Descargado 256 veces







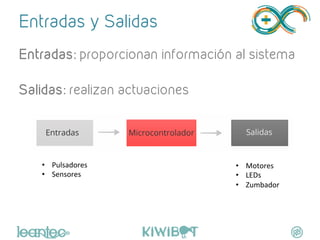
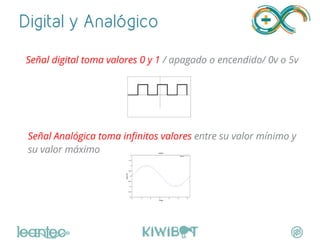

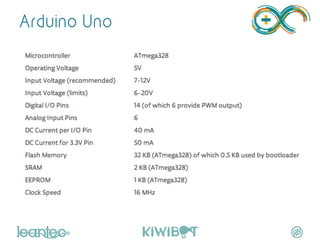
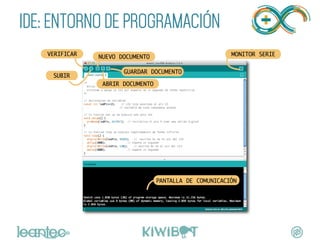
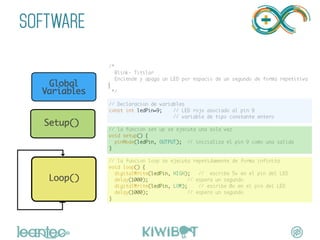

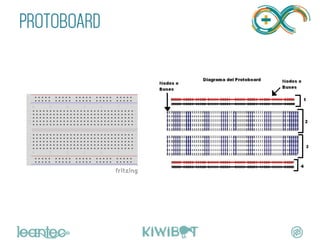







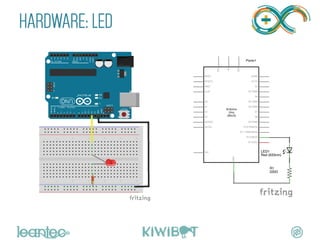
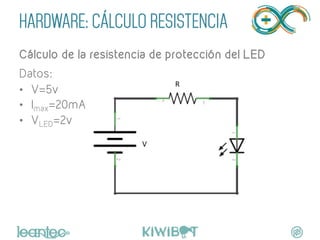
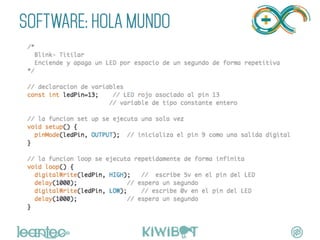
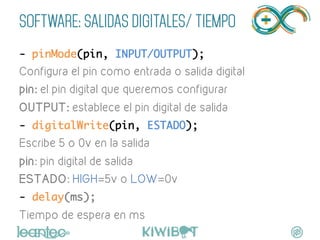


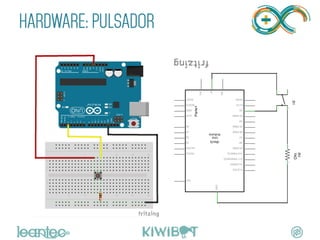
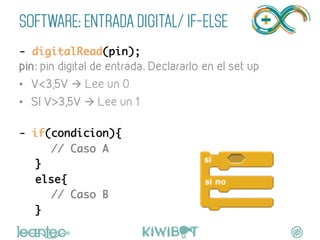
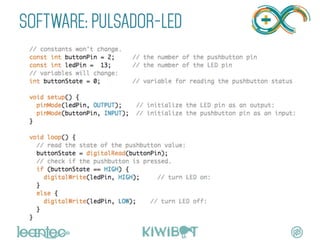

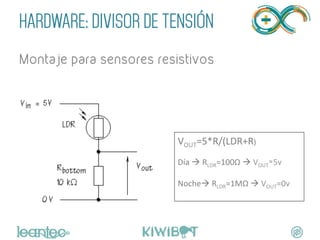
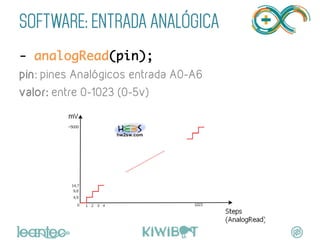

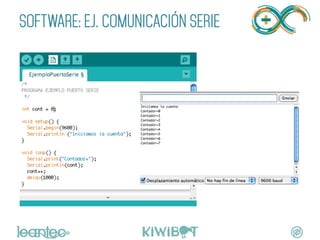
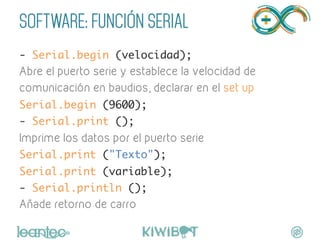
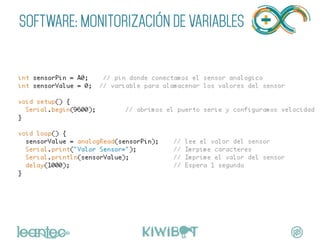


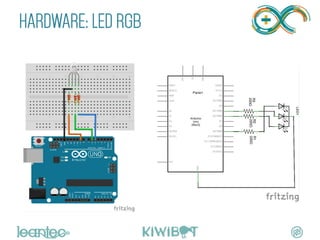

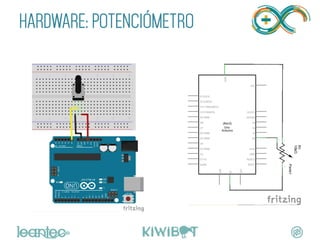






Este documento presenta una introducción al uso de Arduino para la construcción de robots. Explica conceptos básicos como entradas y salidas digitales y analógicas, e incluye prácticas para trabajar con LEDs, pulsadores, sensores de luz y motores. El taller enseña a controlar dispositivos mediante la programación de Arduino con el objetivo de crear prototipos robóticos.


























































![Control de un Motor [Autoaaaaaaaaaaaaaaaaaguardado].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/controldeunmotorautoguardado-241113235820-1bbdae93-thumbnail.jpg?width=640&height=640&fit=bounds)











































