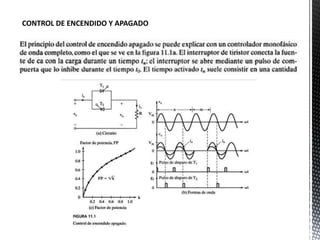
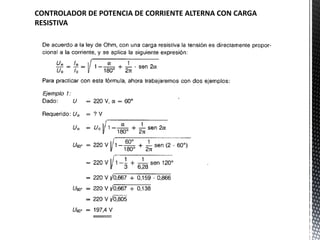
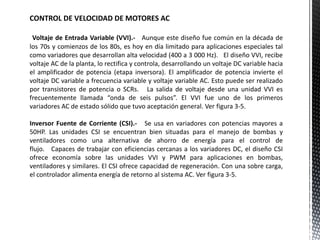
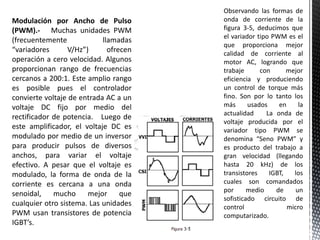
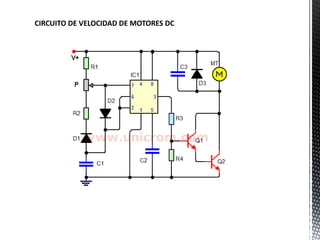
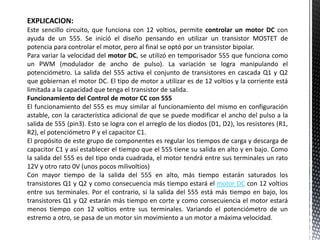
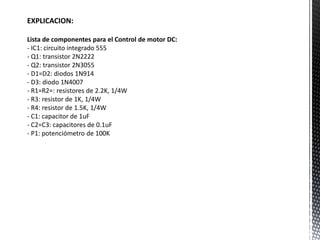
Este documento describe diferentes tipos de controladores de potencia, incluyendo controladores de encendido y apagado, controladores de corriente alterna con carga resistiva, control de velocidad de motores de corriente alterna mediante variadores de voltaje, inversores de fuente de corriente y modulación por ancho de pulso, y un circuito de control de velocidad para motores de corriente continua utilizando un temporizador 555.






























![Pb0533t[1]](https://cdn.slidesharecdn.com/ss_thumbnails/pb0533t1-131006155037-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


























