
Recomendados
Más contenido relacionado
Similar a VALORACIÓN DE LA MARCHA HUMANA Y SUS DEFICITS
Similar a VALORACIÓN DE LA MARCHA HUMANA Y SUS DEFICITS (20)
Último
Último (20)
VALORACIÓN DE LA MARCHA HUMANA Y SUS DEFICITS
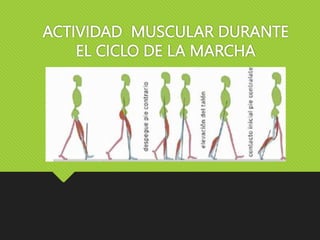
- 1. ACTIVIDAD MUSCULAR DURANTE EL CICLO DE LA MARCHA
- 2. Los músculos cumplen tres funciones importantes durante la marcha Frenado de los segmentos arrastrados por la energía cinética. Amortiguación de impactos y vibraciones. Aceleración de los segmentos, en escasa medida. Triple papel de los músculos del miembro inferior.
- 3. Una parte importante de la acción de los músculos tiene por objetivo el frenado en estabilización. Para ello utilizan su capacidad viscoelástica que permite el movimiento a la vez que lo retrasa, por modulación de la pre regulación de la tensión activa.
- 4. El músculo como estructura disipante Es en el momento de contacto de talón, los músculos del miembro inferior absorben una parte del impacto y participan en la disipación de carga. Limita la caída lateral de la cadera.
- 5. El músculo como órgano de frenado por viscoelasticidad Algunos músculos utilizan su viscoelasticidad para retrasar una acción, frenándola sin bloquearla. Pero al final de la fase de oscilación, los isquiotibiales frenan la extensión de la rodilla justo antes del final de recorrido. Aun mas solicitado, el tríceps sural, tomando apoyo en el pie anclado en el suelo, que retrasa el avance del pilón tibial y asegura la estabilidad de la rodilla.
- 6. El músculo como órgano de aceleración de los segmentos El miembro inferior oscilante debe recibir un impulso hacia adelante, en el cual actúa los músculos aductores del muslo, que participa de manera importante en la flexión de cadera. A partir de este impulso inicial, en el miembro inferior actúa como un doble péndulo al menos en terrenos llanos.
- 7. El músculo como órgano del equilibrio El individuo en apoyo monopodal se comporta como un péndulo invertido sujeto por el pie móvil alrededor del tobillo.
- 8. Esfuerzo muscular controlado durante las dos fases del ciclo de marcha El ciclo de marcha completa se define, según las normas internacionales, desde un contacto de talón hasta el siguiente contacto del talón del mismo pie.
- 9. La actividad muscular se analiza a partir de los segmentos mas distales, porque durante la marcha solo el pie es estable y los demás segmentos del cuerpo son móviles. El anclaje de los músculos parte del punto fijo que es el pie.
- 10. Acción de los músculos durante la fase de apoyo Durante la primera parte del ciclo, la fase de apoyo el miembro inferior se ve sometido a fuerzas de compresión porque todo el peso del cuerpo descansa sobre un solo pie. Una actividad muscular bastante pronunciada se manifiesta durante esta fase, y los músculos activos se denominan músculos de apoyo.
- 11. Acción de los músculos durante la fase de apoyo Las acciones musculares de la fase de apoyo se reparten entre: La amortiguación de impactos. El frenado viscoelástica de estabilización. La aceleración de segmentos. Protección del esqueleto ósea mediante contracciones estabilizadoras.
- 12. Acción de los músculos durante la fase de oscilación Durante la segunda parte del ciclo, la fase de oscilación que permite el movimiento hacia delante del pie que ha despegado del suelo, el miembro inferior esta libre y se comporta como doble péndulo.
- 13. Acción de los músculos durante la fase de oscilación El trabajo muscular de los músculos de la oscilación es de poca magnitud y consiste en un frenado (isquiotibiales) en un ajuste de la rigidez activa en anticipación a la necesidad de asegurar la amortiguación de un impacto.
