Arcos
•
13 recomendaciones•35,431 vistas

un arco es una estructura plana constituida por un elemento curvo de seccion transversal despreciable frente a su longitud

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Arcos
Similar a Arcos (20)
Arcos
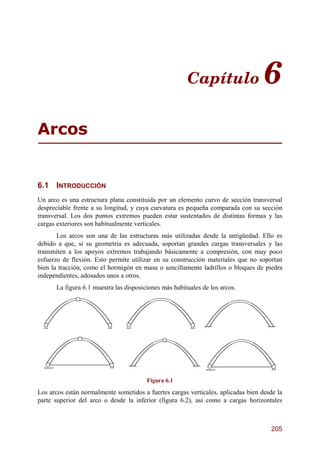
- 1. &DSÇWXOR $UFRV 6.1 INTRODUCCIÓN Un arco es una estructura plana constituida por un elemento curvo de sección transversal despreciable frente a su longitud, y cuya curvatura es pequeña comparada con su sección transversal. Los dos puntos extremos pueden estar sustentados de distintas formas y las cargas exteriores son habitualmente verticales. Los arcos son una de las estructuras más utilizadas desde la antigüedad. Ello es debido a que, si su geometría es adecuada, soportan grandes cargas transversales y las transmiten a los apoyos extremos trabajando básicamente a compresión, con muy poco esfuerzo de flexión. Esto permite utilizar en su construcción materiales que no soportan bien la tracción, como el hormigón en masa o sencillamente ladrillos o bloques de piedra independientes, adosados unos a otros. La figura 6.1 muestra las disposiciones más habituales de los arcos. Figura 6.1 Los arcos están normalmente sometidos a fuertes cargas verticales, aplicadas bien desde la parte superior del arco o desde la inferior (figura 6.2), así como a cargas horizontales 205
- 2. 206 Curso de análisis estructural debidas a empujes de viento, frenado, etc. Son también frecuentes las cargas térmicas o las debidas a los asientos de los apoyos, que pueden ser importantes en arcos de gran tamaño. Figura 6.2 Es posible encontrar también arcos formando parte de otras estructuras planas más complejas, del tipo celosía o pórtico (figura 6.3). Figura 6.3 6.2 GENERALIDADES 6.2.1 Hipótesis fundamentales La hipótesis fundamental para el estudio de los arcos es que su curvatura es pequeña en comparación con las dimensiones transversales de su sección o lo que es lo mismo, que el radio de curvatura es mucho mayor que el canto de la sección. Esta simplificación es aplicable normalmente si la relación entre el radio de curvatura y el canto es superior a 10. La suposición de pequeña curvatura hace que no sea necesario aplicar una teoría especial de piezas curvas, sino que es directamente aplicable la teoría convencional de flexión de vigas, considerando únicamente que el dominio de la estructura es curvo. Los primeros trabajos sobre arcos empleando estas hipótesis se deben a Navier (1826) y a Bresse (1854). La energía acumulada en un arco tiene la misma expresión que para un pórtico plano, pero sustituyendo la coordenada longitudinal x por la longitud del arco s. U* = I N2 2 EA I ds + M2 2 EI I I ds + NαTm ds − MαTg ds (6.1) siendo N el esfuerzo axial y M el momento flector en una sección cualquiera del arco. La variación de temperatura a lo largo de la sección del arco se supone lineal, definida por sus valores medio Tm y gradiente Tg. Tanto el esfuerzo axial como el momento flector son en general variables a lo largo de la directriz. El canto normalmente también es variable. Habitualmente no se considera la energía debida al esfuerzo cortante pues, por su propia definición, los arcos son esbeltos, con lo que la energía de cortante no es significativa. En muchos casos también se desprecia la energía de esfuerzo axial, como se ve más adelante.
- 3. Arcos 207 6.2.2 Ecuaciones de equilibrio Para hallar las ecuaciones de equilibrio se aísla un elemento ∆s que corresponde a un ángulo ∆ϕ , tal y como se muestra en la figura 6.4. qs ∆s Q+∆Q M M+∆M N ∆ϕ N+∆N Q Figura 6.4 • Equilibrio radial de fuerzas ∆ϕ ∆ϕ ∆ϕ ∆ϕ (Q + ∆Q) cos − Q cos − ( N + ∆N )sin − N sin − q s ∆s = 0 (6.2) 2 2 2 2 Cuando ∆s tiende a cero el ángulo ∆ϕ también lo hace, y el seno y el coseno del mismo tienden a: ∆ϕ ∆ϕ ∆ ϕ ∆s cos →1 sin → = (6.3) 2 2 2 2R siendo R el radio de curvatura de la sección. Sustituyendo estos valores, dividiendo por ∆s y tomando el límite cuando ∆s → 0 la ecuación de equilibrio radial queda: dQ N = qs + (6.4) ds R Esta ecuación es equivalente a la de las vigas rectas, con la diferencia de que en ella hay un nuevo término en el que intervienen el esfuerzo axial N y el radio de curvatura R. Si este radio de curvatura tiende a infinito, la ecuación anterior coincide con la habitual de las vigas rectas. • Equilibrio de momentos Tomando momentos en el elemento diferencial respecto a su lado derecho se obtiene: ∆ϕ ∆ϕ ∆ϕ ∆ϕ ∆ϕ ( M + ∆M ) − M + qs ∆s R sin 2 + Q cos 2 2 R sin 2 + N sin 2 2 R sin 2 =0 (6.5) Procediendo igual que con la ecuación de equilibrio de fuerzas se llega a: dM = −Q (6.6) ds que es la ecuación equivalente a la de flexión de vigas rectas.
