' , 'Fontweight''Bold');
(/ b característica par-velocidad del motor, DC en derivación axis ( [
0 600 1100 1300]); grid on; hold off;
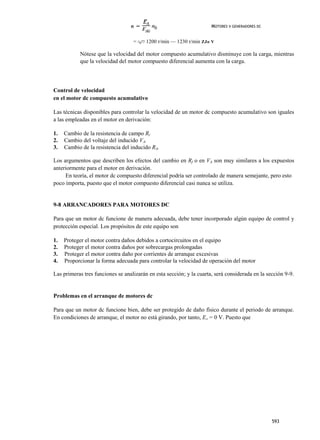
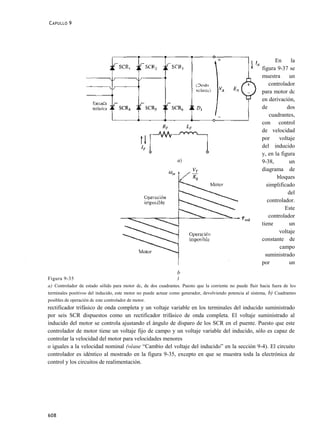
La característica resultante par-velocidad se muestra en la figura 9-10. Nótese que para cualquier carga dada, la
velocidad del motor con reacción del inducido es mayor que la del motor sin reacción del inducido.
561](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-16-320.jpg)

![MOTORES Y GENERADORES DC
E a2 = 0.99 E A] = 0.99(245 V) = 242.55V La
corriente del inducido debe aumentar a
En consecuencia, una disminución de 1% en el flujo produce un aumento de 49% en la corriente del
inducido.
De modo que para regresar al análisis original, ei aumento en la comente predomina sobre la
disminución del flujo, y el par inducido se eleva:
i íf
^"ind ” K
Puesto que r. , > T , la velocidad del motor se incrementa.
^ mu carga
Sin embargo, cuando la velocidad aumenta, el voltaje interno generado EA aumenta y oca- siona la
caída de IA. Como IA cae, el par inducido T,nJ cae también y por último, iguala de nuevo a r a una mayor
velocidad de estado estacionario que antes. 1
corgj *
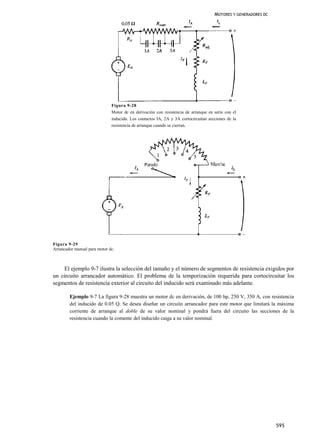
RA = 0.25 n
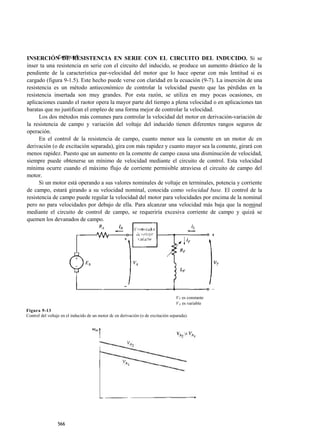
Figura 9-11
Un motor dc de 250 V en derivación, con valores típicos de y R .
Para resumir el comportamiento causa-efecto involucrado en este método de control de velocidad:
1. El aumento de Rf causa una disminución de If(~Vrl RF f ).
2. Ante la disminución de lF, disminuye 4>.
3. La disminución de <p baja EA (= K<f> i (o).
4. La disminución de Eí aumenta /, (=V' - E, l)/ R .
A A x T A * y A.
5. El aumento de /4 incrementa Tjmi (= K<f> ], IA ), (con el cambio en IA predominante sobre el cambio
en el flujo).
