Maquina eléctricas
•Descargar como DOCX, PDF•
0 recomendaciones•2,644 vistas

Máquinas eléctricas

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Maquina eléctricas
Similar a Maquina eléctricas (20)
Último
Último (20)
Maquina eléctricas
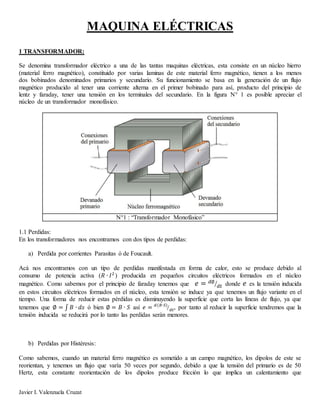
- 1. Javier I. Valenzuela Cruzat MAQUINA ELÉCTRICAS 1 TRANSFORMADOR: Se denomina transformador eléctrico a una de las tantas maquinas eléctricas, esta consiste en un núcleo hierro (material ferro magnético), constituido por varias laminas de este material ferro magnético, tienen a los menos dos bobinados denominados primarios y secundario. Su funcionamiento se basa en la generación de un flujo magnético producido al tener una corriente alterna en el primer bobinado para así, producto del principio de lentz y faraday, tener una tensión en los terminales del secundario. En la figura N° 1 es posible apreciar el núcleo de un transformador monofásico. N°1 : “Transformador Monofásico” 1.1 Perdidas: En los transformadores nos encontramos con dos tipos de perdidas: a) Perdida por corrientes Parasitas ó de Foucault. Acá nos encontramos con un tipo de perdidas manifestada en forma de calor, esto se produce debido al consumo de potencia activa (푅 ∙ 퐼2 ) producida en pequeños circuitos eléctricos formados en el núcleo magnético. Como sabemos por el principio de faraday tenemos que 푒 = 푑∅ ⁄푑푡 donde 푒 es la tensión inducida en estos circuitos eléctricos formados en el núcleo, esta tensión se induce ya que tenemos un flujo variante en el tiempo. Una forma de reducir estas pérdidas es disminuyendo la superficie que corta las líneas de flujo, ya que tenemos que ∅ = ∫ 퐵 ∙ 푑푠 ó bien ∅ = 퐵 ∙ 푆 así 푒 = 푑 (퐵∙푆) ⁄ , por tanto al reducir la superficie tendremos que la 푑푡 tensión inducida se reducirá por lo tanto las perdidas serán menores. b) Perdidas por Histéresis: Como sabemos, cuando un material ferro magnético es sometido a un campo magnético, los dipolos de este se reorientan, y tenemos un flujo que varía 50 veces por segundo, debido a que la tensión del primario es de 50 Hertz, esta constante reorientación de los dipolos produce fricción lo que implica un calentamiento que
- 2. consume potencia activa, una forma de poder reducir este efecto es usando materiales magnéticos de alta calidad, es decir, con dipolos fácilmente orientables. 1.2 Circuito equivalente: Para poder determinar el circuito equivalente en un principio consideremos un circuito más básico como el presentado en la figura N° 2, en donde podemos apreciar los bobinados primarios y secundarios. Javier I. Valenzuela Cruzat Figura N° 2 : “Circuito equivalente de un transformador ideal” El circuito presentado en l figura anterior corresponde al circuito equivalente de un transformador ideal, en donde despreciamos las pérdidas de potencia activa y las perdidas de dispersión de flujo magnético. Como sabemos el transformador consta en un principio de dos bobinados, cada uno de ellos trae consigo perdidas en forma de calor, esto debido a que el conductor de cobre no es ideal, además tenemos que parte del flujo magnético se dispersa fuera del núcleo, esto ocurre tanto en el bobinado principal como en el secundario, a esto mencionado sumémosle las perdidas propias del transformador (Por Histéresis y corrientes parásitas) y la inductancia que genera el flujo magnético. Tomando en cuenta lo mencionado anteriormente podemos determinar un circuito equivalente como el presentado en la figura N° 3. Figura N°3 : “Circuito equivalente de un transformador real” En la figura anterior podemos identificar los siguientes parámetros: Xd: reactancia de dispersión. Rcu: Resistencia propia del bobinado. Rfe: Resistencia para representar las perdidas por histéresis y Foucault. Xu: reactancia de magnetización. Y los subíndices 1 y 2 hacen referencia a los bobinados primarios y secundarios respectivamente. Este circuito equivalente tiene un defecto, aún no es posible relacionar las variables (corriente y voltaje) del bobinado primario con las del secundario, es por eso que se introduce la razón de transformación de un transformador, que se determina en forma práctica de la siguiente manera 푎 ≈ 푉1 /푉2 , donde los subíndices hacen referencia al primario y secundario respectivamente. Luego para poder referir el circuito al primario o secundario consideramos lo siguiente: a) Referido al primario: Observando la figura N° 4, en donde tenemos el circuito equivalente referenciado a primario tenemos que: - 푎 = 푒1/푒2 - 푖2´ = 푖2 ∙ 푎
- 3. Con LVK tenemos que 푒2 = (푅푐푢2 + 푗푋푑2) ∙ 푖2 + 푉2 , luego considerando los puntos anteriores tenemos que 푒1 = (푅푐푢2 + 푗푋푑2) ∙ 푖2´ ∙ 푎2 + 푉2 ∙ 푎, es así como definimos: 푉2 ´ = 푎 ∙ 푉2 ; 푖2´ = Javier I. Valenzuela Cruzat 푖2 푎 ; 푅푐푢2′ = 푅푐푢2 ∙ 푎2 푦 푋푑2′ = 푋푑2 ∙ 푎2 Figura N°4 : “Circuito equivalente referido a primario” b) Referido a secundario: De forma análoga es posible determinar el circuito equivalente referido a secundario que se presenta en la figura N° 5. Figura N°5: “Circuito equivalente referido a secundario” Donde podemos identificar que 푉1 ´ = 푉1 푎 ; 푖1´ = 푖1 ∙ 푎 ; 푅푐푢1′ = 푅푐푢1 푎2 ; 푋푑1′ = 푋푑1 푎2 ; 푅푓푒′ = 푅푓푒 푎2 푦 푋푢′ = 푋푢 푎2 1.3 Ensayos en transformadores En la práctica los únicos datos que tenemos que los transformadores son los que se encuentran en su placa característica, en ella podemos encontrar la potencia aparente, tensión del primario y secundario y si se trata de transformadores trifásicos tendremos el tipo de conexión. Para poder estimar los parámetros del circuito equivalente, es necesario realizar las siguientes pruebas: 1.3.1 Ensayo Cortocircuito: Este ensayo consiste en cortocircuitar la bobina del lado de baja tensión (ya que por este circula más corriente) y aplicar una tensión reducida en el lado de alta tensión, esta tensión se irá aumentando hasta que la corriente circulante alcance el valor nominal, es decir, la corriente nominal del lado de alta tensión. Luego se mide potencia activa, corriente circulante y tensión aplicada. Esta prueba en la figura N°5
- 4. Javier I. Valenzuela Cruzat Figura N° 5 : “Prueba de corto-circuito” Al realizar la prueba tendremos entonces los siguiente valores: 푉푠푐 , 퐼푠푐 y 푃푠푐 . Con estos podemos determinar la 푉impedancia de corto-circuito 푍푠푐 = 푠푐 ⁄ , también podemos determinar la resistencia de corto-circuito como 퐼푠푐 푅푠푐 = 푃푠푐 /퐼푠푐 2, con estos datos tenemos que 푋푠푐 = √푍푠푐 2 + 푅푠푐 2 , luego tenemos que 푅푠푐 = 푅푐푢1 + 푅푐푢2′ y también 푋푠푐 = 푋푑1 + 푋푑2′, y supondremos que 푅푐푢1 ≈ 푅푐푢2′ y 푋푑1 ≈ 푋푑2′ así tenemos que 푅푐푢1 = 푅푐푢2′ = 푅푠푐 2 de igual forma tenemos que 푋푑1 = 푋푑2′ = 푋푠푐 2 . Notar que los datos del secundario se encuentran referencia al primario. 1.3.2 Ensayo al vacío: Este ensayo consiste en dejar el lado de alta tensión al vacío, es decir, sin carga, para luego aplicar una tensión nominal en el lado de baja tensión. El esquema circuital de este ensayo es el presentado en la figura N° 6. Figura N° 6 : “Ensayo al vacío” De forma análoga a lo propuesto para el caso del ensayo de corto-circuito tendremos valores de potencia, corriente y tensión de circuito abierto. Definidos como 푍표푐 = 푉표푐 ⁄ , 푅표푐 = 푃표푐 /퐼표푐 퐼표푐 2 y 푋표푐 = √푍표푐 2 + 푅표푐 2 . Luego suponemos que 푅′ + 푅푐푢2 = 푅표푐 y 푋′ + 푋푑2 = 푋표푐. Donde 푅푐푢2 y 푋푑2 fueron determinadas en la prueba de corto-circuito. Nuevamente es necesario notar que los parámetros 푅′ y 푋′, están referidos al secundario, ahora con esto podemos determinar la reactancia de magnetización y la resistencia que representa las perdidas en el hierro. Así: 푅푓푒′ = 푅′+푋′ 푅′ y 푋푢′ = 푅′+푋′ 푋′ . 1.3.3 Determinación de polaridad
- 5. Otra prueba fundamental cuando se trata de transformadores monofásicos, sobre todo cuando se trata de transformadores que tienen más de dos terminales por bobina, esto para que las tensiones que se induzcan sean aditivas ó sustractivas según sea la aplicación del transformador. 1.3.3.1 Método de la pila Este método consiste en alimentar el primario del transformador con una batería y tomar lectura de la tensión que se induce en los terminales del secundario, luego si el instrumento marca una tensión negativa entonces tiene polaridad sustractiva y si marca una tensión positiva entonces tiene una polaridad aditiva. En la figura N° 7 se presenta un esquema con las diferentes polaridades. Figura N° 7 : “Polaridad aditiva y sustractiva de un transformador” Es necesario notar que la lectura del instrumento se realiza en el momento exacto que se energiza el bobinado primario, debido a que la tensión con la que trabajamos es continua no se producirá una tensión constante en los terminales del secundario, es más solo tendremos tensión en el momento en que se energiza el primario, para poder realizar esto es necesario incorporar un interruptor en el bobinado primario para así poder energizar la bobina en el momento que se desee. 1.3.3.2 Método del autotransformador Este método consiste en alimentar el primario con una tensión alterna, luego tendremos 3 voltímetros dos para cada uno de los terminales del transformador y un tercero que estará conectado entre los terminales de la bobina, además es necesario hacer un puente entre los otros dos terminales restantes, en la figura N° 8 se muestra un esquema de cómo realizar la conexión. Figura N° 8 : “Esquema circuital del Método del autotransformador” Una vez tomada la lectura de los voltímetros tenemos los siguientes casos: a) V3=V1+V2 entonces tenemos polaridad aditiva. b) V3=V1-V2 entonces tenemos polaridad sustractiva. Javier I. Valenzuela Cruzat