- 4. 208 Curso de análisis estructural 6.3 ARCO TRIARTICULADO Se trata de una estructura isostática, cuya disposición geométrica general puede verse en la figura 6.5. No se especifica en principio su forma, sino sólo la posición de los apoyos A, B y de la clave C. C fB B fA h A LA LB Figura 6.5 Las reacciones en las articulaciones se pueden hallar aislando los dos elementos AC y CB, como se indica en la figura 6.6. Tomando momentos respecto de A en el elemento AC, y respecto de B en el elemento CB, se obtiene: −Cx f A + Cy L A + M A extAC =0 (6.7) Cx f B + C y L B + M B extCB =0 (6.8) donde: extAC M A es el momento respecto de A de las fuerzas exteriores comprendidas entre A y C, y extCB MB es el momento respecto de B de las fuerzas exteriores entre C y B. Ambos momentos se consideran positivos en sentido antihorario. De las dos ecuaciones anteriores se obtienen las reacciones en la clave C. extCB extAC Cy Fy FY Cx extAC extCB FX Fx x AC Cy x CB AC y y CB Ay By Ax Bx Figura 6.6 Las reacciones en los apoyos se obtienen del equilibrio de fuerzas horizontal y vertical de cada tramo: Ax = −C x − FxextAC Ay = −C y − FyextAC (6.9) Bx = Cx − FxextCB By = Cy − FyextCB (6.10)
- 5. Arcos 209 6.3.1 Esfuerzos internos Los esfuerzos en el interior del arco se obtienen aislando un tramo AP, donde P es un punto cualquiera situado entre A y B (figura 6.7). El origen del sistema de coordenadas se sitúa en A, con lo que las coordenadas de P son x,y. El momento flector M se obtiene extAP FY Q N M tomando momentos respecto de P: extAP FX M = Ay x − Ax y − M P extAP (6.11) P extAP MP extAP donde M P es el momento respecto de P y de las fuerzas exteriores aplicadas entre A y Ay P. Se considera positivo en sentido antihorario. Ax x Figura 6.7 Los esfuerzos axial N y cortante Q se obtienen aplicando el equilibrio de fuerzas en las direcciones X e Y: N cos α − Q sin α + Ax + FxextAP = 0 (6.12) N sin α + Q cos α + Ay + FyextAP = 0 (6.13) donde FxextAP , FyextAP son las resultantes, según X e Y, de las fuerzas exteriores aplicadas entre A y P. El valor que se obtiene para el esfuerzo axial es: N = −( Ax + FxextAP ) cos α − ( Ay + FyextAP )sin α (6.14) 6.3.2 Deformación en la clave La deformación vertical en la clave C se obtiene aplicando el método de la fuerza virtual unitaria. La figura 6.8. muestra el caso virtual. V C Cy V Cx V=1 V Cy By V V=1 V Ay V V Bx Ax Figura 6.8 Tomando momentos respecto de A en AC, y respecto de B en CB se obtiene: C x f A + 1L A − C y L A = 0 V V (6.15) C x f B + C y LB = 0 V V (6.16) de donde se calculan las reacciones en la clave en el caso virtual:
- 6. 210 Curso de análisis estructural L A LB − LA f B Cx = V Cy = V (6.17) f A LB + f B L A f A LB + f B L A Las reacciones en los apoyos son: − L A LB 2 L A f B + f A LB Ax = − C x = V V Ay = 1 − C y = V V (6.18) f A LB + f B L A f A LB + f B L A L A LB − LA f B Bx = C x = V V By = C y V = V 0 (6.19) f A LB + f B L A f A LB + f B L A Los esfuerzos en el caso virtual se indican en la figura 6.9. ♦ Tramo AC Q V V NV M M V = Ay x − Ax y V V (6.20) P N V = − Ax cos α − Ay sin α V V (6.21) V y Ay V Ax x ♦ Tramo CB V Q V M M = V V Ay x − Ax y − 1( x V − LA ) (6.22) V P N N V = − Ax cos α − Ay sin α + 1 sin α V V (6.23) 1 V y Ay V Ax x Figura 6.9 La deformación en la clave se obtiene aplicando el teorema de Crotti-Engesser, con la expresión de la energía dada por la ecuación (6.1): ∆ CY = ∂U ∂V * V =0 = I I I Nγ N V ds + Mµ M V ds + αTm N V ds − αTg M V ds I (6.24) 6.3.3 Arco sin momento flector Sea un arco triarticulado simétrico, cargado con una carga distribuida uniforme q, como se muestra en la figura 6.10. Se desea determinar qué forma debe tener el arco para que no aparezcan momentos en él.
- 7. Arcos 211 q q Cx y f Ay x Ax L Figura 6.10 La reacción vertical en la clave es nula por simetría (ver capítulo 9). Aislando el tramo AC se obtienen las restantes reacciones: qL2 qL2 qL Cx = − Cy = 0 Ax = Ay = (6.25) 8f 8f 2 El momento flector en un punto P situado q N en unas coordenadas x,y es (figura 6.11): Q α y qL qL2 qx 2 M= x− y− (6.26) M 2 8f 2 qL/2 qL2/8f x Figura 6.11 Imponiendo la condición M=0 y despejando la coordenada y en función de la x se obtiene la ecuación de la forma del arco, que es una parábola simétrica con la concavidad hacia abajo: 4f y= ( Lx − x 2 ) (6.27) L2 • El esfuerzo axial es: qL qL2 N = qx sin α − sin α − cos α (6.28) 2 8f • El esfuerzo cortante es: qL2 qL Q = qx cos α + sin α − cos α (6.29) 8f 2 Teniendo en cuenta la relación geométrica sin α dy 4 f = tgα = = ( L − 2 x) (6.30) cos α dx L2 se obtiene:
- 8. 212 Curso de análisis estructural qL2 4 f qL Q = qx cos α + 2 ( L − 2 x ) cos α − cos α = 0 (6.31) 8f L 2 Es decir que el arco está sometido únicamente a un esfuerzo axial, sin flexión ni cortante. Este resultado explica el interés de usar arcos de directriz parabólica para soportar cargas verticales, pues se pueden utilizar materiales que no soportan la tracción ni el esfuerzo cortante, o incluso elementos aislados, ya que éstos se sujetan unos a otros por rozamiento al estar el arco siempre a compresión. 6.4 ARCO BIARTICULADO Este arco es hiperestático de grado h=1 (figura 6.12). Para su análisis se elige como incógnita redundante la reacción horizontal en el apoyo izquierdo Ax . B y z=y-x h/L h A ϕ x L Figura 6.12 Por superposición, los valores del esfuerzo axial N y del momento flector M son: N = N 0 + Ax N 1 M = M 0 + Ax M 1 (6.32) • Caso 0 (figura 6.13). La reacción vertical en A se obtiene tomando momentos respecto de B de todo el arco: −MB extAB Ay = 0 (6.33) L Los esfuerzos axial y cortante y el momento flector valen: N 0 = Ay sin α − FxextAP cos α − FyextAP sin α 0 (6.34) Q 0 = − Ay cos α − FyextAP sin α + FxextAP cos α 0 (6.35) M 0 = Ay x + M P 0 extAP (6.36) donde el superíndice extAP se refiere a todas las fuerzas exteriores actuantes entre A y P.
