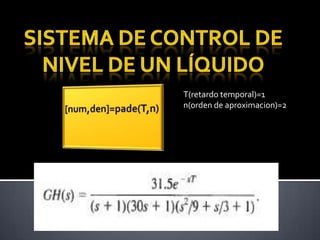
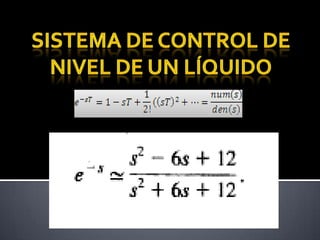
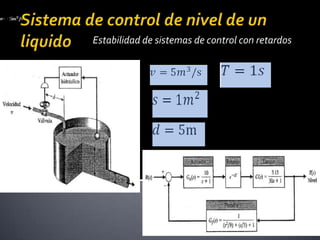
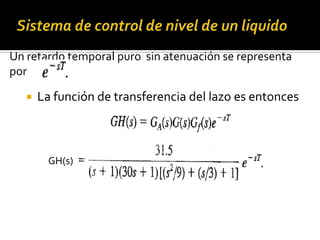
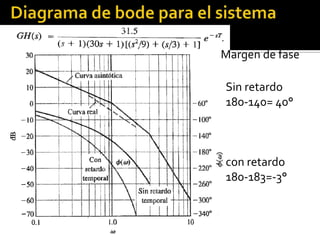
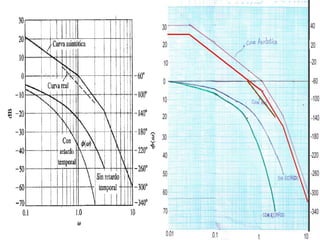
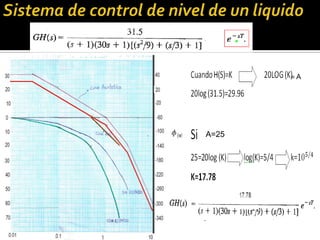
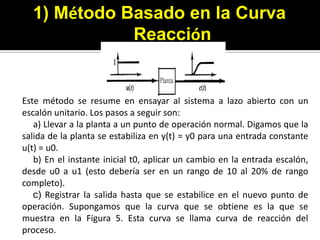
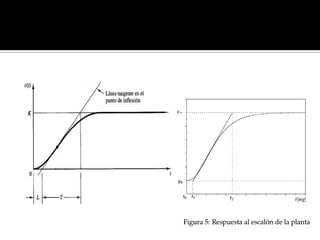
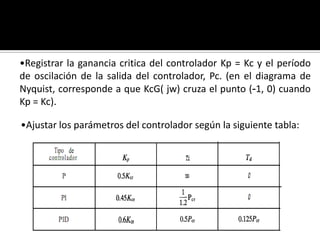
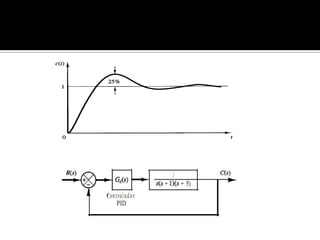
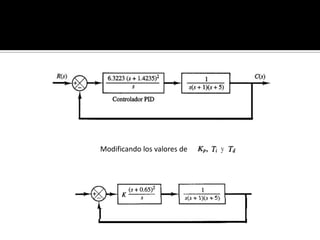
Este documento trata sobre la estabilidad de sistemas de control con retardos. Explica que los retardos son comunes en sistemas que tienen tiempos de procesamiento o transporte considerables y provee ejemplos como plantas de destilación o procesos de secado. Describe cómo los retardos se representan mediante funciones de transferencia y cómo afectan la estabilidad del sistema, reduciendo el margen de fase. Finalmente, explica métodos para analizar y ajustar la estabilidad de sistemas con retardos como el criterio de Nyquist y controladores PID.
![nyquist=(num,dem,w)[re,im]=nyquist(num,dem,w)COMANDOS MATLAB](https://image.slidesharecdn.com/controlautomatico-100622234432-phpapp02/85/Control-automatico-27-320.jpg)
![Margin(num,dem)[mg,mf,wmg,wmf]=margin (num,dem)COMANDOS MATLAB](https://image.slidesharecdn.com/controlautomatico-100622234432-phpapp02/85/Control-automatico-28-320.jpg)