- 6. 1.4 Sistema en por unidad. Como hemos visto, para poder desarrollar un circuito que contiene un transformador los cálculos se vuelven tediosos ya que es necesario referir los parámetros al lado de alto ó baja tensión según sea la necesidad. Existe de forma alternativa y muy utilizada un método de cálculo denominado en por unidad (u.p) de medida. Este método consiste en considerar valores bases para el caso de los transformadores los valores bases que consideraremos serán la potencia aparente y las tensiones nominales del primario y secundario. La idea es tener un valor base para cada variable, es decir, necesitamos valores bases para la impedancia, tensión y corriente. Así tenemos que: 푆푏푝 = 푆푏푠 tenemos también 푉푏1 푦 푉푏2 con estos valores bases determinamos los valores base para las corrientes así 퐼푏1 = 푆푏푝 /푉푏1 y 퐼푏2 = 푆푏푠/푉푏2 una vez obtenidos los valores de corriente base es posible determinar los valores de impedancia base así 푍푏1 = 푉푏1/퐼푏1 y 푍푏2 = 푉푏2/퐼푏2, una vez ya determinados todos los valores bases podemos determinar los parámetros en por unidad así tenemos que: 푉1 (0 ⁄1) = 푉1/푉푏1, 푉2(0 Javier I. Valenzuela Cruzat ⁄1) = 푉2/푉푏2, 푅푐푢1(0 ⁄1) = 푅푐푢1/푍푏1 , 푅푐푢2(0 ⁄1) = 푅푐푢2/푍푏2 푋푑1(0 ⁄1) = 푋푑1/푍푏1 , 푋푑2(0 ⁄1) = 푋푑2/푍푏2 , 푋푢(0 ⁄1) = 푋푢/푍푏1 푅푓푒(0 ⁄1) = 푅푓푒/푍푏1 1.5 Aspectos teóricos 2 TRANSFORMADOR TRIFÁSICO En la mayoría de los sistemas de generación, transmisión y distribución utilizamos sistemas trifásicos con corriente alterna, es por esto que es primordial comprender el comportamiento de los transformadores trifásicos. Un transformador trifásico se puede montar de dos formas, con tres transformadores monofásicos en un banco trifásico ó bien construir un transformador trifásico en donde tendremos tres devanados dispuestos en un solo núcleo. 2.1 Conexiones de transformadores trifásicos. Básicamente tenemos 4 tipos de conexiones elementales, como sabemos en circuitos trifásicos existen la conexión Y (Ye-Estrella) y Δ-D (Delta-Triangulo), combinando ambas tenemos las siguientes conexiones para transformadores trifásicos: i) Y-Y ii) Y-D iii) D-D iv) D-Y Por lo general encontraremos que la nomenclatura para poder representar el tipo de conexión que tenemos es la siguiente: 푀푚푖 donde M: Conexión del devanado primario. m: Conexión del devanado secundario. i: Índice de desfase de las tensiones de alta y baja, donde 푖 = ∅ 30° , y ∅ es el ángulo de atraso de tensión de línea inducida en el secundario respecto a la tensión de línea inducida en el lado de alta tensión. 2.1.1 Conexión Y-Y La relación de transformación está dada por la siguiente relación 푉퐹1 푉퐹2 = 푎 y 푉퐿1 푉퐿2 = 푎
- 7. Esta conexión tiene dos graves problemas: - Si las cargas del circuito del transformador están desbalanceas, los voltajes de las fases del transformador pueden llegar a desbalancearse severamente. - Los voltajes de tercera armónica pueden ser grandes. Las corrientes o voltajes que son múltiplos de la 3° armónica provocan problemas en las maquinas eléctricas, en el caso de transformadores los voltajes de 3° armónica provocan NI XUXA IDEA. Estos problemas se pueden solucionar implementando unas de estas dos técnicas: - Poniendo sólidamente a tierra los neutros de los transformadores, en especial el neutro de los devanados primarios. Esta conexión permite que las componente aditivas de tercer armónico provoquen un flujo de corriente a través del neutro en lugar de ocasionar sobre voltajes. El neutro provee también un camino de retorno para los desbalances de corriente en la carga. - Adicionar un tercer devanado denominado terciario, conectado en Δ, al banco de transformadores. Si se adiciona un tercer devanado conectado en Δ, las componentes de tercer armónico del voltaje se sumarán en la Δ causando una corriente circulante dentro de este devanado. Esto suprime las componentes de tercer armónico del voltaje, de la misma forma que poniendo a tierra los neutros de los transformadores. Este devanado terciario en conexión Δ debe ser capaz de soportar las corrientes circulantes, por esto se construyen generalmente de un tercio de la potencia nominal de los devanados principales. En la práctica estos tipos de transformadores son muy poco utilizados, ya que un transformador con otro tipo de conexión corrige los problemas comentados anteriormente. 2.1.2 Conexión Y-D 푉퐹 1 푉퐹 2 = 푎 ó bien 푉퐿1 푉퐿2 = √3∙푉퐹1 푉퐹 2 Javier I. Valenzuela Cruzat = √3 ∙ 푎. La conexión Y-D no tiene problemas de tercera armónica en sus voltajes ya que son consumidas en una corriente circulante en el devanado Delta. Esta conexión es también más estable cuando hay cargas desbalanceadas ya que la conexión Delta redistribuye cualquier desbalance que exista. El problema que tiene este tipo de conexión, es que las tensiones del primario y secundario se encuentran desfasadas, en particular cuando tenemos secuencia a-b-c el secundario esta retrasado en 30° y cuando la secuencia es a-c-b la tensión del primario estará en retraso de 30°. Esto es un problema cuando se instalan transformadores en paralelo ya que los ángulos de fase de las tensiones del secundario deben ser las mismas. 2.1.3 Conexión D-Y 푉퐹 1 푉퐹 2 = 푎 ó bien 푉퐿1 푉퐿2 = 푉퐹 1 √3∙푉퐹2 = 푎 √3 . Tiene las mismas características que la conexión Y-D. 2.1.4 Conexión D-D 푉퐹 1 푉퐹 2 = 푉퐿1 푉퐿2 = 푎 este tipo de conexión no presenta problemas de contaminación con terceras armónicas ni tampoco desfases entre las tensiones del primario y secundario. 2.2 Transformación trifásica utilizando dos transformadores. Además de las conexiones trifásicas convencionales es posible implementar conexiones trifásicas con dos transformadores esta técnica involucra una reducción en la capacidad de potencia de los transformadores. Algunas de las conexiones más importantes con dos transformadores son: 1.- Conexión Δ abierta ó (V-V). 2.- Conexión en Yabierta-Δabierta. 2.2.1 Conexión Δ abierta ó ( V – V ).
- 8. Si suponemos que en unos de los devanados existiera una falla entonces es necesario retirarlo para poder continuar con el transformador en operación. En la figura N° 9 se presenta el esquema del transformador con la fase ausente. Figura N° 9: “Conexión de un transformador en Δ abierta” Si realizamos una suma de las tensiones para poder determinar que valor tendrá la tensión 푉퐶 = −푉퐴 − 푉퐵 , así tenemos que 푉퐶 = 푉∠ − 120°. La tensión resultante es la misma que si estuviese la fase presente. Pero la potencia suministrada por el banco de transformadores no será la misma que suministraría si la fase faltante estuviese presente. Al tener la fase removida la corriente de línea será la misma que la de fase. Y tendremos que habrá un desfase de 30° entre las corrientes y las tensiones de cada transformador. Así tenemos que la potencia será: Javier I. Valenzuela Cruzat 푃 = 3 ∙ 푉퐿 ∙ 퐼퐿 ∙ cos (30°) 푃 = √3 2 ∙ 푉퐿 ∙ 퐼퐿 Por tanto la potencia total suministrada será de 푃 = √3 ∙ 푉퐿 ∙ 퐼퐿. Con esto podemos determinar la razón de potencia que podemos suministrar con esta configuración. 푃Δ푎푏푖푒푟푡푎 푃3∅ = √3 ∙ 푉퐿 ∙ 퐼퐿 3 ∙ 푉퐿 ∙ 퐼퐿 = 1 √3 = 0.577 Por lo tanto el transformador con la fase removida suministrara un 57.7% de la potencia que suministrará el transformador con todas las fases. 2.2.2 Conexión Y abierta - Δ abierta. La conexión Y abierta - Δ abierta es muy similar a la conexión delta abierta excepto que los voltajes primarios y se derivan de dos fases y el neutro. Este tipo de conexión se muestra en la figura N° 10. Se acostumbra servir a pequeños usuarios comerciales que requieren servicios trifásicos en áreas rurales donde las tres fases no estén disponibles. Con esta conexión se puede obtener servicio trifásico provisional hasta que la demanda haga necesaria la instalación de la tercera fase. Una gran desventaja de esta conexión es que una corriente de retorno muy grande debe fluir por el neutro del circuito primario.