- 9. Arcos 213 Q 0 N0 M0 B F extAP α 0 Ay Figura 6.13 • Caso 1 (figura 6.14). La reacción vertical en A se obtiene, como en el caso 0, tomando momentos respecto de B de todo el arco: h A1 = y (6.37) L Los esfuerzos axial y cortante y el momento flector valen: h N 1 = − cos α − sin α (6.38) L h Q1 = sin α − cos α (6.39) L h M1 = x − y = −z (6.40) L Q 1 N1 M1 B α 1 Ay=h/L z 1 Figura 6.14 • La condición de compatibilidad se obtiene aplicando el segundo teorema de Engesser a I I I I la energía complementaria dada por la expresión (6.1): Nγ N 1ds + MµM 1ds + αTm N 1ds − αTg M 1ds = 0 (6.41) Sustituyendo en la ecuación anterior el valor de los distintos esfuerzos y despejando, se I I I I obtiene el valor de la reacción hiperestática: N 0γ N 1ds + M 0 µM 1ds + αTm N 1ds − αTg M 1ds Ax = − I N γ N ds + M µM ds 1 1 I 1 1 (6.42) • Los esfuerzos finales en el arco son:
- 10. 214 Curso de análisis estructural hx M = M 0 + Ax ( − y) = M 0 − Ax z (6.43) L h N = N 0 + Ax ( − cos α + sin α ) (6.44) L Arco rígido axialmente, sin cargas térmicas Una simplificación muy frecuente es despreciar la energía de esfuerzo axial, empleando γ=0. Suponiendo que no hay cargas térmicas sobre el arco y sustituyendo el valor de M 1 = − z en la expresión de la reacción se obtiene: IM 0 µ zds Ax = I z 2 µ ds (6.45) El momento flector es: I M µzds 0 M = M0 − z I z µds 2 (6.46) que es una expresión también muy habitual en el diseño de arcos. Arco de inercia variable según la ley de la secante En muchas ocasiones se diseña la sección transversal del arco de tal forma que su rigidez a flexión varíe según la ley: EI = ( EI )0 sec α µ = µ 0 cos α (6.47) donde (EI)0 es la rigidez a flexión en la clave del arco y µ 0 es la flexibilidad correspondiente. Esta ley de variación no es excesivamente complicada de obtener y simplifica mucho los cálculos posteriores. En efecto, las integrales extendidas a la longitud I I I del arco se pueden poner como: µ f ( x )ds = µ 0 f ( x ) cos α ds = µ 0 f ( x )dx (6.48) S S L con lo cual basta con integrar en la coordenada x, que es mucho más sencillo. Arco simétrico con carga vertical Muchas veces los arcos se diseñan para minimizar el momento flector y para ello se da a su directriz una forma que coincide con el polígono funicular de las fuerzas exteriores. En arcos simétricos diseñados de esta manera y sometidos solamente a cargas verticales, se cumple que la componente horizontal del esfuerzo axial se mantiene constante. Además esta componente horizontal es igual a la reacción horizontal en el apoyo A, al haber sólo cargas verticales. N cos α = − Ax = C te (6.49) Con esta simplificación los esfuerzos en el caso 1 son:
- 11. Arcos 215 N 1 = − cos α M1 = − y (6.50) I I I I La ecuación de compatibilidad (6.41) queda: Nγ ( − cos α )ds + ( M 0 − Ax y)µ ( − y)ds + αTm ( − cos α )ds − αTg ( − y)ds = 0 (6.51) I I I I En la primera integral se identifica el valor de la reacción horizontal en A: Axγ ds + ( − M 0 + Ax y)µ yds − αTm cos α ds + αTg yds = 0 (6.52) I I I Al ser Ax constante, se obtiene: M 0 µ yds + αTm dx − αTg yds Ax = I I γ ds + y µ ds 2 (6.53) Esta fórmula es también muy utilizada para el cálculo práctico de arcos, si el diseño de su directriz se efectúa tal y como se ha indicado antes. 6.5 ARCO BIARTICULADO ATIRANTADO Es frecuente el empleo de un tirante de sujeción entre los dos apoyos, con objeto de eliminar la componente horizontal de la reacción en un apoyo. De hecho, si todas las cargas son verticales este arco no produce ninguna reacción horizontal sobre el terreno. B ρt λt A Figura 6.15 Se supone que el tirante tiene una flexibilidad axial de valor ρ t y que en él hay un esfuerzo de pretensión inicial N 0 t definido por un alargamiento equivalente λ t : λ t = − N0t ρ t (6.54) El arco es hiperestático de grado 1, y para su análisis se adopta como incógnita redundante X el esfuerzo en el tirante. Se identifica con el subíndice a al esfuerzo axial del arco y con t al del tirante. • Caso 0 Este caso (figura 6.16) es igual que el caso 0 del arco biarticulado, por lo tanto los esfuerzos son los mismos que en él. El esfuerzo en el tirante es nulo.