6. El aumento de T. ¡hace a T . > T , y la velocidad a> aumenta.
] nü ind eargu J
7. El aumento de co aumenta otra vez E^ = K<f>co t.
8. El aumento de EA disminuye lA.
9. La disminución de IA reduce T¡nd hasta que Tind - 7“ a una velocidad mayor co.
El efecto de aumentar la resistencia de campo sobre la característica de salida de un motor en derivación
563](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-18-320.jpg)

![MOTORES Y GENERADORES DC
b)
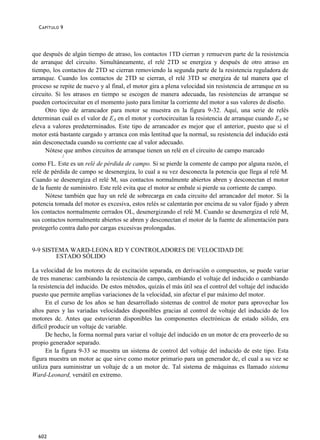
Figura 9-12
Efecto dc) control de velocidad por resistencia de campo sobre
la característica par-velocidad de un molor dc en derivación: a)
en el rango de operación normal del motor; b) en el rango
completo desde la condición de vacío hasta la condición de
rotor frenado.
Algunos pequeños motores dc, utilizados para propósitos de control, operan a velocidades cercanas a
la condición de rotor frenado. En estos motores, un aumento en la resistencia de campo podría no tener
algún efecto o disminuir la velocidad del motor. Puesto que los resultados no son predecibles, el control
de velocidad por resistencia de campo no debería utilizarse en este tipo de motores. En su lugar, debe
usarse el método de control de velocidad por voltaje del inducido.
CAMBIO DEL VOLTAJE EN EL INDUCIDO. La segunda forma de controlar la velocidad implica el
cambio del voltaje aplicado al inducido del motor sin cambiar el voltaje aplicado al campo.
Para realizar este tipo de control, se requiere una conexión similar a ia de la figura 9-13. En efecto, el
motor debe ser excitado por separado para utilizar el control de voltaje del inducido.
Si el voltaje V4 aumenta, se debe aumentar la corriente del inducido en el motor [IA - (V t - E) /
RÁ]- Como IA aumenta, el par inducido T_d = K<p t aumenta de modo que t > T y la velocidad co del
raotor aumenta.
Como la velocidad &> aumenta, el voltaje interno generado E ( - K4>OJ f) aumenta causando
una disminución en la corriente del inducido. Esta disminución en IA reduce el par inducido y
ocasiona que éste T.nJ iguale al par de carga r a una mayor velocidad a> de rotación.
Para resumir el comportamiento causa-efecto en este método de control de velocidad:
1. Un aumento en VA eleva IA [= (VA f - Ex) / RA].
2. El aumento de IA incrementa Tind (- K^> IA T).
3. El aumento de r „hace que T. , > T , y aumenta ea.
ind md carea J
4. El aumento de to incrementa a EA {=K<j>co f )-
5. El aumento de EAhace que disminuya IA [= (VA t - E ) l /? ].
6. La disminución de IA reduce a rjnd hasta que Tmd = t a una mayor velocidad <o.
En la figura 9-14 se muestra el efecto de un aumento en V sobre la característica par-velocidad de un
motor con excitación separada. Nótese que en este método de control varía la velocidad de vacío del
motor, pero la pendiente de la curva permanece constante.