- 14. Anticipación y prerregulación de la tensión activa del músculo Knuttsen destaco que los músculos debían estar preregulados durante la marcha, la carrera y el salto. Los músculos estabilizadores de la pelvis necesitan unos 200ms para adquirir tensión, pero con la marcha rápida solo dispone de 100ms. Este fenómeno de prerregulación de una rigidez suficiente para asegurar el equilibrio probablemente viene rígido por una memoria motriz que ha almacenado las situaciones diversas del cuerpo durante la marcha y la carrera.
- 15. Actividades musculares objetivas por electromiografía telemétrica Los músculos pueden indicar directamente la duración e intensidad de las contracciones necesarias para controlar la deambulación. Insertar tabla de pág. 31
- 18. Primer tiempo principal de la actividad muscular: contacto con el suelo y choque de talón Se trata del individuo caminando, no al inicio del paso.
- 19. Contacto de Talón Justo antes que el talón del individuo entre en contacto con el suelo, los músculos del compartimento anterior están en pretensión. Contribuyen de manera importante a amortiguar el impacto e impedir que el antepié golpee secamente el suelo.
- 20. Contacto de Talón A nivel de la rodilla, el cuádriceps también se anticipa y prepara su acción para impedir una flexión demasiado marcada. Cuanto mas aumente la velocidad de la marcha, mas importante es la flexión de la rodilla en el momento del contacto con el suelo y mayor es la demanda del cuádriceps.
- 21. Segundo tiempo principal: equilibrio monopodal Cuando el individuo esta en equilibrio monopodal, el peso de la unidad cabeza-brazo-tronco (CBT, 60 % del peso total) pasa por la vertical de este pie único, creando las solicitaciones del apoyo monopodal.
- 22. Segundo tiempo principal: equilibrio monopodal Es entonces cuando las actividades musculares son mayores. Se pueden dividir en dos tipos: Estabilidad anteroposterior Estabilidad lateral.
- 23. Estabilidad Anteroposterior La rodilla se mantienen flexionada alrededor de 15° a 20° durante todo este periodo. El cuádriceps actúa en el momento en que el miembro inferior recibe el peso del cuerpo, y después deja rápidamente de ser activo. La rodilla a continuaciones e extiende a continuación de forma gradual hasta alcanzar entre 3° a 5° de flexión en el momento en el que el talón se eleva y cuando los dedos están a punto de separarse del suelo, la rodilla se flexiona de nuevo para alcanzar una flexión de 7° a 10°.
- 24. El tríceps sural asegura la estabilidad de la rodilla utilizando el pie como inserción fija y actuando por visco elasticidad sobre el pilón tibial. El tríceps sural se encarga de asegurar la estabilidad de la rodilla tanto en situación estática como dinámica. El cuádriceps es el más potente de todos los músculos, pero es poco utilizado en la marcha actuando sobre todo como amortiguador de impacto en el momento del contacto con el talón.
- 25. Estabilidad lateral, distal y proximal del miembro inferior La estabilidad lateral distal esta asegurada por los perineos que controlan el tobillo y una sinergia con el tibial posterior que aseguras la estabilidad del pie. La estabilidad proximal es debido a los estabilizadores laterales de la pelvis (glúteo menor y medio) que son activos durante el primer periodo de la marcha. Los aductores se contraen en el momento en el momento de contacto con el talón para asegurar la estabilidad de la pelvis y se disipa en parte mediante del borde externo del pie.
- 26. Estabilidad lateral de la Pelvis Es asegurada por dos sistemas musculares: Monoarticular reclutada por glúteo medio Aponeurótico biarticular reclutada por la cintilla iliotibial, el músculo tensor de la fascia lata y fibras laterales y superficiales de l músculo glúteo mayor.
- 27. Cintilla Iliotibial Esta lamina fibrosa que se extiende entre el ala iliaca y la tibia, une la pelvis a la pierna los dos músculos que se insertan en esta regulan la tensión de la aponeurosis. La inserción vital de la cintilla iliotibial se divide en dos cabezas una de las cuales recubre el borde externo de la rotula.
- 29. El relieve muscular de la parte proximal muestra la función estabilizadora de este complejo musculoaponeurítico, que es muy solicitado en la actividad física como la marcha rápida, la carrera, el salto deportes que se practiquen con las rodillas flexionadas.
