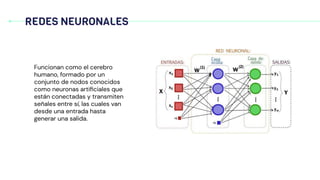
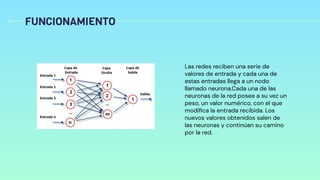
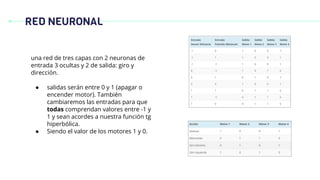
Las redes neuronales funcionan como el cerebro humano, formadas por nodos conocidos como neuronas artificiales conectadas que transmiten señales de entrada a salida. El aprendizaje automático usa algoritmos para aprender de datos sin intervención humana, clasificándose en supervisado, no supervisado y refuerzo. Un ejemplo es un seguidor de línea con una red neuronal de tres capas que controla motores de un auto miniatura basado en Arduino.








![ARDUINO
Arduino elegoo uno v3 de 4 motores.
● Una placa Arduino Uno y una placa de
expansión de IO
● El controlador de motor L298N
● 4 motores DC y sus ruedas
● Servo Motor SG90 Y Sensor
Ultrasónico]
● Baterías para alimentar los motores (y
la placa obviamente!)
● Chasis para el coche Y Cables](https://image.slidesharecdn.com/montorojoaquin4toa-redesneuronales-201117233139/85/Redes-Neuronales-Robotica-23-320.jpg)