- 12. 216 Curso de análisis estructural Caso 0 B N0 M0 A Figura 6.16 • Caso 1. Se aplica un valor unidad al esfuerzo en el tirante, como se observa en la figura 6.17. Los esfuerzos que se producen son: N a = − cos α cos ϕ − sin α sin ϕ = − cos(α − ϕ ) 1 N t1 = 1 M 1 = − z' (6.55) donde se ha empleado la coordenada z' medida perpendicularmente desde el tirante al arco. Caso 1 Q 1 N1 M 1 B α N1M1 z' AY=0 1 1 ϕ Figura 6.17 • Los esfuerzos finales en el arco y en el tirante son: Na = Na + X Na 0 1 Nt = Nt0 + X Nt1 = 0 + X = X (6.56) • La energía acumulada en la estructura es la suma de la del arco y la del tirante: Nt2 ρ t U * = Ua + Ut* = Ua + * * + Nt λ t (6.57) 2 • La ecuación de compatibilidad se obtiene aplicando el segundo teorema de Engesser: I I I I N aγ N a ds + Nt ρ t Nt1 + MµM 1ds + αTm Na ds − αTg M 1ds + λ t Nt1 = 0 1 1 (6.58) I I I I Despejando el valor del esfuerzo en el tirante se obtiene: Na γ N a ds + M 0 µ M 1ds + αTm N a ds − αTg M 1ds + λ t Nt1 0 1 1 X=− I I γ N a N a ds + M 1µ M 1ds + ρ t Nt1 Nt1 1 1
- 13. Arcos 217 I I I − N a γ cos(α − ϕ )ds − M 0 µ z' ds − αTm cos(α − ϕ )ds + αTg z' ds + λ t 0 I X=− I I γ cos (α − ϕ )ds + µ z' ds + ρ t 2 2 (6.59) • Los esfuerzos finales son: M = M 0 − X z' N a = N a − X cos(α − ϕ ) 0 Nt = X (6.60) Caso particular. Arco rígido axialmente Despreciando la energía de esfuerzo axial acumulada en el arco y considerando que no hay I variaciones de temperatura, se obtiene la siguiente expresión del esfuerzo en el tirante: M 0 µ z' ds − λ t X= I µ z' 2 ds + ρ t (6.61) 6.6 ARCO BIEMPOTRADO El arco biempotrado (figura 6.18) es hiperestático de grado 3, y para su estudio se consideran como incógnitas hiperestáticas los tres esfuerzos en el apoyo A: Ax , Ay , M A . B A Figura 6.18 • Caso 0. Los esfuerzos en este caso dependen de las cargas exteriores y son: N 0 , M 0 , Q 0 . • Caso 1. Se aplica un valor unitario de la reacción horizontal, y los esfuerzos son: M1 = − y N 1 = − cos α (6.62) Q0 N0 Q1 N1 y y M0 M1 Caso 0 Caso 1 Ax=1 x x
- 14. 218 Curso de análisis estructural Q2 N2 Q 3=0 N 3=0 y y M 2 M 3=-1 Caso 2 Caso 3 Ay=1 M A=1 x x Figura 6.19 • Caso 2. Se aplica un valor unidad de la reacción vertical y los esfuerzos son: M2 = x N 2 = − sin α (6.63) • Caso 3. Al aplicar un valor unidad al momento los esfuerzos que se producen son: M 3 = −1 N3 = 0 (6.64) I I I I Las tres condiciones de compatibilidad son: Nγ N j ds + Mµ M j ds + αTm N j ds − αTg M j ds = 0 j = 1,3 (6.65) siendo: M = M 0 − yAx + xAy − M A N = N 0 − Ax cos α − Ay sin α (6.66) Sustituyendo el valor de M, pero no el de N, y desarrollando se llega a un sistema de tres I I I I ecuaciones y tres incógnitas, que se puede poner de forma matricial como: I #% A ( % K=K Nγ cos αds + αTm cos α ds − αTg yds + M 0 µ yds ( K I I I I − I11 I01 K ) K K ## A K M µ xds ) 02 x − I11 − I10 Nγ sin αds + αTm sin α ds − αTg xds − I I 0 $KM * K K I20 y (6.67) ! I01 − I10 I00 ' A K ' − αTg ds + M µds0 K * donde la matriz del sistema es la matriz de flexibilidad del arco en el apoyo A, cuyos I términos valen: Imn = x m y n µ ds (6.68) Estos coeficientes representan las propiedades geométricas de una sección plana, cuya directriz es una curva con la forma del arco, y cuyo espesor corresponde a la flexibilidad a flexión µ. El sistema de ecuaciones anterior no puede resolverse, pues contiene el valor de N en el término independiente. Sustituyendo dicho valor de N, y desarrollando se obtiene:
- 15. Arcos 219 I #% A ( % K=K I I I I N 0γ cos α ds + αTm cos α ds − αTg yds + M 0 µ yds ( K I I I I + J 02 − I11 + J11 I01 K ) K K ## A K M µ xds ) (6.69) 02 x − I11 + J11 I20 + J20 − I10 N 0γ sin α ds + αTm sin α ds − αTg xds − I I 0 $KM * K K y ! I01 − I10 I00 ' A K ' − αTg ds + M 0 µds K * Los coeficientes Jmn son los términos de la matriz de flexibilidad debidos al esfuerzo axial, I cuyo valor es: J mn = γ sin m α cos n α ds (6.70) El sistema de ecuaciones anterior permite hallar las tres reacciones en A, y a partir de ellas se pueden calcular los diagramas de flectores y de axiales, empleando las ecuaciones (6.66). Sin embargo, es posible efectuar algunas simplificaciones que facilitan su resolución, como las que se indican a continuación. Arco rígido axialmente En este caso la flexibilidad axial es nula, γ=0, con lo cual los coeficientes Jmn son también nulos y las ecuaciones que proporcionan las reacciones en A se simplifican: I − I11 I01 #% A K ( %I αT cosαds − I αT yds + I M µyds( K = K I αT sin αds − I αT xds − I M µxds K m g 0 ## A ) ) 02 x − I11 − I10 0 $KM K K − I αT ds + I M µds K I20 y m g (6.71) ! I01 − I10 I00 ' A * ' g 0 * Arco simétrico con cargas verticales Si un arco simétrico, sometido únicamente a cargas simétricas y verticales, se diseña con una directriz que corresponda al polígono funicular de las cargas, ocurre que la componente horizontal del esfuerzo axial es constante e igual a la reacción horizontal en los apoyos. N cos α = − Ax = C te → N = − Ax / cos α (6.72) Sustituyendo en la ecuación (6.67) y reagrupando términos se obtiene: I I #% A ( %I αT I I ( ) K K + γ ds − I11 cos α ds − αTg yds + M 0 µ yds ##K A K = I I I01 m ) 02 x − I11 − I10 − αTg xds − M µ xds0 $KM K K I I K I20 y (6.73) ! I01 − I10 I00 ' * ' A − αTg ds + M µds 0 * donde se ha tenido en cuenta que las integrales del tipo sinα y tanα son nulas por ser el arco simétrico. 6.7 ARCO BIEMPOTRADO. CENTRO ELÁSTICO Tradicionalmente se ha efectuado el estudio de los arcos biempotrados mediante el empleo del llamado centro elástico. Esta técnica se basa en el método de flexibilidad, tal y como se ha presentado en el apartado anterior, y trata únicamente de simplificar el proceso de cálculo, evitando la resolución del sistema final de tres ecuaciones con tres incógnitas.