- 9. Figura N° 10: Conexión Y abierta - Δ abierta 2.3 Valores nominales y problemas relacionados con los transformadores Los transformadores tienen 4 valores nominales que son Potencia Aparente, Tensión, Corriente y frecuencia. 2.3.1 Valores nominales de tensión El valor nominal es fijado como el valor máximo admisible sin que la aislación de los bobinados del transformador se pierda. Pero este no es el principal cuidado, sabemos que al aumentar la tensión aplicada (por consecuencia la corriente de magnetización) aumentará el flujo dentro del núcleo del transformador, pero llegará un punto en el cual se requerirá un aumento considerable de tensión para tener un aumento insignificativo del flujo circulante, esto produce corrientes de magnetización inaceptable, por lo tanto la tensión nominal será la tensión máxima que queda fijada por la corriente de magnetización máxima permitida. 2.3.2 Potencia Aparente nominal de un transformador En conjunto con la tensión nominal el valor de potencia aparente nominal fijará el valor de la corriente circulante por las bobinas del transformador. La corriente circulante es importante ya que las pérdidas 푅 ∙ 퐼2 depende cuadráticamente de la corriente que circule, estas pérdidas se manifiestan en forma de calor aumentando la temperatura de los bobinas y reduciendo la vida útil del transformador. El transformador puede tener más de un valor nominal de potencia aparente como es el caso cuando opera en condiciones normales ó bien cuando este está con ventilación forzada. Tenemos el caso que cuando la tensión aplicada al transformador disminuye la potencia de este deberá disminuir en la misma razón, si no se toma esta medida la corriente aumentará en forma considerable y las pérdidas de este también. 2.3.3 Corriente de irrupción Ó denominadas corrientes inrush, son un fenómeno transitorio que se presenta al momento de energizar el transformador. Esta corriente solo fluye desde la fuente hacia el transformador, es decir, no sale de él (hacia el secundario). Esta corriente depende principalmente de los siguientes factores: - Punto de la onda AC donde se cierra los contactos del interruptor que energiza al transformador. - Características magnéticas del núcleo. El valor de la corriente inrush depende del punto en la onda de AC donde cierra los contactos del interruptor. El máximo valor de la corriente inrush se presenta cuando el interruptor cierra sus contactos cuando la tensión de alimentación es cero y el nuevo flujo producido por la corriente de magnetización toma la misma dirección que el flujo remanente. La corriente inrush es pequeña cuando los flujos toman direcciones contrarias. Cuando se trata de transformadores trifásicos estas corriente inrush tienen diferentes valores en cada fase, ya que al Javier I. Valenzuela Cruzat
- 10. momento de cerrar el interruptor las ondas de voltaje tendrán diferentes valor pues estás están desfasadas en 120° eléctricos. Cuando se tiene corriente inrush demasiado elevadas hace difícil la elección de un buen equipo de protección, ya que estos deben operar rápidamente cuando existe sobre carga ó bien un cortocircuito, pero no cuando está presente esta corriente inrush. Esta corriente inrush tiene magnitudes muy elevadas y están en el orden de 10 a 50 veces la corriente nominal. 2.4 Ensayos en transformadores trifásicos. Al igual que en los transformadores monofásicos, para poder determinar un circuito equivalente por fase, se realizan los ensayos de circuito abierto y cortocircuito. 2.4.1 Ensayo de cortocircuito. Para realizar este ensayo primero debemos conectar primario y secundario en conexión estrella, luego se cortocircuitan los devanados de baja tensión y se aplica una tensión baja que irá en aumento hasta alcanzar una corriente nominal en circulación. Se tomará medida de la potencia consumida, la tensión aplicada y la corriente circulante. En la figura N° 11 se tiene un esquema de la prueba de cortocircuito. Figura N° 11: Esquema de Ensayo de cortocircuito. Luego Teniendo los valores de Potencia Activa, corriente circulante y tensión aplicada de cortocircuito, podemos determinar impedancia, resistencia y reactancia de cortocircuito. Javier I. Valenzuela Cruzat 푍푆퐶 = 푉푆퐶 √3∙퐼푆퐶 (Impedancia de cortocircuito) 푅푆퐶 = 푃푆퐶 3∙퐼푆퐶 2 (Resistencia de cortocircuito) 푋푆퐶 = √푍푆퐶 2 − 푅푆퐶 2 (Reactancia de cortocircuito) Donde todos estos parámetros determinados anteriormente están referidos al primario. Luego tenemos que: 푅퐶푈1 = 푅퐶푈2′ = 푅푆퐶 2
- 11. Javier I. Valenzuela Cruzat 푋푑1 = 푋푑2′ = 푋푆퐶 2 También es necesario notar que la potencia que consume el transformador cuando está en cortocircuito será las perdidas en el cobre de los bobinados, ya que en la prueba de cortocircuito tenemos que circula la corriente nominal. 2.4.2 Ensayo de circuito abierto En esta prueba se deja al vacio los terminales del lado de AT, y se aplica tensión nominal en el lado de BT. Para poder realizar esta prueba es necesario tener conexión delta en ambos bobinados del transformador. En la figura N° 12 se tiene un esquema de este ensayo. Figura N° 12: Ensayo de Circuito Abierto. Luego Teniendo los valores de Potencia Activa, corriente circulante y tensión aplicada de circuito abierto, podemos determinar impedancia, resistencia y reactancia de circuito abierto. 푍푂푃 = 푉푂 푃 퐼푂푃 (Impedancia de circuito abierto) 푅푂푃 = 푃푂푃 3∙퐼푂푃 2 (Resistencia de circuito abierto) 푋푂푃 = √푍푂푃 2 − 푅푂푃 2 (Reactancia de circuito abierto) Como la impedancia de la rama en serie del bobinado de baja tensión es pequeña en comparación con la impedancia de la rama shunt entonces consideramos que: ′ = 푅푓푒 푅푂푃 2 + 푋푂푃 2 푅푂푃 푋휇′ = 푅푂푃 2 + 푋푂푃 2 푋푂푃 Es necesario recalcar que la potencia medida en la prueba de circuito abierto corresponde a las perdidas del núcleo del transformador, esto porque tenemos tensión nominal en el lado de baja tensión y si despreciamos la resistencia se tiene que: 푃푓푒 = 푉푛표푚2 푅′ 푓푒
- 12. 2. MAQUINA DE CORRIENTE CONTINUA: Durante décadas los motores de corriente continua fueron muy utilizados debido a su flexibilidad para poder controlar su velocidad cumpliendo con variadas aplicaciones industriales, pero en la actualidad estos fueron desplazados gracias a la utilización de electrónica de potencia, que logra obtener un buen control en motores de inducción. En cuanto a los generadores estos eran los que llevaban la vanguardia en años cuando la utilización de corriente alterna era solo objeto de estudio. No obstante esta máquina tienes diversas aplicaciones especialmente como motor: - Amplios rangos de velocidades. - Características de Torque-velocidad variable, constante o bien una combinación ideadas por tramos. - Rápida aceleración, desaceleración y cambio de sentido de giro. - Posibilidad de frenado regenerativo. 2.1 Aspectos constructivos. Como sabemos los Máquinas rotatorias cuentan con una parte móvil y una estacionaria, donde la parte móvil recibe el nombre de rotor y la parte estacionaria es denominada estator. En el caso de las MCC tanto rotor como estator están bobinados (ó en algunos casos con imanes permanentes) donde un bobinado recibe el nombre de inductor, ya que es el que produce el flujo magnético, y la otra bobina tiene el nombre de inducido, ya que en ella se inducen corrientes y tensiones por el principio de Faraday y Lentz, tenemos entonces que en las MCC el rotor se denomina inducido y el estator inductor (aún cuando ambos bobinados son energizados). En la Figura 2.1 encontramos un esquema simplificado de una MCC. Javier I. Valenzuela Cruzat Figura N° 2.1 : “Esquema simplificado de una MCC” Podemos identificar la culata (1) que pertenece al circuito magnético del estator y además sirve de soporte para este, esta además cuenta con los soportes donde se apoyara la máquina (13). De la culata se desprenden los polos (2) donde se ubican los devanados inductores (8). La parte de los polos más próxima al rotor se denomina zapata polar (3) y es de forma curva para poder así reducir al máximo el entrehierro entre el rotor y estator. Para solucionar unos problemas técnicos (reacción de armadura) presentes en las MCC se incorporan polos auxiliares (4-5), cuyos bobinados se conectan en serie a los de excitación. El rotor está formado por el inducido (6) y colector de delgas ó conmutador (10). Este último es el encargado de transformar la corriente a.c en d.c producto de una rectificación mecánica. En generadores la extracción de la energía se realiza por medio de escobilla de grafito comúnmente denominadas carbones. Estos se encuentran ubicados por encima del colector. En la Figura 2.2 encontramos un esquema de las escobilla de grafito.
- 13. Javier I. Valenzuela Cruzat Figura N° 2.2 : ”Escobilla de grafito” 2.2. Principios de funcionamiento. En la Figura N° 2.3 se muestra un esquema simplificado de una MCC. Donde el rotor es representado por una espira única. Figura N° 2.3 : “Esquema representativo de MCC” La bobina inductora genera un flujo magnético constante e invariante en el tiempo. Para el caso de motores tenemos que la bobina inducida es recorrida por una corriente d.c. luego se induce una fuerza que mueve al rotor, y con acción del conmutador se cambia el sentido de la corriente para producir así un torque constante. Cuando la bobina del estator (bobina de campo) es alimentada con una corriente 퐼푓 y el rotor (armadura) es recorrido por una corriente 퐼푎, se producen FMM estacionarias indicadas en la Figura N° 2.4.
- 14. Javier I. Valenzuela Cruzat Figura N° 2.4 : “Distribución de las FMM en rotor y estator” En un momento dado la disposición del conjunto escobilla-colector será tal que los FMM inducidos estarán en cuadratura posición (a), por ende, tendremos que se generará un torque de excitación dado por 푖푎 푙 × 퐵. El rotor girará hasta la posición (b) en donde la bobina de armadura (rotor) se cortocircuita en esta condición no existe corriente por lo tanto no tendremos torque. Al seguir girando el sentido de la corriente se invierte generando nuevamente un torque, en el mismo sentido. Por ende por cada revolución mecánica la corriente cumple un ciclo. De esta forma tendremos que el Torque generadora será nulo dos veces por ciclo por ende solo se logra un Torque pulsante, pero en la practica el número de bobinas es mayor y su interconexión es tal que se asegurara tener los FMM en cuadratura. Figura N° 2.5 : “Formad de onda de corriente en armadura” Para poder caracterizar las MCC es necesario poder determinar analíticamente las expresiones para la tensión inducida en la armadura 퐸푎 y el torque generado 푇퐶 . A través de cálculos es posible encontrar las siguientes expresiones. 퐸푎 = 퐾푎 ∙ 휔푛 ∙ ∅ (2.2.1)
- 15. Javier I. Valenzuela Cruzat 푇퐶 = 퐾푎 ∙ 푖푎 ∙ ∅ (2.2.2) Donde 퐾푎 es una constante constructiva propia de cada MCC y se determina con la siguiente expresión: 퐾푎 = 푝 ∙ 퐶푎 ⁄2 ∙ 휋 ∙ 푚 (2.2.3) 퐶푎 : Número de conductores de la armadura. 푚: Número de trayectorias paralelas en el devanado de armadura vistas entre pares de escobillas de polaridad distintas. 푝: Número de polos. Por ende podemos determinar que el número de conductores a lo largo de cualquier trayectoria están dados por la ecuación (2.2.4). 푍 = 퐶푎 /푚 (2.2.4) Con esto podemos determinar expresiones para la potencia eléctrica y potencia mecánica, dadas por las expresiones siguientes: 푃푒푙푒푐 = 퐸푎 ∙ 푖푎 = 퐾푎 ∙ 휔푛 ∙ ∅ ∙ 푖푎 [W] (2.2.5) 푃푚푒푐 = 푇푚 ∙ 휔푚 = 퐾푎 ∙ ∅ ∙ 푖푎 ∙ 휔푚 [W] (2.2.6) Por lo tanto tenemos que 푃푒푙푒푐 = 푃푚푒푐 , esto es para el caso ideal, ya que en MCC reales tenemos que existen pérdidas por parte de la puerta eléctrica dadas por 푅 ∙ 푖 2 en las bobinas de campo y armadura, como también en el núcleo y pérdidas en la puerta mecánica producidas por roce y fricción. En MCC se dispone de una serie de conexiones distintas cada una de ellas con sus características que la definen y determina para qué tipo de aplicación son más adecuadas, en la Figura N° 2.5 se dispone de los 4 tipos de conexiones disponibles. Figura N° 2.5 : “Tipos de MCC”
- 16. Donde podemos encontrar (a) excitación independiente, (b) excitación en serie, (c) excitación en paralelo o en derivación y (c) excitación compuesta, además en la excitación compuesta tenemos la compuesta corta donde la rama shunt (bobina de campo en derivación o paralelo) está más cercana a la armadura y la compuesta larga donde la rama shunt (bobina de campo en derivación o paralelo) está más lejana a la armadura. Y también existen las del tipo acumulativas donde las FMM de las bobinas de campo en serie y paralelo se suman y diferencial donde las FMM se restan. Esto depende de la polaridad de las bobinas. En la Figura N° 2.6 es posible distinguir entre compuesta largas y cortas. Javier I. Valenzuela Cruzat Figura N° 2.6 : ”Tipos de MCC con excitación compuesta” 2.3 Reacción de Armadura Cuando tenemos a la MCC en vacío, por ejemplo para el caso de un generador esta no está conectada a una carga eléctrica, tenemos entonces que no existen corrientes en el inducido (rotor), pero si tensiones, por lo tanto el flujo magnético existente en la MCC será el producido únicamente por las bobinas inductoras. Luego al momento de conectar una carga al inducido se producirán corrientes y con ellas FMM asociadas a las bobinas del rotor, estas FMM hacen variar la forma y magnitud del flujo en el entrehierro respecto de los valores que tiene la maquina cuando trabaja en vacío. La reacción de armadura produce dos efectos, la reducción del flujo magnético circulante y desplazamiento de la línea neutra magnética, que produce arcos eléctricos en las pastillas de grafito, acortando la vida útil de estos. Para poder reducir estos efectos se dispone de las siguientes medidas: - Polos auxiliares: Estos se ubican entre los polos magnéticos y sus devanados son conectados en serie con los devanados de excitación. - Bobinas de compensación: se ubican en las caras polares y cuya polaridad esta en oposición a la del devanado de armadura. Estos devanados se conectan en serie con la armadura de forma que la FMM de ambas sea la misma y la distorsión del campo magnético sea la mínima. El problema más severo puede ser el debilitamiento del flujo magnético, en generadores el efecto de armadura produce una disminución de la tensión suministrada por el generador, en cambio en motores este efecto es más severo, la disminución del flujo produce un aumento de la velocidad de rotación de la máquina, como consecuencia de este debilitamiento del flujo algunos motores d.c en derivación pueden alcanzar velocidades no permitidas que pueden provocar una destrucción de la máquina.
