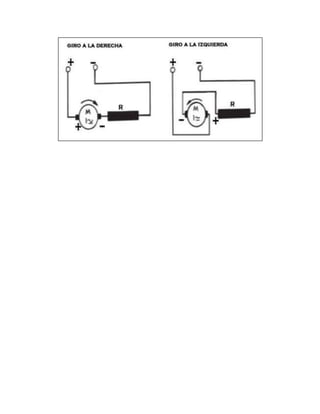
Este documento describe diferentes métodos de arranque de motores de corriente directa, incluyendo métodos manuales y automáticos. Explica cómo los arrancadores manuales funcionan mediante la incorporación y eliminación gradual de resistencias en el circuito del motor. También describe varios tipos de arrancadores automáticos que usan contactores magnéticos para cortocircuitar resistencias de forma automática. Por último, explica cómo invertir el giro de un motor de corriente directa cambiando la polaridad en sus bornes.