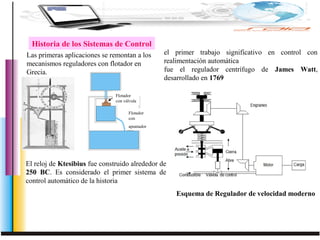
Los sistemas de control se remontan a mecanismos reguladores griegos con flotadores en el siglo III a.C. El reloj de Ktesibius fue el primer sistema de control automático. En el siglo XVIII, el regulador centrífugo de James Watt fue el primer trabajo significativo en control con realimentación automática. Durante la segunda guerra mundial, hubo grandes avances en servomecanismos, autopilotos y control de armas.