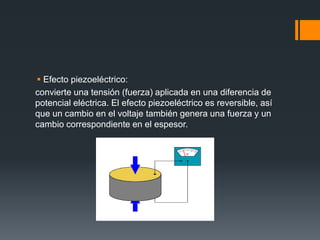
Los sensores mecánicos convierten fuerzas físicas como presión, tensión y temperatura en señales eléctricas mediante efectos piezoresistivos o piezoeléctricos. Se utilizan comúnmente para medir esfuerzos, deformaciones y cantidades indirectas como fuerza, presión y temperatura. Presentan ventajas como detección directa y precisión, pero también desventajas como desgaste, oxidación y tamaño relativamente grande.