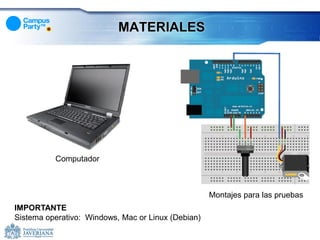
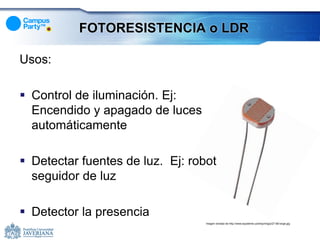
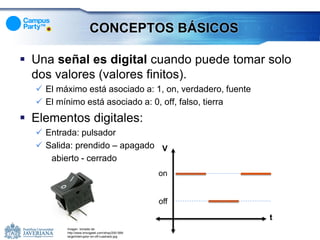
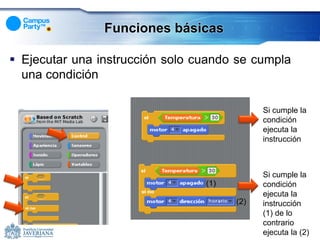
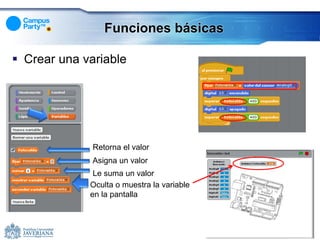
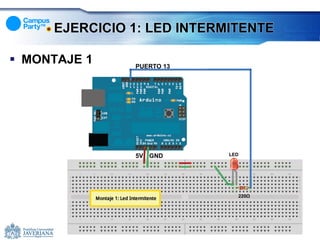
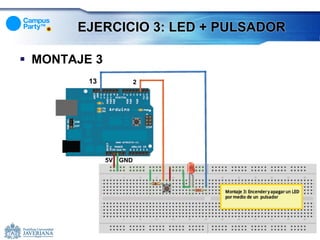
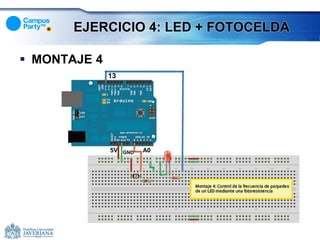
Este documento presenta un taller sobre la implementación de robots utilizando la plataforma Arduino. El taller enseña a los participantes a controlar elementos de un robot como LEDs, potenciómetros, fotoceldas y servomotores utilizando programación gráfica en entornos como Arduino IDE y Scratch para Arduino sin necesidad de conocimientos previos de programación. El documento explica los conceptos y materiales básicos necesarios como la tarjeta Arduino UNO, cables, sensores y actuadores, así como ejemplos prácticos de proyectos como enc