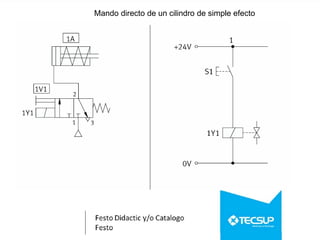
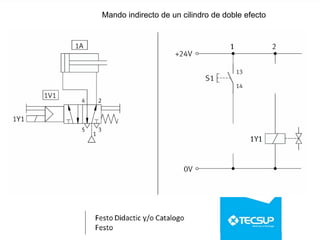
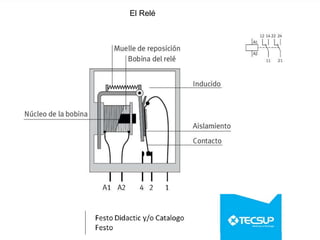
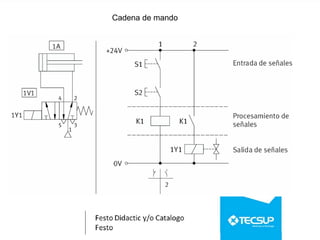
Este documento trata sobre electroneumática y describe sus componentes principales como bobinas, electroválvulas neumáticas y aparatos eléctricos. Explica cómo los circuitos eléctricos pueden controlar sistemas neumáticos y da ejemplos de funciones lógicas y temporizadores. El objetivo es identificar los componentes de una instalación electroneumática y cómo controlan los circuitos neumáticos.

![Bibliografía
• 1 Festo Didactic (1976). Iniciación al
personal de montaje y mantenimiento.
Berkhein. Festo. (621.5/F/I-P)
• 2 Festo Didactic (1980). Introducción a
la
neumática. Esslingen: Festo.
(621.5/F/I)
• 3. Neumática [2008]. Antonio Serrano
Nicolás](https://image.slidesharecdn.com/electroneumatica-aplicada1-240205050034-eb6b9c26/85/Electroneumatica_1_Sistemas-Neumaticos-pptx-59-320.jpg)