- 16. 220 Curso de análisis estructural Para el empleo de este método se define una sección plana equivalente al arco, cuya directriz es una curva con la forma de la directriz del arco y cuyo espesor corresponde a la flexibilidad a flexión µ. Se considera asimismo que el arco es infinitamente rígido a esfuerzo axial γ=0. Se define el centro elástico del arco como un punto E, situado en el centro de gravedad de la sección plana equivalente al arco. Con esta definición sus coordenadas son: I xµds Iyµds I I I10 I01 xE = = yE = = (6.74) µds I00 µds I00 Además, se define un sistema de ejes ξ,η situado en el punto E, de tal manera que sean los ejes principales de inercia de la sección plana equivalente (figura 6.20a). El ángulo ϕ que forman estos ejes con el sistema inicial X,Y viene dado por la expresión: 2 I11 tan 2ϕ = (6.75) I20 − I02 Una vez definido este sistema de ejes, se traslada el empotramiento del apoyo A hasta el punto E, a base de conectar A con E mediante un elemento infinitamente rígido tanto a flexión como axialmente, y que por lo tanto no acumula energía alguna (figura 6.20.b). Con esta sustitución el arco se comporta de la misma forma, y sólo varían las reacciones, que son distintas en A y en E. η ξ B η ξ B ϕ E E A y a) A x b) Figura 6.20 A continuación se procede a efectuar el análisis del arco tomando como incógnitas hiperestáticas las tres reacciones en el empotramiento situado en E. Este análisis se descompone en los cuatro casos que se muestran en la figura 6.21. • Caso 0. Los esfuerzos en este caso dependen de las cargas exteriores y son N 0 , M 0 , Q 0 . • Caso 1. Los esfuerzos son: M 1 = −η N 1 = − cos β (6.76) donde se ha denominado β al ángulo que forma la tangente al arco con el eje ξ. Por lo tanto se cumple que β=α-ϕ.
- 17. Arcos 221 Caso 0 Q0 N0 Caso 1 Q1 N1 β M0 M1 η η ξ ξ ϕ Eξ=1 Caso 2 Q2 N2 Caso 3 N 3=0 Q 3=0 M2 M 3= -1 Eη=1 ξ ME=1 Figura 6.21 • Caso 2. Los esfuerzos son: M2 = ξ N 2 = − sin β (6.77) • Caso 3. Los esfuerzos son: M 3 = −1 N3 = 0 (6.78) Obsérvese que las expresiones analíticas de los esfuerzos en los casos 1 a 3 son iguales que las obtenidas en el apartado 6.6, cambiando sólo las coordenadas x,y por las ξ,η y el ángulo α por el β . Los momentos flectores y esfuerzos axiales en el caso 0 son también los mismos que en dicho apartado, aunque sus expresiones analíticas serán asimismo diferentes. • Las tres condiciones de compatibilidad son: I I I MµM j ds + αTm N j ds − αTg M j ds = 0 j = 1,3 (6.79) siendo: M = M 0 + M 1 Eξ + M 2 Eη + M 3 (6.80) Sustituyendo M y desarrollando las ecuaciones de compatibilidad se obtiene:
- 18. 222 Curso de análisis estructural I e 0 #% E 0 K ξ ( %I αT cos β ds − I αT η ds + I M µη ds( K = K I αT sin β ds − I αT ξ ds − I M µξ ds K m g 0 0 # E ) ) 02 e 0 I #KM K K − I αT ds + I M µ ds K 0 I20 η m g (6.81) ! 0 0 $' 00 E * ' g * 0 En estas ecuaciones ya se han tenido en cuenta las propiedades del arco respecto de los ejes ξ,η, por ser principales de inercia de la sección equivalente: I ξµds = 0 I ηµds = 0 Iξηµds = 0 (6.82) y se han definido los momentos de segundo orden respecto de estos ejes principales: e I I20 = ξ 2 µds I I02 = η 2 µds e (6.83) Las tres ecuaciones (6.81) están desacopladas, por lo que se pueden calcular con facilidad las tres reacciones en el centro elástico. Conocidas éstas, los valores del momento flector y del esfuerzo axial en un punto cualquiera del arco son: M = M 0 − η Eξ + ξ Eη − ME N = N 0 − Eξ cos β − Eη sin β (6.84) La relación entre las reacciones en A y en E se obtiene estableciendo el equilibrio del segmento rígido AE. Empleado para las reacciones en A el mismo criterio de signos que en la figura 6.19. se obtiene: Eξ = Ax cos ϕ + Ay sin ϕ Eη = Ay cos ϕ − Ax sin ϕ (6.85) M E = M A + Ay ( x A − x E ) − Ax ( y A − yE ) Como puede observarse, el método del centro elástico lo único que hace es aplicar un cambio de ejes de tal forma que las ecuaciones de compatibilidad (6.71) queden desacopladas en los nuevos ejes, para facilitar su resolución por separado. 6.8 ANALOGÍA DE LA COLUMNA Se supone un arco infinitamente rígido a esfuerzo axial, cargado de forma arbitraria pero sin variaciones de temperatura. La expresión del momento flector en un punto cualquiera se puede calcular empleando el método del centro elástico. Para ello se resuelven las tres ecuaciones (6.81) y se sustituyen los resultados en la (6.84). Al no haber variaciones de I I I temperatura se obtiene el siguiente valor del momento flector: M 0 µηds M 0 µξds M 0 µds M = M −η 0 e −ξ e − (6.86) I02 I20 I00 Para crear una analogía entre el arco y una columna, se supone una columna de material perfectamente rígido, cuya sección transversal coincide con la directriz del arco y cuyo espesor es igual al valor de la flexibilidad a flexión e=µ. La columna se supone apoyada en su base en un suelo también rígido, como se muestra en la figura 6.22.
- 19. Arcos 223 Se carga la columna en su parte superior con una carga distribuida vertical q, cuyo valor corresponde al momento flector en el arco en el caso 0, es decir: q=M0. Esta carga se supone positiva cuando actúa hacia abajo, comprimiendo la columna. Como reacción aparece una distribución de presiones en la base de la columna, que se denomina p y se considera positiva cuando actúa hacia arriba. η q=M 0 ξ q Mξ q Mη Rq p=M 0 -M Figura 6.22 El valor de la presión en un punto cualquiera, situado en la base de la columna, y cuyas coordenadas son ξ,η, es: q q Mξ Mη Rq p=η +ξ + (6.87) Iξ Iη A siendo: R q la resultante de la carga distribuida: I I R q = qdA = M 0 µds (6.88) Mξ , Mη los momentos de la carga distribuida exterior q, respecto de los ejes ξ,η: q q q I Mξ = qη dA = I M 0ηµ ds I I Mη = qξ dA = M 0ξµ ds q (6.89) I I I A el área de la sección de la columna: A = dA = eds = µ ds = I00 (6.90) Iξ , Iη los momentos de inercia de la sección de la columna respecto de los ejes ξ,η. e e Estos momentos de inercia coinciden con I 02 , I20 respectivamente: I Iξ = η 2 µds = I02 e I Iη = ξ 2 µds = I20 e (6.91) Sustituyendo los valores de las distintas magnitudes en la expresión (6.87) de la presión en la base se obtiene:
- 20. 224 Curso de análisis estructural p=η I M 0 µηds e I02 +ξ I M 0 µξds e I20 + I M 0 µds I00 (6.92) Comparando esta expresión de la presión en la base de la columna con la del momento flector en un punto del arco (6.86), se observa que son iguales, a diferencia del signo menos y de la ausencia del momento isostático. Se puede poner por lo tanto que: M = M0 − p (6.93) Esta expresión permite establecer una analogía entre el diagrama de momentos flectores del arco M, y la presión en la base de la columna p, que son iguales a diferencia del momento isostático, según la ecuación anterior. La analogía de la columna brinda un método sencillo e intuitivo para la determinación del momento flector en un arco en las condiciones establecidas, pues basta con calcular el diagrama de momentos isostáticos y aplicar la analogía con las presiones en la base de la columna para obtener el momento flector real. 6.9 EJERCICIOS RESUELTOS 6.9.1 Calcular los esfuerzos internos en un arco biarticulado simétrico, con directriz parabólica definida por su flecha f y su luz L, y que está sometido a una carga uniforme hacia abajo q. Despreciar la energía de esfuerzo axial, y suponer que la rigidez a flexión varía según la ley de la secante. q y f x L Figura 6.23 La directriz del arco es: 4f dy 4 f y= ( Lx − x 2 ) = (L − 2x) L2 dx L2 La flexibilidad a flexión sigue la ley µ = µ 0 cos α , donde µ 0 es la flexibilidad en la clave.