- 17. 2.4 Características de Torque-velocidad. 2.4.1 Conexión independiente y shunt En ambas conexiones tenemos que al realizar LVK y utilizando la ecuación (2.2.1) es posible llegar a la misma expresión: Javier I. Valenzuela Cruzat 휔푛 = 푉푇 퐾푎 ∙∅ − 푅푎 (퐾푎 ∙∅)2 ∙ 푇 (2.4.1) De aquí es posible determina curvas Torque-velocidad y de qué forma realizamos el control de velocidad de este motor. Es posible controlas la velocidad de motores en conexión shunt con dos métodos comunes y otro no tan común. Dentro de los métodos comunes tenemos: - Ajustando (aumentado) la resistencia de campo y por ende el flujo de campo (esto a través de un reóstato). - Ajustando el voltaje en los terminales aplicados al inducido.+ Y el método menos común es variando la resistencia del inducido. Los motores en conexión serie son caracterizados por su alto Torque-Ampere, es más, esta máquina genera el torque más elevado que el resto de las máquinas d.c. 2.4.2 Conexión serie. Esta conexión tiene las siguientes características: - Par de arranque muy elevado. - Difícil control de velocidad. - Requiere reóstato de arranque. - Se utiliza para tracción eléctrica. Una precaución importante de esta configuración es la posibilidad de que el motor alcance velocidades riesgosas, esto ocurre cuando tenemos conectada una carga al motor y luego por algún acto accidental esta carga mecánica se desconecta (rompimiento de una correa transportadora) el torque aplicado por la máquina se reducirá lo que provocará en ese instante un aumento exagerado de la velocidad el motor. Si despreciamos las pérdidas producto del rose mecánica tenemos que la potencia mecánica de salida será la misma potencia de conversión entregada por el motor: 푃푚푒푐 = 푃푒푙푒푐 (2.4.2) 푇 ∙ 휔푚 = 퐸푎 ∙ 푖푎 (2.4.3) Luego como tenemos que torque se ve reducido y las características eléctricas se mantiene tenemos entonces un aumento de la velocidad del motor. 푇 ↑∙ 휔푚 ↓= 퐸푎 ∙ 푖푎 (2.4.4)
- 18. Para poder controlas la velocidad de este motor se variar la tensión de alimentación de este, lo que permite tener una variada gama de velocidades disponibles. Una forma alternativa de controlar la velocidad es incorporar un reóstato en el circuito en serie, aún cuando esta medida solo provoca un aumento en las pérdidas del cobre, esta se realiza en arranques de motores dc en conexión serie. 2.4.3 Conexión compuesta. Esta conexión tiene las siguientes características: - Par de arranque más elevado que el motor en derivación. - Muy estable. - Requiere de reóstato de arranque en el inducido. - Utilizado en maquinas de herramientas y tracción. En los motores en conexión compuesta tenemos que el flujo tiene dos componentes una dada por la rama en shunt y la otra por la rama en serie, tenemos que el flujo entregado por la rama en shunt será constante mientras que el flujo que entrega la rama en serie variada dependiendo de la carga mecánica que se le conecte al motor. Para poder controlar la velocidad de este motor se utilizan los mismos métodos mencionados para el caso de motores en conexión serie y derivación. La elección del más adecuado depende de los argumentos presentes. 2.5 Flujo de potencia y pérdidas en Maquinas d.c. Independiente si se trata de un motor o un generador tenemos que parte de la potencia de entrada no se utiliza ya que se absorbe en las pérdidas propias que tiene cada MCC. Las pérdidas en una MCC se pueden dividir en 5 categorías: - Pérdidas eléctricas o pérdidas en el cobre (푅 ∙ 퐼2). - Pérdidas en las escobillas. - Pérdidas en el núcleo. - Pérdidas mecánicas. 2.5.1 Pérdidas eléctricas. Existen perdidas del tipo eléctricas tanto en los bobinados de armadura como en los del estator. 2.5.2 Pérdidas en las escobillas. Estas se producen debido a la existencia de una caída de tensión en las escobillas, por ende estas consumen potencia activa. 2.5.3 Pérdidas en el núcleo. Estas son las pérdidas propias del núcleo, es decir, las pérdidas por histéresis y corriente parásitas. 2.5.4 Pérdidas mecánicas. Estas pérdidas se pueden dividir en dos: las pérdidas por rozamiento y fricción entre los rodamientos de la máquina y las pérdidas por rozamiento con el aire que se encuentra concentrado dentro de la máquina. Javier I. Valenzuela Cruzat
- 19. Javier I. Valenzuela Cruzat Figura N° 2.7 : “Diagrama de flujo de potencia” En la Figura N° 2.7 se puede observar un diagrama de flujo de potencia para una MCC utilizada como generador, se tiene que la potencia de entrada es potencia mecánica, luego se tienen las pérdidas misceláneas (pérdidas varias que no se clasifican en los grupos anteriores y corresponde al 1% a plena carga), las pérdidas mecánicas y las asociadas al núcleo. En estos momentos es cuando pasamos de la puerta mecánica a la eléctrica con la potencia de conversión dada por la siguiente expresión: 푃푐표푛푣 = 퐸푎 ∙ 푖푎 (2.5.1) Aunque esta no es la potencia que se tiene en los terminales de la MCC, luego se tienen las pérdidas eléctricas y posteriormente tendremos la potencia de salida que está determinada por: 푃표푢푡 = 푉푇 ∙ 푖퐿 (2.5.2) Sabemos que el rendimiento de una máquina se puede determinar a través del cuociente entre la potencia de entrada y la potencia de salida tal como lo indica la expresión (2.5.3). 휂 = 푃푖푛 푃표푢푡 ∙ 100% (2.5.3) Donde la potencia de salida se puede determinar restándole las pérdidas a la potencia de entrada o bien la potencia de entrada se puede determinar sumándoles las pérdidas a la potencia de salida. 2.6 Arranque de motores CC. Las técnicas de arranque de un motor de CC consiste, como en todo motor, en buscar un método para poder reducir la corriente de partida de la máquina, es de gran importancia considerar un método de arranque para motores de CC ya que estos consumen una elevada corriente en régimen nominal y como sabemos la corriente de partida de un motor bordea entre 5 a 8 veces la corriente nominal por ende se hace difícil darle partida directa a motor CC. En el caso de motor CC la reducción de corriente de partida se puede realizar de dos maneras, método de arranque con tensión reducida, método del aumento de resistencia de bobinados.
- 20. 2.6.1 Método de arranque de tensión reducida. Como vimos anteriormente al energizar un motor CC es de suma importancia preocuparse del bobinado de campo, en primera instancia es necesario energizar primero la bobina de campo hasta alcanzar su corriente nominal, esto para el caso de conexión independiente, shunt y compound, ya que en conexión serie se energizara armadura y campo al mismo tiempo. Una vez alcanzada la corriente nominal en la bobina de campo se procede a energizar la armadura y es ahora cuando se aplica el método de arranque con tensión reducid, ya que el alto consumo de corriente se produce en la corriente de armadura, por lo tanto una vez que hayamos vencido la inercia del motor aplicando una bajan tensión, se procederá a aumentar progresivamente la tensión hasta llegar a valores nominales, de esta manera se habrá disminuido considerablemente el aumento de la corriente en la partida. Este método se aplica solo para conexión de excitación independiente. Javier I. Valenzuela Cruzat Tensión Variable Interpolos Tensión Nominal If nominal Figura 2.6.1: “Arranque con tensión reducida en conexión de excitación independiente” 2.6.2 Método del aumento de resistencia en bobinas. Este método consiste en aumentar la resistencia del bobinado de armadura para así tener una corriente menor en la partida, la diferencia de este método con el anterior descrito, es que en este caso aplicados tensión nominal a la partida y la reducción de la corriente de partida se produce gracias al aumento de la resistencia del bobinado de partida, este método se aplica en conexión de excitación independiente, serie, compound y shunt. Interpolos Reóstato partida Rama shunt Sw1 Tensión nominal Figura 2.6.2: “Arranque con aumento de resistencia de bobinados en conexión shunt”
- 21. 3.- MÁQUINA SINCRÓNICA 3.1 INTRODUCCIÓN A LAS MÁQUINAS SINCRÓNICAS Una de las características principales que tienen las máquinas sincrónicas es que posee alimentación en DC y AC, el bobinado denominado inducido (por lo general armadura) se energiza con corriente alterna, en cambio el bobinado inductor (por lo general rotor) se energiza con corriente directa. Dentro de las máquinas sincrónicas encontramos las de tipo rotor cilíndrico y rotor con polos salientes. La alimentación DC del bobinado inductor se realiza a través de anillos deslizantes (ó anillos colectores). Un generador sincrónico suministrando potencia a una impedancia genera una tensión cuya frecuencia viene fijada por la velocidad según la ecuación 3-1. Javier I. Valenzuela Cruzat 푓푒 = 푃 120 ∙ 푛 (3-1) Donde 푛 será la velocidad con la cual gira el eje de la máquina y 푓푒: frecuencia eléctrica que alimenta el inducido. La corriente y el factor de potencia que entrega el motor dependerán de la excitación del generador y por las impedancias del mismo y de la carga aplicada. Cuando por el estator circulan corrientes balanceadas se crea un campo magnético rotatorio que gira a la velocidad de sincronismo que viene determinada por la ecuación 3-2. 푛 = 120 ∙ 푓푒 푃 (3-2) Mientras el campo magnético generado por la corriente continúa aplicada al rotor girará junto con este. Sabemos que para que exista un torque medio no nulo debe existir un ángulo de desfase entre el campo generado por bobinado inducido y por el bobinado inductor, como sabemos la velocidad del campo del inducido se denomina velocidad de sincronismo, por lo tanto para que el torque se mantenga constante el rotor deberá girar a la velocidad del sincronismo también, esta es otra de las característica principales del motor sincrónico, el eje del motor gira a la velocidad de sincronismo. Por si solo, un motor sincrónico no es capaz de girar, ya que no tiene torque de partida, solo tiene un torque pulsante, esto porque en un principio la velocidad del campo magnético del bobinado inducido es mayor a la velocidad del campo del bobinado inductor, por lo tanto no tendremos un ángulo de desfase constante entre los campos y no habrá torque medio, es por este motivo que el motor sincrónico requiere un motor impulsor, este solo se utiliza para llevar a la máquina sincrónica hasta su velocidad de sincronismo, luego se desconectará. Para poder determinar el torque que aplica el motor primero enfoquémonos en el diagrama siguiente en donde se presentan los campos generados por los bobinados inducidos e inductor presentado en la figura 3-1. Fe Fr Fer ar a e aer Figura 3.1: Diagrama de campos de MS En la figura 3-1 podemos identificar que Fe: Campo generado armadura, Fr: Campo generado por bobinado de campo. Luego tenemos que le torque generador por el motor sincrónico viene dado por la ecuación 3-3. 푇 = 휋 2 (푃 2 ) 2 ∅푒푟퐹푟 sin (훼푟 ) (3-3)
- 22. Las variaciones en el torque requerido por las distintas cargas mecánicas se manifiesta por la variación del ángulo 훼푟 en grados eléctricos, como se muestra en la curva ángulo-par de la figura 3-2. Javier I. Valenzuela Cruzat Figura 3.2: Curva característica Torque-Ángulo de par 훼푟 Cuando el motor gira en vacío el torque necesario es pequeñísimo, en régimen estacionario, este torque se utiliza para vencer el torque propio de las pérdidas de la máquina, por ende el ángulo de par será pequeño también, luego al añadirle carga al eje, el rotor se retrasará con respecto al campo giratorio del estator hasta que el ángulo de par llegue al valor necesario para tener el torque requerido para esta nueva carga. Este retraso del rotor producirá en unos instantes una disminución de la velocidad de giro, pero luego se alcanzará el sincronismo. Esta disminución de la velocidad es posible visualizar iluminando el eje del motor con una luz estroboscópica donde la frecuencia de destello sea tal que el eje aparezca inmóvil. Cuando 훼푟 sea 90° tendremos el torque máximo que generará el motor, en particular se denomina torque crítico, en esta condiciones la potencia mecánica que suministra el motor se denomina potencia crítica, ahora si la carga requiere más potencia la velocidad del motor se reducirá perdiendo así la condición de sincronismo, ya que la velocidad de giro del rotor no será la sincrónica. El valor de par crítico se puede aumentar, aumento la corriente de excitación (bobinado de campo) ó aumentando la tensión en los bornes. En disposición generador ocurren problemas también al superar el torque crítico, si la máquina motriz que mueve el rotor tiene un torque superior al torque crítico entonces se perderá la condición de sincronismo aumentando rápidamente la velocidad. 3.2 LAS MÁQUINA SINCRONICAS COMO IMPEDANCIAS Es posible determinar un circuito equivalente para una máquina sincrónica con rotor cilíndrico no saturado, para esto observemos la figura 3.3 en donde se encuentra un diagrama fasorial de las tensiones inducidas y por los flujos correspondientes, donde el subíndice f se refiere a bobina inductora, ar a la bobina de armadura y r al resultante.