565](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-20-320.jpg)



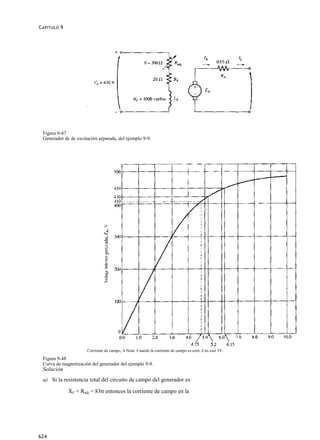
![CAPÍTULO 9
R a = 0.03 Q 1
A ¡L
hk
Figura 9-17
a) Motor dc en derivación del ejemplo 9-3. b) Motor dc de excitación separada de] ejemplo 9-4
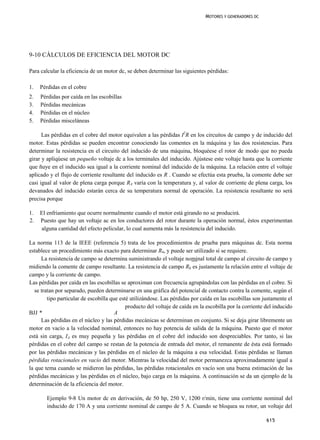
Después que la resistencia de campo aumenta a 50 Q, la corriente de campo es
, _ _ 250 V F1 RF
50 O
La relación entre el voltaje interno generado a una velocidad y el voltaje interno generado a otra
velocidad está dada por la relación de la ecuación (8-41) en las dos velocidades:
E¿2 _ K <f)2n2
Ea i K'^n,
Puesto que la corriente del inducido se supone constante. E = Ey y esta ecuación se reduce a
2 _ h!h
A «fe”1 (9-17)
570](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-25-320.jpg)
![CAPULLO 9
% Calcule la corriente de campo para cada valor de la %
resistencia de campo i_f = v_t ./ r_f;
% Calcule E_aO para cada corriente de campo interpolando
% la curva de magnetización del motor
e_aO = interpl(if_values, ea_values, i_f,'spline';
% Calcule la velocidad resultante de la ecuación (9-17)
% n2 = {phil / phi2) * ni = (e_aO_l / e_a0_2 ) * ni n2 = (
e_aO_ref ./ e_aO) * n_ref;
% Dibuje la curva velocidad contra r_f Plot(r_f,n2, 'Color',
k1 , 1 LineWidth1, 2.0);
Hold on;
Xlabel (1 Resistencia de campo, Omega1, 'Fontweight', 1Bold1);
r
Ylabel ('itn_{m}rmbf(r/min) , ' Fontweight1,'Bold1);
Title ('velocidad vs ítR_{F) rmbf para un motor DC en
derivación',... 'Fontweight','Bold!); axis ([40 70 0 1400];
grid on; hold off;
La gráfica resultante se muestra en la figura 9-18. •
Nótese que, para cargas reales, suponer constante la corriente deí inducido cuando cambia Rf no es muy
correcto. La corriente del inducido variará con la velocidad dependiendo del par requerido por el tipo de carga
unida al motor. Debido a estas diferencias, ía curva de velocidad contra Rf será un poco diferente de la que se
muestra en la figura 9-18, pero tendrá la misma forma.
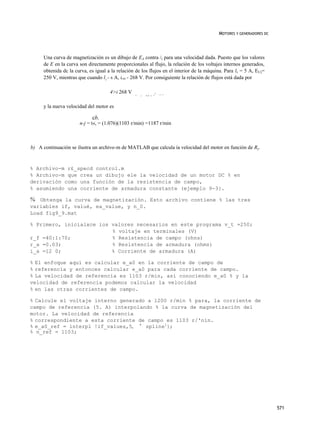
Ejemplo 9-4 El motor del ejemplo 9-3 está conectado ahora con excitación separada, como se muestra en
la figura 9-17Z>. Al princio el motor gira con V = 250 V, / = 120 Ay n = 1103 r/min mientras suministra
una carga de par constante. ¿Cuál será la velocidad de este motor si VA se reduce a 200 V?
Solución El motor tiene una comente inicial de línea de 120 A y un voltaje del inducido VA de 250 V, de
modo que el voltaje interno generado E es
E
A = VT - }ARA = 250 v - (120 A)(0.03 O) = 246.4 V
Aplicando la ecuación (9-16) y teniendo en cuenta que el flujo (p es constante, la velocidad dei motor se
puede expresar como
E
A2 K'4>2n2
(>t6)
EM K'4>,n,
n7
E
A2
n
2 = y~n
&AI
Para encontrar EA2 se utiliza la ley de voltajes de Kirchhoff:
E
A2 = VT ~ ¡AZ^A
Puesto que el par y el flujo son constantes, / Aes constante. Esto produce un voltaje de EA2 = 200
572](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-27-320.jpg)











![MOTORES V GENERADORES DC
% Primero, inicialice los valores necesarios en este programa
v_t =250; % Voltaje en terminales (v)
r_a =0.08; % Armadura + resistencia de campo (ohms;
i_a =10:10:300; % Corriente de armadura (línea) (A)
n_s = 2 5 ; % Número de espiras serie en el campo
% Calcule la FMM para cada carga f = n_s * i_a;
% Calcule el voltaje interno generado e_a. e_a = v_t - i_a * r_a;
% Calcule el voltaje interno generado a
% 1200 r/min interpolando la curva de magnetización del motor.