- 21. Arcos 225 Tomando como incógnita hiperestática la q N0 reacción horizontal en el apoyo izquierdo (figura Q 0 α 6.24), el diagrama de flectores del caso 0 es: M0 q M0 = ( Lx − x 2 ) 2 qL/2 x Figura 6.24 La reacción en el apoyo izquierdo viene dada por la ecuación (6.45): I M 0 µzds I M 0 µ 0 cos α yds I M 0 µ 0 ydx qfµ 0 L3 I I I 15 qL2 Ax = = = = = z µds 2 y µds 2 y 2 µds 8µ 0 f L 2 8f 15 Esta es la misma reacción que aparece en un arco triarticulado de la misma directriz, con carga uniforme. El diagrama de momentos flectores viene dado por la ecuación (6.46): q 4f qL2 M = M 0 − yAx = ( Lx − x 2 ) − 2 ( Lx − x 2 ) =0 2 L 8f No aparecen momentos flectores, al igual que ocurre en el arco triarticulado. En realidad esto es debido a que se ha considerado el arco rígido axialmente; si no se hace esta suposición sí que aparecen momentos flectores. Los esfuerzos axiales y cortantes (figura N q 6.25) valen: Q α qL qL2 N = qx sin α − sin α − cos α M 2 8f qL/2 qL2 qL Q = qx cos α + sin α − cos α 8f 2 qL2/8f Figura 6.25 Teniendo en cuenta la relación sin α dy 4 f = tgα = = ( L − 2 x) cos α dx L2 se obtiene que qL2 4 f qL Q = qx cos α + ( L − 2 x ) cos α − cos α = 0 8 f L2 2 Como era de esperar, el arco tampoco está sometido a esfuerzos cortantes, al ser éstos la derivada del momento flector. El comportamiento de este arco es por lo tanto similar al del
- 22. 226 Curso de análisis estructural arco de tres articulaciones. Los valores extremos de N se producen en los apoyos y en la clave, y valen qL qL2 qL 2 qL2 N x =0 = − sin α 0 − cos α 0 = − L + 16 f 2 Nx=L/2 = − 2 8f 8f 8f 6.9.2 Calcular los esfuerzos en el arco del ejercicio 6.9.1, pero cargado con una fuerza puntual P en su clave. Los momentos flectores en el caso 0 son: M 0 = Px / 2 0 x L/2 M 0 = P( L − x ) / 2 L/2 x L La reacción horizontal es ahora (ecuación (6.45)): IM 0 µzds I M 0 µ 0 cos α yds I M 0 µ 0 ydx 5 Pfµ 0 L2 I I I 48 75 PL Ax = = = = = z µds 2 y µds 2 y 2 µds 8µ 0 f 2 L 384 f 15 0.0253 PL P El diagrama de flectores es (ecuación (6.46)): M= Px 75PL − 2 384 f y= P 75 x 2 96 L − 27 x M 0.0547 PL Figura 6.26 El momento máximo está en: dM 9L =0 → x= M max = M9 L / 50 = −0.0253 PL dx 50 El momento máximo positivo aparece en la clave, bajo la carga, y vale M L/ 2 = 0.0547 PL 6.9.3 Sea un arco biarticulado simétrico (figura 6.27), con directriz parabólica definida por su base L y su flecha f. Se supone que el arco es rígido axialmente (γ=0) y con sección variable, tal que su flexibilidad a flexión varía según la ley µ=µ0 cosα, siendo µ0 la flexibilidad en la clave. El tirante tiene flexibilidad ρ y una pretensión inicial de valor N0t. Calcular el esfuerzo en el tirante, el diagrama de flectores y la deformación del apoyo A.
- 23. Arcos 227 q µ=µ 0cosα y µ0 A ρt N0t B x Figura 6.27 4f La ecuación de la directriz es y= ( Lx − x 2 ) L2 q El diagrama de flectores del caso isostático es: M0 = ( Lx − x 2 ) 2 El valor de la tensión en el tirante viene dado por la ecuación (6.61). Sustituyendo en ella los valores anteriores se obtiene: qfµ 0 L3 + N0t 15ρ t X= 8µ 0 f 2 L +1 15ρ t Esta tensión es positiva para valores positivos de la carga exterior q (hacia abajo) y de la pretensión N0t. El diagrama de flectores es: q − X 4 f ( Lx − x ) M= 2 L 2 2 Se observa que el momento flector isostático, es decir el momento flector en ausencia del tirante, se ve disminuido por la influencia de la tensión X en el tirante. El momento flector con tirante es por lo tanto inferior al momento flector sin tirante. Además, la existencia de una pretensión en el tirante hace aumentar más su esfuerzo final X, y por lo tanto disminuye aún más el momento flector con respecto a la situación sin tirante. La existencia de un tirante pretensado hace por lo tanto disminuir el momento flector. La deformación horizontal del extremo A se obtiene calculando el alargamiento del tirante. La ecuación de equilibrio de éste es la de un muelle con esfuerzo de pretensión inicial: N t = ρ t−1 ∆ t + N 0 t Despejando la deformación y sustituyendo el valor del esfuerzo en el tirante Nt=X, se obtiene: q f µ 0 L3 1 − D ∆t = + ρ t N0t 15 D D siendo D el denominador de la expresión del esfuerzo en el tirante. En esta expresión de la deformación el primer sumando corresponde al efecto de la carga vertical y el segundo a la pretensión en el tirante. Este último sumando es siempre negativo para un valor positivo de la pretensión, pues D es positivo y mayor que 1. Por lo tanto la pretensión del tirante siempre hace disminuir la deformación del apoyo A.