- 23. Javier I. Valenzuela Cruzat Ia Ef Er Ear jar jr j f Figura 3.3: Diagrama fasorial de f.e.m inducidas por sus correspondientes flujos De la figura 3.3 podemos notar que las tensiones inducidas están con un desfase de 90° con respecto a las f.m.m que las inducen, luego es posible llegar a la expresión 3-4. 퐸푓 = 퐸 푟 + 푗푥휑 ∙ 퐼푎 (3-4) La tensión 퐸푓 es la inducida por el flujo producido por la bobina inductora. Tenemos además que la tensión 퐸 푟 difiere de la tensión 푉 푡 debido a la caída de tensión presente en la resistencia propia de la bobina de armadura 푅푎y en la inductancia de dispersión 푥푑. Por último el circuito equivalente de una máquina sincrónica no saturada es el que se presenta en la figura 3.4. Donde 푥푠 es conocida como reactancia sincrónica no saturada, que toma en consideración todos los flujos creados por las corrientes polifásicas equilibradas de la armadura mientras 퐸푓 toma en consideración los flujos creados por la corriente del inductor. Notar que este circuito es solo valido para máquinas sincrónicas con rotor cilíndrico trabajando a frecuencia constante. Figura 3.4: Circuitos equivalente para una máquina sincrónica de rotor cilíndrico no saturada
- 24. 3.3 CARACTERÍSTICAS DE CIRCUITO ABIERTO Y EN CORTOCIRCUITO Para determinar las constantes que caracterizan a una máquina sincrónica incluyendo los efectos de saturación, se emplean dos grupos básicos de curvas que estudiaremos a continuación. Este estudio puede aplicarse tanto a máquinas de rotor cilíndrico como a máquinas de polos salientes. 3.3.1 Característica en circuito abierto y pérdidas en vacío La característica de circuito abierto de una máquina sincrónica es una curva que expresa la tensión inducida en los bornes del inducido en circuito abierto (armadura desenergizada) en función del campo de excitación, cuando la máquina a velocidad de sincronismo. Por lo general esta curva se expresa en valores en por unidad en donde tomamos como base los valores nominales de tensión en los bornes de la armadura y corriente de campo respectivamente. Esencialmente esta curva representa la relación entre la componente fundamental del flujo en el entrehierro y la f.m.m en el circuito magnético cuando ésta procede únicamente del devanado inductor. Midiendo la potencia mecánica necesaria para mantener la velocidad sincrónica durante la prueba, se podrán conocer las pérdidas totales en vacío que comprenden las pérdidas por rozamiento y por resistencia del aire, así como las pérdidas en el núcleo correspondientes al flujo de la máquina sin carga. Las pérdidas mecánicas son constantes, mientras que las pérdidas en el núcleo son función del flujo que a su vez es proporcional a la tensión de bornes en vacío. La potencia necesario para mantener la velocidad sincrónica en vacío (sin tener corriente de campo) corresponderá a las pérdidas por roce y ventilación, al momento de excitar el campo se requerirá más potencia para poder mantener la velocidad sincrónica, luego al estar en corriente de campo nominal, obtenemos la potencia requerida para mantener la velocidad sincrónica y por una simple diferencia obtendremos la potencia de pérdidas en el núcleo a valores nominal de corriente de campo. Javier I. Valenzuela Cruzat Figura 3.3: Curva de característica de circuito abierto
- 25. Javier I. Valenzuela Cruzat Pérdidas en el hierro en vacío Tensión en vacío Figura 3.4: Curva de pérdidas en el hierro en vacío 3.3.2 Características de cortocircuito y pérdidas en carga. Si tenemos la máquina sincrónica girando a velocidad nominal, con los bobinados de armadura en cortocircuito, y mediante unos amperímetros tomamos lectura de la corriente que circula por los bobinados y aumento gradualmente la corriente de excitación en la bobina de campo hasta alcanzar su valor máximo, en la práctica es posible llegar hasta el doble de la corriente nominal, podremos obtener, a través de las lecturas obtenidas, la característica en cortocircuito de la máquina en ensayo, esta curva nos permite tener una relación entre la corriente de armadura en cortocircuito con la corriente de excitación del rotor. Figura 3.5: Esquema de característica de cortocircuito. Figura 3.6: Característica de cortocircuito.
- 26. Utilizando en conjunto la curva de cortocircuito y circuito abierto, es posible determinar la reactancia sincrónica de saturación y la de no saturación, primero para determinar la reactancia sincrónica no saturada, consideremos un combinación entre la curva de cortocircuito y circuito abierto como la que nos muestra la figura 3.4. Javier I. Valenzuela Cruzat Recta del entrehierro OCC SCC b a Tensión en vacío (ordenadas de OCC) Corriente en cortocircuito armadura O f O´ (Ordenadas de SCC) Corriente de excitación Figura 3.7: Combinación entre característica en circuito abierto y cortocircuito Para poder determinar entonces la reactancia sincrónica no satura es necesario tomar el cociente entre la recta Oa sobre la recta O´b, que básicamente corresponden a la tensión inducida en los bornes de una fase de los terminales de la armadura y dividirlos por la corriente de armadura circulante estando esta en cortocircuito polifásico. 푋푠 = 푂푎 푂´푏 (3-4) Ahora si tenemos los valores de tensión y corriente en p.u y por fase, tendremos que la unidad de la reactancia sincrónica no saturada será en Ω × 퐹퐴푆퐸. Ahora para poder determinar la reactancia sincrónica en saturación debemos trazar una curva que vaya desde el punto O hasta el punto situación en la curva de OCC, donde la tensión inducida en la armadura sea la nominal, tal como se presenta en la figura 3.5. Recta del entrehierro OCC SCC a Tensión en vacío (ordenadas de OCC) Corriente en cortocircuito armadura O f’ O´ (Ordenadas de SCC) Corriente de excitación c f’’ Tensión nominal Vt Corriente nominal Ia Figura 3.8: Combinación de característica en circuito abierto y cortocircuito para determinar reactancia sincrónica saturada.