e_aO = interpl (mmf_values,ea_values, f,1spline');
% Calcule la velocidad del motor de ecuación (9-13). n = (e_a ./
e_a0) * n__0 ;
% Calcule el par inducido correspondiente a cada velocidad de
% ecuaciones (8-55) y (8-56).
t_ind = e_a .* i_a ./ (n * 2 * pi / 60);
Dibuje la curva par-velocidad
plot (t_ind, n, 'Color1, 'k‘, 'LineWidth1 ,2 . 0) ;
hold on;
Xlabel ('tau_{ind} (N-m)1, 1Fontweight1, 'Bold');
Ylabel (1tn_{m} rmbf{r/min)1,1Fotweight1,1Bold');
title ('característica par-velocidad del motor DC serie', ...
1
Fontweight',1Bold!);
axis ([ 0 700 0 5000]);
grid on; hold off;
La característica par-velocidad resultante del motor se muestra en la figura 9-23. Nótese el severo
exceso de velocidad en pares muy pequeños.
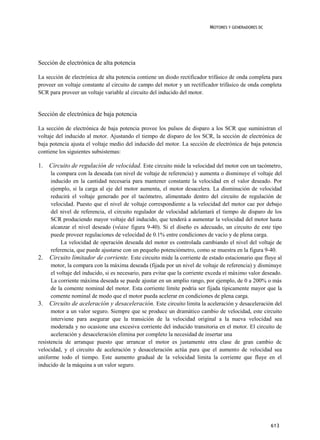
Control de velocidad de motores dc serie
A diferencia del motor dc en derivación, hay sólo una forma eficiente de variar la velocidad de un
motor dc serie: cambiar el voltaje en los terminales del motor. Si se aumenta el voltaje en los
terminales del motor, el primer término de la ecuación (9-23) aumenta y resulta una mayor velocidad
para cualquier par dado.
585](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-40-320.jpg)






![CAPÍTULO 9
a) ¿Cuántos tramos de resistencia de arranque se requerirán para limitar la corriente al rango
especificado?
b) ¿Cuál debe ser el valor de cada segmento de resistencia? ¿ A qué voltaj e debería ser cortocircuitado
cada tramo de la resistencia de arranque?
Solución
a) La resistencia de arranque debe seleccionarse de modo que el flujo de corriente iguale al doble de ía
corriente nominal del motor cuando éste se conecta en principio a la línea. Cuando el motor
comienza a acelerar, se producirá un voltaje interno generado EA. Puesto que este voltaje se opone
al voltaje en los terminales del motor, el aumento del voltaje interno generado disminuye el flujo de
corriente en el motor. Cuando la corriente que fluye en el motor cae a su valor nominal, se debe
retirar del circuito una sección de la resistencia de arranque para aumentar la comente de arranque
hasta 200% de la corriente nominal. Como el motor continúa acelerando, el voltaje E continúa
aumentando y la corriente del inducido, disminuyendo. Cuando la corriente que fluye en el motor
cae de nuevo a su valor nominal, se debe desconectar otra sección de la resistencia de arranque.
Este proceso se repite hasta que la resistencia de arranque que debe ser removida en una etapa dada
es menor que la resistencia del circuito del inducido del motor. En este punto, la resistencia del
inducido del motor limitará la comente a un valor seguro.