- 24. 228 Curso de análisis estructural 6.9.4 Calcular la posición del centro elástico de un arco biempotrado simétrico, de directriz parabólica, con 60 m de luz y 15 m de flecha. La sección transversal es rectangular, de 1 m de ancho y canto h variable entre 2 m en la clave y 2.60 m en los apoyos, según la ley h=2+0.02 |x| (m). El material tiene E=3 1010 N/m2. Despreciar la energía de esfuerzo axial. Se adoptan unos ejes situados en la clave del arco (figura 6.28). La ecuación de su directriz referida a ellos es: y = − x 2 / 60 y x E 15 m 60 m Figura 6.28 Las integrales que definen las propiedades del arco se calculan numéricamente. Para ello se sitúan sobre el arco 21 puntos, separados 3 m según el eje X (figura 6.29). Todas las propiedades del arco, que son variables, se supone que lo hacen de forma discreta, adoptando solamente los valores que tienen en los 21 puntos en que se ha dividido el arco. Según esto los puntos 2 a 20 concentran las propiedades del arco correspondientes a 3 m de longitud horizontal, mientras que los puntos 1 y 21 concentran las propiedades correspondientes a 1.5 m de longitud horizontal. y 9 10 12 13 x 8 14 7 15 6 5 11 16 17 4 18 3 19 2 20 1 21 10 x 3 m 10 x 3 m Figura 6.29 A cada punto se le asocia un valor del diferencial de longitud del arco ds, calculado mediante : dy 2 4x2 ds = dx 2 + dy 2 = 1 + dx dx = 1 + 60 2 dx por lo tanto: x2 ∆s = 1 + ∆x 900 donde ∆x=3 m en los puntos 2 a 20, y ∆x=1.5 m en los puntos 1 y 21. La tabla 6.1 muestra los valores correspondientes a cada punto.
- 25. Arcos 229 Como comprobación de la validez de esta aproximación, se calcula la longitud del arco mediante: I s = ds ≈ ∑ ∆s = 68.903 m El valor exacto de la longitud, calculado analíticamente, es 68.868 m, por lo que la aproximación efectuada puede darse por buena. El procedimiento empleado para calcular numéricamente las integrales corresponde al empleo de la regla trapecial a los 20 segmentos en los que se ha dividido el arco. Al ser el arco simétrico, el centro elástico E está en su eje de simetría. Su coordenada y E se calcula mediante la expresión (6.74): Iyµds ∑ y∆s / EI yE = I µds ≈ ∑ ∆s / EI La tabla 6.1 muestra los distintos valores necesarios para aplicar la ecuación anterior. Punto x y ∆x ∆s Canto EI ∆s / EI y ∆s / EI (x1010) (x 10-10) (x10-10) 1 -30 -15.00 1.5 2.121 2.60 4.394 0.48278 -7.2416 2 -27 -12.15 3.0 4.036 2.54 4.097 0.98519 -11.970 3 -24 -9.60 3.0 3.842 2.48 3.813 1.0075 -9.6721 4 -21 -7.35 3.0 3.662 2.42 3.543 1.0335 -7.5965 5 -18 -5.40 3.0 3.499 2.36 3.286 1.0647 -5.7492 6 -15 -3.75 3.0 3.354 2.30 3.042 1.1027 -4.1351 7 -12 -2.40 3.0 3.231 2.24 2.809 1.1499 -2.7598 8 -9 -1.35 3.0 3.132 2.18 2.590 1.2093 -1.6325 9 -6 -0.60 3.0 3.059 2.12 2.382 1.2844 -0.77062 10 -3 -0.15 3.0 3.015 2.06 2.185 1.3796 -0.20693 11 0 0.00 3.0 3.000 2.00 2.000 1.5000 0.0000 12 3 -0.15 3.0 3.015 2.06 2.185 1.3796 -0.20693 13 6 -0.60 3.0 3.059 2.12 2.382 1.2844 -0.77062 14 9 -1.35 3.0 3.132 2.18 2.590 1.2093 -1.6325 15 12 -2.40 3.0 3.231 2.24 2.809 1.1499 -2.7598 16 15 -3.75 3.0 3.354 2.30 3.042 1.1027 -4.1351 17 18 -5.40 3.0 3.499 2.36 3.286 1.0647 -5.7492 18 21 -7.35 3.0 3.662 2.42 3.543 1.0335 -7.5965 19 24 -9.60 3.0 3.842 2.48 3.813 1.0075 -9.6721 20 27 -12.15 3.0 4.036 2.54 4.097 0.98519 -11.970 21 30 -15.00 1.5 2.121 2.60 4.394 0.48278 -7.2416 Σ 2.2899 10-9 -1.0347 10-8 Tabla 6.1 La posición del centro elástico es: yE ≈ ∑ y∆s / EI = −1.0347 ⋅10 −8 = −4.518 m ∑ ∆s / EI 2.289 ⋅10 −9
- 26. 230 Curso de análisis estructural 6.9.5 Calcular las características de la sección equivalente del arco del ejercicio 6.9.4 respecto de su centro elástico. La posición del centro elástico se calculó en el ejercicio 6.9.4, y está situado en el eje de simetría del arco, a 4.518 m bajo la clave. Se define un nuevo sistema de ejes ξ,η, que está situado en el centro elástico, y es paralelo al original. La relación entre las coordenadas en ambos sistemas (figura 6.30) es: ξ=x η = y + 4.518 y x η ξ E Figura 6.30 Las coordenadas de los puntos de definición del arco respecto a este sistema de ejes se indican en la tabla 6.2. Punto x=ξ y η x2 ∆s / EI (x 10-8) η2 ∆s / EI (x 10-9) 1 -30 -15.00 -10.48 4.3450 5.3039 2 -27 -12.15 -7.63 7.1820 5.7377 3 -24 -9.60 -5.08 5.8032 2.6015 4 -21 -7.35 -2.83 4.5579 0.82863 5 -18 -5.40 -0.88 3.4495 0.08273 6 -15 -3.75 0.77 2.4810 0.06512 7 -12 -2.40 2.12 1.6559 0.51608 8 -9 -1.35 3.17 0.9795 1.2140 9 -6 -0.60 3.92 0.4624 1.9721 10 -3 -0.15 4.37 0.1242 2.6327 11 0 0.00 4.52 0.0000 3.0625 12 3 -0.15 4.37 0.1242 2.6327 13 6 -0.60 3.92 0.4624 1.9721 14 9 -1.35 3.17 0.9795 1.2140 15 12 -2.40 2.12 1.6559 0.51608 16 15 -3.75 0.77 2.4810 0.06512 17 18 -5.40 -0.88 3.4495 0.08273 18 21 -7.35 -2.83 4.5579 0.82863 19 24 -9.60 -5.08 5.8032 2.6015 20 27 -12.15 -7.63 7.1820 5.7377 21 30 -15.00 -10.48 4.3450 5.3039 Σ 6.2081 10-7 4.4972 10-8 Tabla 6.2 Las características de la sección equivalente respecto al centro elástico son:
- 27. Arcos 231 • Momento de orden 0. Su valor se calculó en el ejercicio 6.9.4 al determinar la posición del centro elástico: I I00 = µds ≈ ∑ ∆s / EI = 2.289 ⋅10 −9 • Momentos de orden 2. Se calculan de forma numérica (ecuación (6.83)): e I I20 = ξ 2 µds ≈ ∑ x 2 ∆s / EI I I02 = η 2 µds ≈ ∑ η 2 ∆s / EI e Los valores necesarios para efectuar la integración numérica se indican asimismo en la tabla 6.2. Los valores que se obtienen son: I 20 = 6.2081 ⋅10 −7 e I 02 = 4.4972 ⋅10 −8 e 6.9.6 Calcular los esfuerzos en el arco del ejercicio 6.9.4 bajo la acción de una carga puntual de 1000 kN aplicada a 10 m a la izquierda de la clave. Determinar la deformación vertical en el punto de aplicación de la carga. Se adoptan como fuerzas hiperestáticas las reacciones en el centro elástico, cuya posición se calculó en el ejercicio 6.9.4. Los valores de estas fuerzas hiperestáticas se obtienen como solución de las ecuaciones (6.81). Al no haber temperaturas el término independiente de dichas ecuaciones se simplifica mucho y su solución resulta ser: Eξ = I M 0ηµds e I02 ≈ ∑ M 0η∆s / EI e I02 Eη = I − M 0ξµds e I20 ≈ − ∑ M 0 x∆s / EI e I20 ME = I M 0 µds I00 ≈ ∑ M 0 ∆s / EI I00 Los momentos flectores en el caso isostático M0 se muestran en la figura 6.31 y sus valores numéricos se indican en la tabla 6.3. 10 m P=1000 kN C E A B M 0=-P(x+10) Figura 6.31 Los distintos valores requeridos para calcular las integrales de forma numérica se indican en la tabla 6.3. Las incógnitas hiperestáticas resultan:
- 28. 232 Curso de análisis estructural Eξ ≈ ∑ M 0η∆s / EI = 0.0331284 = 736650 N e I02 4.4972 ⋅ 10 −8 − ∑ M 0 x∆s / EI 0.462538 Eη ≈ = = 745052 N e I20 6.2081 ⋅10 −7 ME ≈ ∑ M 0 ∆s / EI = −0.02972 = −12.98 ⋅10 6 N⋅m I00 2.2899 ⋅ 10 −9 El momento flector vale: M = M 0 − Eξη + Eη x − M E Sus valores se indican en la última columna de la tabla 6.3. Punto M0 M0 ∆s / EI M0 x ∆s / EI M0 η ∆s / EI M (x 106) (x106) (x10-3) (x10-3) (x10-3) (m-N) 1 0. 0. 0. 0. -1.6517 2 0. 0. 0. 0. -1.5160 3 0. 0. 0. 0. -1.1593 4 0. 0. 0. 0. -0.5816 5 0. 0. 0. 0. 0.2171 6 0. 0. 0. 0. 1.2368 7 0. 0. 0. 0. 2.4774 8 -1. -0.1209 1.08835 -0.38315 2.9391 9 -4. -0.5137 3.08249 -2.01312 1.6218 10 -7. -0.9657 2.89707 -4.21862 0.5255 11 -10. -1.5000 0.00000 -6.77774 -0.3499 12 -13. -1.7934 -5.38028 -7.83457 -1.0042 13 -16. -2.0550 -12.3299 -8.05248 -1.4376 14 -19. -2.2976 -20.6786 -7.28000 -1.6499 15 -22. -2.5298 -30.3578 -5.3594 -1.6413 16 -25. -2.7567 -41.3508 -2.11852 -1.4117 17 -28. -2.9811 -53.6593 2.62783 -0.9610 18 -31. -3.2039 -67.2836 9.07209 -0.2894 19 -34. -3.4255 -82.2126 17.4068 0.6032 20 -37. -3.6452 -98.4203 27.8183 1.7168 21 -40. -1.9311 -57.9332 20.2409 3.0514 Σ -0.02972 -0.462538 0.0331284 Tabla 6.3 La figura 6.32 muestra el diagrama de momentos flectores del arco.
- 29. Arcos 233 M (MN-m) 2.94 3.05 -1.65 -1.65 Figura 6.32 La deformación en el punto C de aplicación de la carga se calcula mediante la expresión: I ∆ CY = MM 0V µds ≈ ∑ MM 0 V ∆s / EI Pero en este caso M 0 V = M 0 / P pues los casos isostático virtual e isostático original (figura 6.31) son iguales, salvo en el valor de la carga aplicada. Por lo tanto la deformación es: M 0 V M 0 V ∆s ∆ CY ≈ ∑ = 1.045 ⋅10 −3 m P EI 6.9.7 Calcular los esfuerzos en el arco del ejercicio 6.9.4, bajo la acción de una carga distribuida de valor 100 kN/m. Se adoptan como fuerzas hiperestáticas las reacciones en el centro elástico, cuya posición se calculó en el ejercicio 6.9.4. Los valores de estas fuerzas hiperestáticas se obtienen como solución de las ecuaciones (6.81), considerando que no hay cargas térmicas: Eξ = I M 0ηµds e I02 ≈ ∑ M 0η∆s / EI e I02 Eη = I − M 0ξµds e I20 ≈ − ∑ M 0 x∆s / EI e I20 ME = I M 0 µds I00 ≈ ∑ M 0 ∆s / EI I00 El momento flector en el caso isostático es: M 0 = − q x + 30 0 5 2 /2 Sus valores se indican en la tabla 6.4 y se muestran gráficamente en la figura 6.33. q -180 MN-m M0 Figura 6.33