- 27. Así tendremos que la reactancia sincrónica saturada se determina a través de la expresión 3-5. Javier I. Valenzuela Cruzat 푋푠−푠 = 푉푡 퐼푎′ (푠푐 ) (3-5) Donde 푉푡 corresponde la tensión nominal de armadura e 퐼푎′ (푠푐) corresponde a la corriente de armadura en cortocircuito, tomada de la característica en cortocircuito corresponde a la tensión nominal 푉푡 , es decir, corresponde a la recta O’c. Además se denomina realción de cortocircuito a la relación entre las corrientes de excitación necesarias para obtener la tensión nominal en circuito abierto y la corriente nominal en cortocircuito, tal como lo expresa la ecuación 3-6. 푅푒푙. 푐표푟푡표푐푖푟푐푢푖푡표 = 푂′푓′ 푂′푓′′ (3-6) Si pudiésemos medir la potencia necesaria para mantener el eje girando a velocidad sincrónica, tendríamos que esta potencia correspondería a las perdidas mecánicas, estimadas en el inciso de característica de circuito abierto, y las pérdidas en cortocircuito, que corresponden a las pérdidas debido a la corriente inducida en la armadura. Una vez obtenidas las pérdidas debido a la corriente inducida en la armadura es posible determinar la resistencia efectiva de los devanados de la armadura, esto es con el cociente entre las pérdidas de cortocircuito y la corriente de armadura al cuadrado, tal como indica la ecuación 3-7. 푅푎(푒푓) = 푃표푡푒푛푐푖푎 푑푒 푐표푟푡표푐푖푟푐푢푖푡표 (퐶표푟푟푖푒푛푡푒 푒푛 푐표푟푡표푐푖푟푐푢푖푡표) 2 (3-7) 3.5 CARACTERÍSTICAS EN REGIMEN PERMANENTE Las curvas más utilizadas en la práctica son aquellas que relacionan entre sí la tensión en los bornes de la armadura, la corriente de excitación, la corriente de armadura, el factor de potencia y el rendimiento. Supongamos que tenemos una carga eléctrica conectada a los terminales de la armadura de un generador sincrónico, supongamos que esta carga tiene factor de potencia constante, la curva que me relaciona la corriente de excitación necesaria para mantener la tensión nominal en los bornes de la armadura al variar la carga con un factor de potencia constante se denominada característica de regulación. En la figura 3.9 se presenta las curvas correspondiente para distintos factores de potencia. Cosj 0.8 atraso j Cos 1 j Cos 0.8 adelanto kVA de carga ó corriente de armadura Excitación necesaria para mantener Vt nominal Carga nominal Figura 3.9: Característica de regulación Ahora si mantenemos constante la corriente de excitación y variamos la carga eléctrica, que tendrá factor de potencia constante, tendremos una variación en la tensión de los bornes de la armadura. La curva que relación la
- 28. tensión en los bornes de la armadura con la corriente de armadura ó carga eléctrica se denomina característica de tensión. En la figura 3.10 se muestra características de tensión para distintos factores de potencia. Javier I. Valenzuela Cruzat 1.0 Corriente en armadura 1.0 Tensión en armadura fp 0.8 atraso fp 1 fp 0.8 adelanto Figura 3.10: Característica de tensión Ajustando la corriente de excitación de un motor sincrónico podemos regular el factor de potencia con el cual trabaja, y por consiguiente la corriente en la armadura. Es posible determinar curvas que relacionen la corriente de excitación con la corriente en el devanado de armadura manteniendo constante la tensión en sus bornes y la carga mecánica en el eje, estas curvas se denominan curvas en V . Las líneas de trazo corresponden a factores de potencia constantes, y no son más que las curvas características de regulación que muestran cómo ha de variar la corriente de excitación al variar la carga para mantener constante el factor de potencia, Los puntos situados a la derecha de la curva de factor de potencia unidad corresponden a funcionamiento con sobrexcitación y corriente de entra adelantada, mientras que los situados a la izquierda corresponden a funcionamiento subexcitado y corriente de entrada retrasada. Figura 3.11: Curvas V de un motor sincrónico
- 29. 3.6.1 EFECTOS DE POLOS SALIENTES, INTRODUCCIÓN A LA TEORÍA DE LAS DOS REACCIONES Cuando analizamos Máquinas Sincrónicas con rotor cilíndrico teníamos que la f.m.m producida no dependía de la posición espacial que tuviese la onda con respecto al campo inductor, es decir, teníamos una reluctancia constante en todo momento, en cambio cuando trabajamos con máquinas sincrónicas con polos salientes la reluctancia equivalente del circuito magnético varía, la reluctancia es apreciablemente menor en el sentido del eje polar ó eje directo y será mayor en el eje del espacio entre polos ó eje de cuadratura, tal como lo indica la figura 4.2. Javier I. Valenzuela Cruzat Figura 3.12: Ejes de una MS con polos salientes ⃗ Del diagrama 퐸fasorial presente en la figura 3.12 podemos apreciar que la corriente de armadura tiene dos componentes, una en el eje directo y otra en el eje de cuadratura, vemos que la componente de eje de cuadratura se encuentra en fase con la tensión inducida . 3.6.2 DIAGRAMAS FASORIALES PARA MÁQUINAS SINCRÓNICAS CON POLOS SALIENTES. Antes de trazar diagramas fasoriales para representar la MS de polos salientes, es necesario tener en cuenta los conceptos de sobrexcitación y subexcitación, independiente si la máquina este operando como generador ó como motor cuando este sobrexcitada, esta estará entregando reactivos a la red, es por esto que podemos utilizar una máquina sincrónica como un condensador sincrónico, y si la máquina esta subexcitada, entonces está estará consumiendo reactivos. A continuación se presentan los diagramas fasoriales para las distintas configuraciones existentes.
- 30. Javier I. Valenzuela Cruzat Ef Vt jXqIq RaIa jXdId Ia Iq Id a) Subexcitado Ef Vt jXdId RaIa jXqIq Ia Iq Id b) Sobrexcitado Figura 3.13: Diagrama Fasorial MS polos salientes utilizada como motor a) Subexcitada b) Sobrexcitada De la figura anterior es necesario comentar que cuando tenemos la MS en configuración motor siempre tendremos adelantada la tensión 푉푡 (Tensión en los terminales) por sobre la tensión 퐸푓 (Tensión inducida). Cuando el motor esta sobrexcitado tenemos que 퐸푓 > 푉푡 y al contrario cuando esta subexcitado se tiene que 퐸푓 < 푉푡 . Se tiene también que cuando el motor esta sobrexcitado estará operando con un factor de potencia en adelanto y cuando se encuentra subexcitado estará operando con un factor de potencia en atraso. Ef Vt RaIa Iq Ia jXqIq jXdId a) Sobrexcitado Ef Vt Ia Id Iq RaIa jXdId jXqIq b) Subexcitado Figura 3.14: Diagrama Fasorial MS polos salientes utilizada como generador a) Sobrexcitada b) Subexcitada De la figura 4.4 podemos comentar que siempre tendremos adelantada la tensión 퐸푓 por sobre la tensión 푉푡 , luego para cuando la máquina este operando sobrexcitada, está estará entregando reactivos, luego estará trabajando con un factor de potencia inductivo y tendremos que 퐸푓 > 푉푡 , por otra parte si la máquina opera subexcitada, está estará consumiendo reactivos, por lo tanto estará operando con un factor de potencia capacitivo y tendremos que 퐸푓 < 푉푡 .
- 31. 3.6.3 REACTANCIA DE EJE DIRECTO Y CUADRATURA En una máquina sincrónica tenemos que la f.m.m presente se puede dividir en dos, una componente 퐹푎푑 producida por la corriente de armadura de eje directo y una componente 퐹푎푞 producida por la corriente de armadura de eje en cuadratura, luego si la consideramos que actúan sobre ejes de reluctancias permanentes entonces es posible determinar las reactancias de eje directo y eje de cuadratura. Javier I. Valenzuela Cruzat 푋푎푑 : Reactancia eje-d considera flujo producido por 퐼푎푑. 푋푎푞 : Reactancia eje-q considera flujo producido por 퐼푎푞 . Siempre tendremos que 푋푎푑 > 푋푎푞, generalmente se tiene que 푋푎푞 es del orden de 0.5 a 0.8 de 푋푎푑. Si consideramos la inductancia de fuga, se tiene que: 푋푑 = 푋푎푑 + 푋푙 푋푞 = 푋푎푞 + 푋푙 3.6.4. DETERMINACIÓN DE REACTANCIAS Para determinar las reactancias de eje directo y en cuadratura, es necesario realizar la prueba de bajo deslizamiento, esta prueba se realiza llevando el eje a un velocidad cercana a la velocidad de sincronismo, luego se energiza la armadura con una tensión reducida y se toma lectura de las corrientes de armadura, tal como indica la figura 3.15 apuntando los valores máximos y mínimos de la corriente de armadura, para esto se debe tener un oscilograma como el presentado en la figura 3.16. Figura 3.15: Circuito para realizar la prueba de bajo deslizamiento
- 32. Javier I. Valenzuela Cruzat Figura 3.16: Oscilograma Apuntando los valores máximo y mínimos de la corriente de armadura y teniendo en cuenta la tensión aplicada a los bornes de la máquina es posible determinar los valores para las reactancias de eje-d y eje-q tal como indican las ecuaciones siguientes. 푋푑 = 푉퐿 √2 √3퐼푚푖푛 (3-8) 푋푞 = 푉퐿 √2 √3퐼푚푎 푥 (3-9) 3.6.5 POTENCIA EN MÁQUINA SINCRÓNICA DE POLOS SALIENTES La potencia de una MS será siempre 푆 = 푉푡 퐼푎 ∗ , si consideramos a la máquina como un generador sobrexcitado se tiene el siguiente diagrama fasorial, como el presentado en la figura 3.17. Donde se tiene que 푉푡 = |푉푡 | < 훿 y tendremos que 퐼푎 = 퐼푞 − 푗퐼푑. Figura 3.17: Diagrama fasorial de generador sincrónico sobrexcitado Luego la potencia compleja tendrá la siguiente expresión 푆 = (|푉푡 | < 훿) ∙ (퐼푞 + 푗퐼푑 ) si consideramos que 퐼푑 = 퐸푓 −푉푡푐표푠훿 푋푑 y 퐼푞 = 푉푡 푠푖푛훿 푋푞 , reemplazando el valor de las corrientes en la ecuación de la potencia compleja tenemos una expresión para la potencia activa y reactiva tal como indican la ecuación siguiente. 푆 = 퐸푓 푉푡 푋푑 푠푖푛훿 + 푉푡 2(푋푑 −푋푞) 푋푑 ∙푋푞 ∙2 푠푖푛2훿 + 푗 퐸푓 푉푡 푋푑 푐표푠훿 − 푉푡 2 {푠푖푛훿2 푋푞 + 푐표푠훿2 푋푑 } (3-10)
- 33. Figura 3.18: Potencia generada por una máquina sincrónica de polos salientes Si observamos la figura 3.18 se aprecia que tenemos dos componentes de potencia, una generada por la acción de rotor cilíndrico, tal como se indica en la figura 3.2 y la otra componente es producida por la acción de los polos salientes, denominada potencia ó torque de reluctancia. 3.7 CONTROL DE FACTOR DE POTENCIA Ya sea como generador o como motor la potencia en una máquina sincrónica está dada por las ecuaciones siguientes: + + Javier I. Valenzuela Cruzat 푃 = 3푉푡 퐼푎 푐표푠휑 (3-8) 푄 = 3푉푡 퐼푎 푠푖푛휑 (3-9) Donde la tensión y corriente corresponden a variables de línea. El ángulo 휑, corresponde al desfase entre la tensión y la corriente de línea. Con la corriente de campo es posible variar este ángulo 휑. Consideremos un motor alimentado por una red infinita, es decir, la tensión 푉푡 , en sus terminales y la frecuencia serán constantes, la red puede suministrar la corriente que el motor demande, aún cuando sea muy elevada, ya que suponemos que la red es un sistema robusto, además como opere la máquina no producirá cambio alguno en la red, debido a que esta es infinita. Concentrémonos en la figura 3.15, en donde tenemos un esquema de un motor sincrónico simplificado y su diagrama fasorial. Ef jXs Vt Ia Ia Ef Vt jXsIa j d Figura 3.19: Motor sincrónico y su diagrama fasorial, operando subexcitado.