¿Cuántos pasos se requieren para llevar a cabo la limitación de corriente? Para obtener la respuesta,
se define ¿?Mcomo ]a resistencia original en el circuito de arranque. Por tanto, Rti i es la suma de la
resistencia de cada etapa de la resistencia de arranque junto con la resistencia del circuito del
inducido del motor:
= *1 + *2 + ■ ■ ■ + *4 (9-29)
Ahora se define R como la resistencia total que permanece en el circuito de arranque luego de que
se han cortocircuitado las etapas 1 a i. La resistencia que queda en el circuito luego de remover las
etapas 1 a i es
+ ■ ■ ■ + RA (9-30)
Nótese también que la resistencia inicial de arranque debe ser
VT
tftot T .
1 inax.
En la primera etapa del circuito de arranque, la resistencia R¡ debe ser desconectada del circuito
cuando la corriente Is cae a
Después de desconectado ese tramos de resistencia, la corriente del inducido debe saltar a
= VtZEí =
l
A jp 'ma*-
tot, 1
596](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-51-320.jpg)
![C APÍTULO 9
Puesto que EA (- Kfyco) es directamente proporcional a la velocidad del motor, la cual no puede cambiar
instantáneamente, la cantidad VT- E l debe ser constante en el instante en que se desconecta la
resistencia. Entonces
AmnAtot - V] -- — Irn¡aR]
o la resistencia que queda en el circuito después de desconectar el primer tramo es
(9-31)
Por extensión directa, la resistencia que queda en el circuito después de que el enésimo tramo ha sido
desconectado es
(9-32)
El proceso de arranque se completa cuando R , para el tramo n, es menor o igual a la resistencia interna
del inducido RA del motor. En ese punto, i? puede limitar la comente al valor deseado. En el límite
donde R.-R, .
A 10U!
(9-33)
(9-34)
Resolviendo para n se obtiene
log (RA/Rtot)
(9-35)
donde n debe ser redondeada al próximo valor entero puesto que no es posible tener un
número fraccionario de tramos en el arranque. SÍ n tiene una parte fraccionaria, cuando se desconecta la
etapa final de la resistencia de arranque, la corriente del inducido del motor saltará aun valor más
pequeño que / .
En este problema particular, la relación 1 ¡I = 0.5 y, R es
r 7 J
-r rmn. max. tot
por tanto
log (/ro¡D.//mix.) log (350 A/700 A)
El número de tramos requeridos será tres.
597](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-52-320.jpg)





![MOTORES Y GENERADORES DC
b)
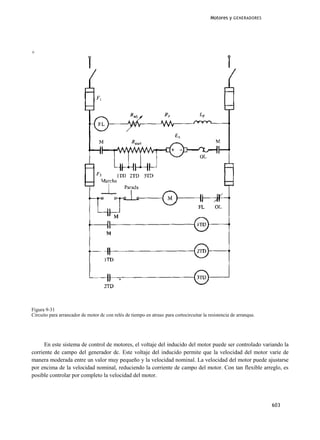
Figura 9-32 (continuación)
b) Comente del inducido en un motor dc durante c] arranque.
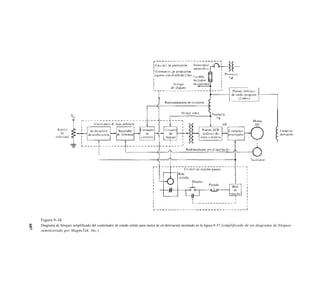
Otra ventaja del sistema Ward-Leonard radica en que puede “regenerar” o devolver la energía del
movimiento de la máquina a las líneas de suministro. Si se utiliza el motor dc de un sistema Ward-Leonard
para levantar primero una carga pesada y bajarla luego, el motor actúa como generador cuando la carga está
bajando, y suministra potencia de vuelta al sistema de potencia. En esta forma puede recuperarse mucha de
la energía requerida para elevar la carga en primer lugar, y reducir los costos totales de operación de la
máquina.
Los posibles modos de operación de la máquina dc se muestran en el diagrama par-velocidad de la
figura 9-34. Cuando este motor está rotando en su dirección normal y suministrando un par en la dirección
de rotación, opera en el primer cuadrante de la figura. Si se invierte la corriente de campo del generador, se
invertirá el voltaje en los terminales del generador, lo que a su vez invierte el voltaje del inducido del motor.
