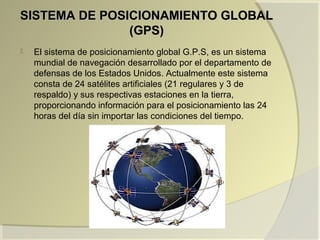
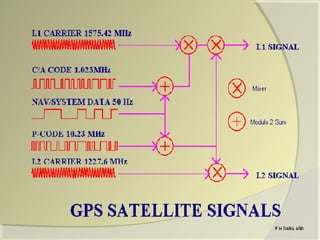
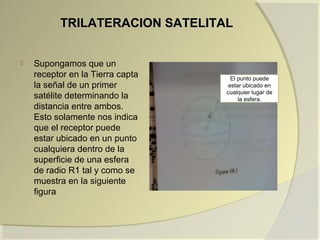
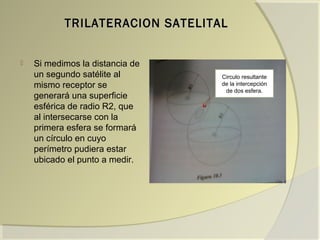
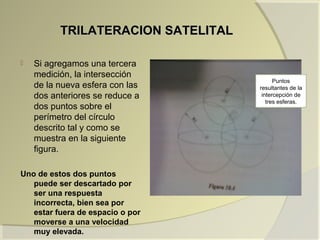
Este documento describe el Sistema de Posicionamiento Global (GPS). El GPS consta de 24 satélites que orbitan la Tierra y estaciones en tierra que controlan la posición precisa de los satélites. Los receptores GPS pueden determinar su posición a través de la trilateración, midiendo las distancias a múltiples satélites usando el tiempo que tarda la señal en viajar. El GPS proporciona posicionamiento a nivel mundial con precisión de unos pocos metros.