- 34. Luego tenemos que la potencia eléctrica suministrada al motor será constante, o bien la carga mecánica será la misma y no variara, luego tenemos que 푃 debe ser constante en la ecuación (3-8), así como la tensión 푉푡 es constante también entonces la magnitud |퐼푎 푐표푠휑| debe ser constante en todo momento, así tenemos que al variar la corriente de campo, ser modificará la corriente de armadura 퐼푎 , esto se produce ya que la tensión 퐸푓 varía según varia la corriente de campo, luego si aumenta la corriente de campo aumentará la tensión 퐸푓 , así tenemos que la corriente 퐼푎 disminuirá, por ende debe disminuir el ángulo 휑, para poder mantener constante |퐼푎 푐표푠휑|. Además del diagrama fasorial es posible determinar la siguiente expresión para la potencia. Javier I. Valenzuela Cruzat 푃 = 3푉푡퐸푓 푋푠 푠푖푛훿 (3-10) De igual forma como se determino anteriormente se tiene que la magnitud |퐸푓 푠푖푛훿| se debe mantener constante en todo momento, por ende si la tensión 퐸푓 aumenta debido a un aumento de la corriente de campo, necesariamente el ángulo 훿 debe disminuir, donde el ángulo mínimo será 0°. Por lo tanto a través de la corriente de campo podemos determinar si el motor sincrónico trabaja sobrexcitado ó bien subexcitado. Como resumen tenemos la tabla 3.1 para diferentes formas de operación de la máquina sincrónica. Operación Actual Operación deseada Acción necesaria Sobrexcitado (푓푝 푐푎푝푎푐푖푡푖푣표) Subexcitado (푓푝 푖푛푑푢푐푡푖푣표) Disminución corriente de campo Subexcitado (푓푝 푖푛푑푢푐푡푖푣표) Sobrexcitado (푓푝 푐푎푝푎푐푖푡푖푣표) Aumento corriente de campo Tabla 3.1: Resumen de operación de MS 3.8 PLANO P-Q El plano P-Q es donde podemos ver las características de la máquina sincrónica operando en sus cuatro condiciones, están se resumen en cuatro cuadrantes, estos son presentados en la figura 3.20. Generador Sobrexcitado P>0, Q>0 Genera corriente en Atraso Generador Subexcitado P>0, Q<0 Genera corriente en Adelanto Motor Sobrexcitado P<0, Q>0 Consume corriente en Adelanto Motor Subexcitado P<0, Q<0 Consume corriente en Atraso P Q II I III IV Figura 3.20: Plano P-Q y sus cuatro cuadrantes Por lo tanto es posible realizarle prueba a la máquina en ensayo de forma tal que podamos operar en los cuatro cuadrantes del plano P-Q. Para este caso consideremos un conjunto Máquina continua-Máquina sincrónica, tal como muestra la figura 3.21.
- 35. PARTIDOR DC Javier I. Valenzuela Cruzat Máquina sincrónica Máquina CC r s t If DC A1 V2 X XX CAMPO DC A AA H HH INTERPOLOS Z ZZ SHUNT REG. A2 A3 V3 MOTOR C.C +L A -L Z 230 V 1 2 A1 B1 C1 MÁQUINA ESTATOR SINCRÓNICA Regulador De campo A B C Switch Trifásico Red eléctrica Sincronoscopio A1 C1 A C Voltaje Frecuencia sw1 Figura 3.21: Esquema y circuito para determinar plano operar en los cuadrantes del plano P-Q Por lo tanto tendremos en ocasiones a la máquina sincrónica operando como motor y en ocasiones como generador, lo mismo ocurre para la máquina C.C. la diferencia, es que existe una carga conecta a los terminales de armadura de la máquina C.C. para que cuando opere como generador, podamos variar la carga, y así poder utilizar a la máquina C.C. como una carga mecánica para la máquina sincrónica. A continuación se describen de qué forma (siguiendo el conjunto mencionado anteriormente) podemos operar en los cuatro cuadrantes. I) Cuadrante I: Acá tenemos el generador sobrexcitado, por lo tanto este estará suministrando potencia activa y reactiva, una vez que la máquina sincrónica este sincrónizada con la red, tenemos que para poder variar la cantidad de potencia activa que suministra, debemos aumentar la velocidad de la máquina motriz que hace rotar al eje de la máquina sincrónica, para este caso tenemos la máquina C.C operando como motor, luego reduciendo la corriente de campo de la máquina C.C logramos aumentar la velocidad, por lo tanto el generador suministrará más potencia activa, para que la potencia activa aumente, debemos aumentar la corriente de campo de la máquina sincrónica, con esto tendremos una mayor tensión inducida 퐸푓 , por lo tanto la diferencia entre 퐸푓 y 푉푡 será mayor, lo que producirá un aumento en la corriente de armadura y por ende un aumento en la potencia reactancia que suministra el alternador, esto porque variando la corriente de campo, logramos variar el factor de potencia. En este caso se tendrá un factor de potencia inductivo, la corriente se armadura se retrasará con respecto a la tensión de armadura, tal como muestra la figura 3.22.
- 36. Figura 3.22: Forma de onda de 푉푡 y 퐼푎 suministrada por el generador sobrexcitado II) Cuadrante II: Tendremos la máquina sincrónica operando como generador subexcitado, por ende suministra potencia activa y consume potencia reactiva, para lograr esta condición, debemos mantener el ángulo de carga constante, luego se reduce la corriente de campo de la máquina sincrónica, de esta forma lograremos que la tensión inducida 퐸푓 sea menor a la tensión 푉푡 , logrando la condición de subexcitación, por lo tanto para que el generador consuma más reactivos, debemos disminuir aún más la corriente de campo. Para este caso tendremos que el alternador suministrará una corriente de armadura en retraso con respecto a la tensión de armadura tal como indica la figura 3.23. Figura 3.23: Forma de onda de 푉푡 y 퐼푎 suministrada por el generador subexcitado Para pasar de generador a motor, es necesario fijar las condiciones de corriente de campo de máquina sincrónica y máquina C.C. de forma tal que la potencia que suministra el generador sea casi nula, para hacer la potencia activa nula variamos la corriente de campo de la máquina C.C. para que la potencia reactiva sea nula hay que variar la corriente de campo de la máquina sincrónica, luego una vez establecida estas condiciones, se conmuta el switch 1 a la posición 2 como indicado en la figura 3.22, de esta forma tendremos la máquina sincrónica como motor y la máquina C.C. operando como generador. III) Cuadrante III: operando como motor subexcitado, la máquina sincrónica estará consumiendo reactivo y potencia activa, por lo tanto estará operando con un factor de potencia inductivo, para que la potencia activa consumida sea mayor, es necesario cargar al generador D.C, para esto es necesario agregar más cargas eléctricas en los terminales de la armadura de la máquina C.C, para variar el consumo de potencia reactiva es necesario disminuir la corriente de campo de esta, con esto tendremos que la diferencia entre 퐸푓 y 푉푡 aumentara. Luego la máquina sincrónica está consumiendo corriente en atraso, tal como indica la figura 3.24. Javier I. Valenzuela Cruzat
- 37. Javier I. Valenzuela Cruzat Figura 3.24: Forma de onda de 푉푡 y 퐼푎 de motor subexcitado IV) Cuadrante IV: Tendremos a la máquina sincrónica operando como motor sobrexcitado, para esto la máquina estará consumiendo potencia activa y suministrando potencia reactiva, para pasar de una operación subexcitada a estar sobrexcitado se debe aumentar la corriente de campo de la máquina sincrónica de este modo tendremos que la tensión 퐸푓 será mayor a la tensión 푉푡 . Para aumentar la potencia activa que consume el motor, se debe cargar el generador D.C. En estas condiciones tendremos que la maquina consumirá una corriente en adelanto, tal como indica la figura 3.25. Figura 3.25: Forma de onda de 푉푡 y 퐼푎 de motor sobrexcitado Cometarios: - Como vemos en los diagramas fasoriales presentes en el apartado 3.6.2 el ángulo entre la tensión 퐸푓 y 푉푡 es el denominado ángulo de carga, cuando operamos como generador el ángulo de carga se puede variar, variando las condiciones de la fuerza motriz que mueve el eje de la máquina sincrónica, en el caso analizado anteriormente, esto se realiza con la corriente de campo de la máquina C.C, al disminuir la corriente de campo de la máquina C.C. la velocidad del eje debería aumentar, pero como estamos trabajando con una máquina sincrónica, la velocidad será constante y será la velocidad sincrónica, viéndolo desde el punto de vista de flujo de potencia, al aumentar la velocidad, la potencia mecánica que suministra la máquina C.C. aumentará, pero como se requiere un potencia puntual para tener la velocidad sincrónica en el eje, el resto de la potencia será la que suministra el generador. Algo similar ocurre cuando la máquina sincrónica opera como motor, al carga la máquina C.C. como generador, se aumentará el torque resistente que produce la máquina C.C. en el eje, esto tenderá a reducir la velocidad
- 38. en el eje, pero como la velocidad debe ser la velocidad sincrónica, entonces la máquina sincrónica demandará más potencia de la red para poder contra-restar este torque resistente producido por la máquina C.C, con esto se aumenta el ángulo de torque. - Para cambiar de condición sobrexcitada a subexcitada se debe variar solo la corriente de campo de la máquina sincrónica, con esto logramos variar la tensión 퐸푓 y podemos producir una diferencia entre 퐸푓 y 푉푡 , esta diferencia es la que me determina si la máquina opera sobrexcitada ó subexcitada. 3.9 CARTA DE OPERACIÓN Como hemos visto anteriormente la máquina sincrónica puede sufrir fallas en las cuales pierde su sincronismo, esto ocurre cuando superamos el ángulo de torque máximo, que ocurre cuando las tensiones 퐸푓 y 푉푡 están en cuadratura (훿 = 90°), en la carta de operación se presentan los puntos en los cuales se asegura que la máquina sincrónica operará establemente, una carta de operación se presenta en la figura 3.26. Javier I. Valenzuela Cruzat Figura 3.26: Carta de operación 4 MOTORES DE INDUCCIÓN 4.1 ASPECTOS CONSTRUCTIVOS En los motor de inducción se cuenta con un bobinado inductor ubicado en el estator de la máquina y un conjunto inducido ubicado en el rotor de la máquina, lo denominamos conjunto ya que este puede ser un rotor bobinado ó bien un rotor jaula de ardilla. Donde la denominación de rotor jaula de ardilla proviene de su forma física, este consiste en unas serie de barras solidas dispuesta de forma tal que en conjunto forman un cilindro, además estas están cortocircuitadas en ambos extremos, en la figura 4.1 se hace referencia a los aspecto constructivos mencionados anteriormente. Figura 4.1: Estator y rotor de un motor jaula de ardilla. En el rotor bobinado, contamos con tres bobinados distribuidos de forma uniforme, por lo general estos están en conexión Y, y están conectados a unos anillos deslizantes ubicados en el eje, estos anillos junto con las escobillas de carbón, son las que realizan el contacto eléctrico entre los bobinados y los conductores exteriores, es decir, si no fuera por este juego anillo-escobillas, no podríamos tener bobinas en el rotor.