- 30. Papel episódico del cuádriceps Si el cuádriceps se utiliza de forma lenta durante la marcha en terreno llano constituye una reserva de potencia utilizada para levantar o sentarse, para subir o bajar en situaciones que se necesite extender por completo las rodillas.
- 31. Estabilidad de la rodilla con menos de 15° de flexión Para pasar de 15° de flexión de rodilla a la extensión completa de 0° el cuádriceps debe doblar su esfuerzo en relación al necesario para pasar de 90° a 15°.
- 32. Peligro del Genu Flexum Es una sobre presión entre fémur y tibia, y este desencadena una compresión importante entre la rotula y el fémur y una imponente contracción de los cuádriceps y todo esto crearía un proceso inflamatoria.
- 33. Presiones aplicadas al Pie de Carga El individuo que se desplaza a una velocidad normal contacta con el suelo aplicando una fuerza ligeramente superior al peso del cuerpo a cada paso: entre un 120% a 3,5km/h y un 150% a 5km/h. Estos valores varían con la habilidad del sujeto, el tipo de calzado, y el terreno.
- 35. Estabilidad de la rodilla con mas de 30° de flexión Entre 0° y 25° de flexión se puede estabilizar la rodilla con una contracción débil, pero apartar de 30° de flexión el requerimiento del músculo se intensifica. si El cuádriceps no es capaz de responder a esta demanda, la persona que se sienta cae bruscamente en un asiento en vez de descender de forma gradual.
- 36. A una velocidad cómoda el sujeto aplica un poco menos de peso del cuerpo sobre el pie plano en el suelo. Tres factores son responsables de la forma característica de la curva “dorso camello” proporcionada por la plataforma de fuerzas. La flexión súbita de la rodilla en el momento del contacto con el suelo “descarga” en parte el paso de la unidad CBT. El miembro inferior contra lateral, lanzado arriba, reduce en parte el peso estático. Los miembros superiores también se mueven por un impulso dirigido.
- 37. Tercer Tiempo Principal: Despegue del Pie Desde el inicio de la fase de oscilación los músculos de la fase de apoyo se relajan, excepto los del comportamiento anterior a la pierna, que mantienen al pie para que no caiga. Los flexores de cadera actúan brevemente entre ellos, el recto anterior desempeña un doble papel de flexor de cadera y “frenador” de la flexión de la rodilla inducida por el mecanismo del doble péndulo, los aductores de la cadera ayudan a su flexión y controlan la estabilidad del miembro inferior en rotación.
- 39. Posición del muslo respecto a la Pelvis Para valorar la actividad muscular alrededor de la cadera es útil observar la posición del muslo respecto a la vertical virtual (Pág. 120). Un déficit de flexión señala la debilidad de los flexores, pero la alteración mas frecuente es la ausencia de extensión que se mantiene al redero del 50% del ciclo y cuya ausencia indica una retracción de los flexores de cadera o una rigidez de estructuras fibrosas capsulares y peri articulares.
- 40. Final del apoyo y despegue del talón Los aductores de cadera entran en acción cuando se eleva el talón adelantando el muslo y haciéndolo pasar de una rotación interna relativa a una rotación externa relativa. Después del despegue del talón la tensión ejercida por el tríceps sural se transmite a la base de los dedos a través de la aponeurosis plantar y simultáneamente la dorsiflexión pasiva de los dedos.
- 42. Presiones del Antepié La presión se reparte sobre la superficie total del antepié y se ejerce a nivel del segundo metatarsiano el que con mayor frecuencia presenta fracturas por sobrecargas.
- 43. Despegue de los Dedos Los dedos abandonan el suelo durante el ciclo alrededor del 60%. El ultimo contacto se realiza en el pulpejo del dedo gordo, el talón contra lateral ya esta en contacto con el suelo.
- 44. Cuarto Tiempo Principal: Avance del Miembro Inferior Anomalías debidas al flexor de Cadera La persistencia de una rigidez de la cadera en flexión pronunciada, provoca una marcha peculiar: un paso largo, el miembro inferior como elevado bruscamente, seguido de un paso corto. El pie se coloca a nivel del que acaba de avanzar. La disfunción se encuentra en el lado del paso más largo. La anomalía puede combatirse con una recuperación de la extensión de la cadera.
