Descargar para leer sin conexión

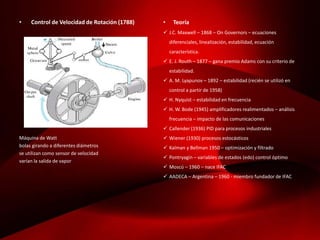


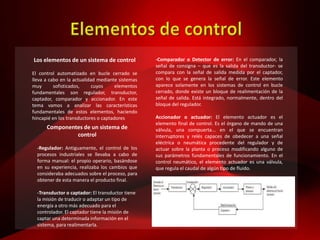
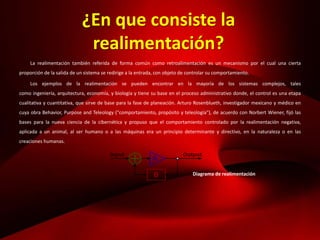

El documento resume la historia de los sistemas de control, desde los primeros ejemplos de control de nivel y temperatura hasta el desarrollo de la teoría con Maxwell, Routh, Lyapunov y otros. También describe los elementos clave de un sistema de control de retroalimentación, incluyendo regulador, transductor, comparador y actuador, así como los tipos de sistemas de control de lazo abierto y cerrado.


























