Cuando el voltaje del inducido se invierte y la comente de campo del motor permanece inmodificable, tanto
el par como la velocidad del motor se invierten y la máquina opera como motor en el tercer cuadrante del
diagrama. Si se invierte sólo el par o la velocidad del motor, mientras la otra cantidad permanece sin
modificar, la máquina sirve como generador devolviendo potencia al sistema de potencia dc. Debido a que el
sistema Ward-Leonard permite rotación y regeneración en cada dirección, se llama sistema de control de
cuatro cuadrantes.
Las desventajas del sistema Ward-Leonard son obvias. Una es que el usuario está forzado a comprar
tres máquinas completas de capacidad esencialmente igual, lo cual es muy costoso. Otra desventaja es que
tres máquinas serán mucho menos eficientes que una sola. Debido a su costo y baja eficiencia relativa, el
sistema Ward-Leonard ha sido remplazado en las nuevas aplicaciones por los circuitos controladores basados
en SCR.
605](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-60-320.jpg)



























![C APÍTULO 9
Puesto que ambos efectos tienden a disminuir Vr el voltaje cae drásticamente cuando se aumenta la
carga en el generador. En la figura 9-66 se muestra una característica de los terminales típica para un
generador dc compuesto diferencial.
Control de voltaje de generadores dc
compuestos diferenciales
Aunque las características de caída de voltaje en un generador dc compuesto diferencial son bastante
malas, es posible ajustar el voltaje en los terminales para una carga dada. Las técnicas disponibles para
ajustar el voltaje en los terminales son las mismas empleadas en los generadores dc en derivación y
compuestos acumulativos:
1. Cambio de la velocidad de rotación co . 771
2. Cambio de la comente de campo Jr
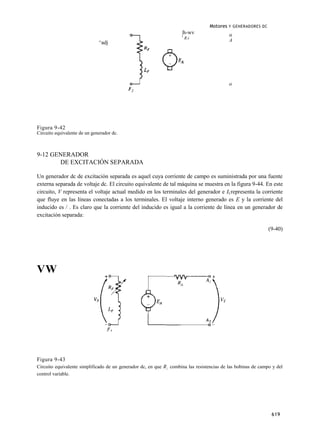
Análisis gráfico de un generador dc
compuesto diferencial
El voltaje característico de un generador dc compuesto diferencial es determinado gráficamente de la
misma forma utilizada para el generador dc compuesto acumulativo. Para encontrar la característica de los
terminales de la máquina, remítase a la figura 9-67.
La porción de la corriente efectiva del campo en derivación, debida al campo en derivación real, es
siempre igual a V1/RF puesto que hay mucha corriente en el campo en derivación. La corriente efectiva de
campo remanente está dada por / , y es la suma de los efectos del campo serie y de la reacción del
inducido. Esta comente equivalente /^representa una distancia negativa horizontal a lo largo del eje de la
curva de magnetización puesto que ambos, el campo serie y la reacción de] inducido, son sustractivos.
Figura 9-66
Característica de los terminales de un generador dc compuesto
diferencial.
642](https://image.slidesharecdn.com/motoresygeneradoresdc-120804213140-phpapp01/85/Motores-y-generadores-dc-97-320.jpg)



Este documento describe los diferentes tipos de motores de corriente continua (DC), incluidos los motores DC con excitación separada, los motores DC en derivación, los motores DC de imán permanente, los motores DC serie y los motores DC compuestos. Explica el circuito equivalente de un motor DC y analiza la curva de magnetización de una máquina DC. Finalmente, compara los motores DC con excitación separada y los motores DC en derivación.














































