- 45. Flexión de la Rodilla Durante la oscilación (acortamiento del MI) no aparece depender de una acción de los músculos posteriores del muslo. Se trata de una acción balística en doble péndulo: la aceleración hacia adelante del muslo desencadena una contraaceleración hacia atrás de la pierna. La aceleración hacia atrás es frenada por un pico del cuádriceps, también por el recto anterior, capaz de acelerar el muslo y frenar la inercia de la pierna.
- 47. Deslizamiento del pie apenas separado del suelo Los dedos evitan el suelo por una distancia pequeña alrededor de 1cm. El pie parece <<deslizarse>> a lo largo del suelo y no se eleva hasta el último segundo, antes del contacto del talón. Sobre un calzado blando ya utilizado, se encuentra la huella del primer dedo que se eleva con más vigor que los demás.
- 49. Extensión de la Rodilla Se extiende después del periodo de acortamiento del MI. Hacia el final de la fase de oscilación, cuando el talón toca el suelo, el sujeto entra en una fase muy breve del doble contacto. Los isquiotibiales entran en contracción antes del contacto con el suelo, frenando la extensión de la rodilla. Estabilizan la rodilla mediante coactivación del cuádriceps.
- 50. Contacto con el suelo Cuando el talón toca el suelo por segunda vez, se completa el ciclo de la marcha. Este análisis talón- talón (100% del ciclo de la marcha) permite observar a los individuos normales y a los pacientes.
- 51. Ajuste preciso de las Actividades Musculares de Frenado Son poco numerosas de intensidad restringida, los periodos de frenado son ala vez más frecuentes y regulados. Niveles de Regulación: 1.Control del pie en el momento del contacto con el suelo. 2.Control del descenso de la pelvis en el momento del contacto con el suelo. 3.Control de la caída relativa del pie durante la fase de oscilación. 4.Control de la rigidez de atenuación de la resistencia viscoelástca opuesta al avance de la pierna, a fin de estabilizar la rodilla.
- 52. Acciones coordinadas de los Músculos de los MI Son capaces de funcionar de forma automática, sin que el sujeto asuma un control consciente de las actividades hasta que percibe un obstáculo. Presencia de una generador rítmico (central pattem generator, CPG) que se encuentra en la médula espinal. Este órgano es capaz de controlar las interacciones complejas entre las fuerzas de frenado y propulsión esenciales para la marcha normal, actuando sobre actividades de tensado o <<rigidez activa>>, que garantizan la ejecución secuencial conocidas <<memoria motriz>>.
- 54. Ahorro Energético por la utilización de los Músculos Pluriarticulares La utilización adecuada de músculos que abarcan varios segmentos constituye una notable solución mecánica a necesidades inversas (Elftman en 1996). El recto anterior participa en la aceleración del muslo y el frenado de la pierna, los isquiotibiales frenan la extensión de la rodilla y estabilizan la pelvis, limitando la velocidad horizontal del pie.
- 56. Acciones Dinámicas Intersegmentarias Las acciones coordinadas de los cuatro miembros, permiten anticipar las necesidades de compensación rápida de los desequilibrios y ahorrar una parte de la energía de propulsión por recuperación de energía cinética. Esta interacción mecánica provoca la activación de segmentos adyacentes y la utilización de músculos pluriarticulares. • Parte pasiva (recuperación de energía cinética). • Parte activa (desencadenamiento de contracciones).
- 57. Equilibrio Estático y Dinámico Los datos del análisis del equilibrio estático (verticalidad estable), no se aplican al equilibrio dinámico (verticalidad inestable). Cuando pasa de la posición de parada (equilibrio estático) a la progresión (equilibrio dinámico), el cuerpo adopta un modo de equilibrarse distinto. Una marcha más rápida y vigorosa recluta los músculos, en funciones de frenado de segmentos que han almacenado energía cinética, llevando demasiado lejos a las pares móviles del cuerpo, creando un desequilibrio dinámico.