- 39. 4.2 PRINCIO DE FUNCIONAMIENTO Al aplicar corrientes BALANCEADAS (idealmente) en el estator, tenemos que se genera un campo magnético resultante denominado 퐵푆, que gira a velocidad de sincronismo, es decir: Javier I. Valenzuela Cruzat 푛푠푖푛 = 120∙푓푒 푃 (4.1) Donde 푓푒 corresponde a la frecuencia del suministro en Hertz y 푃 es el número de polos que tiene la máquina, luego como este campo es giratorio, produce un 푑∅ 푑푡 en el rotor, por lo tanto se inducen tensión que a la vez produce que circulen corriente por el rotor, por lo tanto como primera conclusión tenemos que el rotor bajas girará a velocidad de sincronismo, esto debido a que la tensión inducida se produce por el movimiento relativo que tiene el campo con respecto al rotor, ahora si el rotor girará a velocidad sincrónica entonces el campo estaría estático con respecto al rotor, por ende no abría un cambio de flujo en el tiempo y no se inducirían tensiones en el rotor. Ahora como bien sabemos, si tenemos una corriente circulando bajo la influencia de un campo magnético, se producirá una fuerza eléctrica, que realiza un torque eléctrico, por ende la máquina comenzará a girar, ahora es claro que para que existe un torque tiene que existir una tensión en el rotor y por tanto la velocidad el rotor será cercana a la de sincronismo, pero jamás girará a velocidad sincrónica. La corriente que circula por el rotor crea un campo magnético resultante 퐵푅 que girará a velocidad sincrónica, luego el sistema electromecánico siempre deseará alcanzar el nivel de mínima energía esto es cuando los campos de rotor y estator están alineados, por tanto, mientras exista un ángulo entre ambos campo tendremos siempre un torque medio no nulo, en particular el torque inducido esta dado por la ecuación 4.2 휏푖푛푑 = 푘퐵푅 × 퐵푆 = 푘|퐵푅||퐵푆 |푠푖푛휃 (4.2) Donde 휃 corresponde al ángulo entre ambos campos. Como vimos anteriormente el rotor del motor de inducción no gira a velocidad sincrónica, por esto se introduce la velocidad de deslizamiento, que es la diferencia entre la velocidad sincrónica y la velocidad en condiciones nominales que tiene el rotor. 푛푑푒푠 = 푛푠푖푛 − 푛푚 (4.3) Donde 푛푑푒푠 es la velocidad de deslizamiento, 푛푠푖푛 es la velocidad sincrónica y 푛푚 corresponde a la velocidad del rotor. Con esto podemos definir el concepto de deslizamiento (푠) que corresponde a la velocidad relativa expresada en por unidad o en porcentaje. 푠 = 푛푠푖푛 −푛푚 푛푠푖푛 ∙ 100% (4.4) Como veremos próximamente el circuito equivalente de un motor de inducción es similar al circuito equivalente de un transformador, es más, el funcionamiento de un motor de inducción es el mismo que utiliza un transformador, se basa en la inducción de tensiones y corrientes en el secundario (rotor) de la máquina. La gran diferencia entre el motor de inducción y el transformador es que las tensiones inducidas en el rotor tienen una frecuencia diferente a la frecuencia de la tensión en el estator, por esto recibe el nombre de transformador giratorio. A través del deslizamiento es posible relacionar la frecuencia de las tensiones inducidas en el rotor y la frecuencia de la tensión en el estator, esta relación se presenta en la tabla 4.5. 푓푟 = 푠 ∙ 푓푒 (4.5)
- 40. La única forma de poder acceder a las corrientes inducidas en el rotor, es utilizando una máquina de rotor bobinado, esto es a través de las escobillas presentes en este. 4.3 CIRCUITO EQUIVALENTE DEL MOTOR DE INDUCCIÓN Como habíamos mencionado anteriormente, el circuito equivalente de un motor de inducción es similar al circuito utilizado para representar al transformador. Para poder determinar el circuito equivalente, comencemos primero por el circuito equivalente que representa el transformador, como el presente en la figura 4.2. Figura 4.2: Circuito equivalente para representar motor de inducción. La primera parte del circuito corresponde al estator, donde R1 y X1 son la resistencia e inductancia de dispersión de los bobinados del estator, Rc y Xm corresponden a la resistencia que representa las pérdidas en el fierro y la inductancia que genera el flujo magnético respectivamente. La tensión interna del primario (estator) E1 está relacionado con el voltaje interno del rotor ER por la razón de vueltas entre sus bobinados. Mientras mayor sea el deslizamiento mayor será la tensión inducida en el rotor, es decir, la tensión 푬푹 será mayor. Ahora para poder determinar un circuito en donde tengamos el modelo del estator y del rotor, debemos realizar las siguientes consideraciones. Primero si tenemos el rotor bloqueado y se aplica una tensión en el estor, se inducirá una tensión en el rotor la cual denominaremos 퐸푅푂 , luego podemos determinar la tensión inducida para un deslizamiento cualquiera, como 퐸푅 = 푠 ∙ 퐸푅푂 . Luego al observar la segunda parte del circuito presente en la figura 4.2 es posible determinar que: Javier I. Valenzuela Cruzat 퐼푅 = 퐸푅 푅푅+푗푋푅 (4.6) 퐼푅 = 푠 퐸푅 표 푅푅+푗푠푋푅푂 (4.7) 퐼푅 = 퐸푅 표 푅푅 /푠+ 푗푋푅푂 (4.8) Por lo tanto en un principio el circuito equivalente para el rotor seria el presentado en la figura 4.3.
- 41. Javier I. Valenzuela Cruzat Figura 4.3: Circuito equivalente para el rotor. Es necesario recalcar que la reactancia del rotor se incrementa a medida que el deslizamiento es mayor. Ahora solo falta referencia al estator el circuito del rotor, para esto consideramos la relación de transformación entre bobinados de estator y rotor. Así logramos tener un circuito equivalente como el indicado en la figura 4.4. Figura 4.4: Circuito equivalente por fase para motor de inducción. Donde tenemos que 푅2 = 푎2 푅푅, 푋2 = 푎2푋푅푂 , 퐼2 = 퐼푅 푎 y 퐸2 = 푎퐸푅푂 . 4.4 CARACTERÍSTICAS DE TORQUE Y POTENCIA EN MOTORES DE INDUCCIÓN Para representar de manera sencilla las pérdidas en el motor de inducción se encuentra un esquema en la figura 4.5.
- 42. Figura 4.5: Diagrama de flujo de potencia de un motor de inducción Conocida la tensión por fase del motor de inducción, es posible determinar la corriente 퐼1 tal como lo expresa la ecuación 4.9. Javier I. Valenzuela Cruzat 퐼1 = 푉푇 푅1+푗푋1+푅퐶 ||푗푋푚||(푅2 푠 +푗푋2) (4.9) Obtenido el valor de esta corriente es posible determinar las pérdidas presentes en la máquina, así tenemos que: 푃퐶푈−푆 = 3퐼1 2푅1 (4.10) 푃푓푒 = 3 2 푅퐶 퐸1 (4.11) Siguiente el diagrama de flujo de potencia presente en la figura 4.5 tenemos que la potencia en el entrehierro es 푃퐴퐺 = 푃푖푛 − 푃퐶푈−푆 − 푃푓푒, o bien obteniendo el valor de la corriente 퐼2 tenemos: 2푅2 푠 푃퐴퐺 = 3퐼2 (4.12) 푃퐶푈−푅 = 3퐼2 2 푅2 (4.13) 푃푐표푛푣 = 푃퐴퐺 − 푃퐶푈−푅 = 3퐼2 2푅2 (1−푠 푠 ) (4.14) 푃푐표푛푣 = (1 − 푠)푃퐴퐺 (4.15) Donde 푃푐표푛푣 es la potencia mecánica que genera el motor de inducción, luego para determinar la potencia mecánica de salida, debemos restarle a 푃푐표푛푣 las pérdidas por fricción y las por roce y ventilación. Es posible obtener un circuito equivalente en donde estén representadas por separado la potencia disipada en la resistencia del bobinado del rotor y la potencia mecánica de salida. Se representa 푅푐표푛푣 = 푅2 푠 − 푅2, factorizando se obtiene que 푅푐표푛푣 = 푅2 (1 푠 − 1). Así en la figura 5.5 se encuentra el circuito equivalente en donde se representan las pérdidas en el cobre y la potencia mecánica de salida.
- 43. Javier I. Valenzuela Cruzat Figura 4.5: Circuito equivalente de motor de inducción. 4.5 CARACTERÍSTICA TORQUE-VELOCIDAD DEL MOTOR DE INDUCCIÓN Desde el punto de vista físico, habíamos determinado anteriormente que el torque que ejerce el motor de inducción depende de la magnitud de la corriente que circula por el rotor y del campo magnético al cual está sometido. En la figura 4.6 se observa los campos magnéticos existen para condición de vacío y plena carga. w BR BS Bnet Rotor IR ER w BR BS Bnet IR Rotor ER a) b) d Figura 4.6: Campos magnéticos en condición a) vacío. b) con carga En condición de vacío tenemos que la velocidad relativa del campo magnético del estator con respecto a la velocidad que tiene el rotor es pequeña, es decir, se tiene un bajo deslizamiento, al ser bajo el deslizamiento la tensión inducida en el rotor 퐸푅 será baja, por ende también la corriente que circula por el rotor, por lo tanto el torque que aplica el motor será bajo y solo se utiliza para poder vencer al torque resistente producido por el roce y ventilación. Durante toda la operación del motor tenemos que el campo neto 퐵푛푒푡표 será constante, por ende incluso están en vacío la corriente del estator será elevada, ya que esta produce la mayor parte del campo 퐵푛푒푡표 . La ecuación que determina el torque que genera el motor es la siguiente: 휏푖푛푑 = 푘퐵푅 × 퐵푛푒푡 = 푘퐵푅 퐵푛푒푡 푠푖푛훿 (4.16) Al someter al motor a carga, tenemos que el deslizamiento aumenta, ya que la velocidad relativa del eje con respecto al campo magnético del estator aumenta, de esta forma tendremos un aumento en la tensión 퐸푅 , lo que provoca un aumento en la corriente del rotor y por lo tanto 퐵푅 aumenta, por ende el torque también lo hace. Para poder comprender mejor el comportamiento que tiene las variables que tienen influencia en el torque inducido por el motor de inducción (ecuación 4.16) se analizaran cada uno por separado.
- 44. 1.- 퐵푅 Campo magnético del rotor, directamente proporcional a la corriente del rotor, mientras que éste no esté saturado. 2.- 퐵푛푒푡 Campo magnético neto en el motor es proporcional a 퐸1 por lo tanto es prácticamente constante. A continuación se presentan algunas de las curvas características de un motor de inducción. Javier I. Valenzuela Cruzat Figura 4.7: Curvas de para determinar torque v/s velocidad. Es posible dividir la curva de torque vs deslizamiento en tres regiones características, primero tenemos la región de bajo deslizamiento. En esta región el deslizamiento crece de forma lineal conforme aumenta la carga, la velocidad mecánica del rotor disminuye de igual forma. En esta región la reactancia del rotor es pequeña por ende el factor de potencia del rotor es prácticamente unitario. Y la corriente que circula por el rotor aumenta de forma lineal conforme aumenta el deslizamiento. Todos los motores en régimen estacionario se encuentran operando en esta región. Una segunda región se denomina región de deslizamiento moderado, en esta condición las variables no evolucionan de forma lineal. Y por ultimo tenemos la tercera región, denominada región de deslizamiento alto, acá al aumentar la carga el torque disminuye. En general los motores de inducción pueden alcanzar un máximo entre 200 ó 250 por ciento del valor nominal a plena carga, y en la partida puede tener un torque de 150 por ciento del nominal a plena carga. CARACTERISTICA TORQUE VS VELOCIDAD A continuación se estudia más en detalle la curva de torque vs velocidad de un motor de inducción. En la figura 4.8 tenemos en detalle dos curvas de las cuales podemos determinar conclusiones importantes.
- 45. Javier I. Valenzuela Cruzat Figura 4.8: Característica torque vs velocidad Algunas conclusiones importantes son: 1.- El torque producido por un motor de inducción a velocidad sincrónica es cero. 2.- La curva torque-velocidad es prácticamente lineal entre vacío y plena carga. En este rango, la resistencia del rotor es mucho mayor que su reactancia, y por lo tanto, la corriente del rotor, el campo magnético del rotor y el torque producido crecen linealmente al aumentar el deslizamiento. 3.-Existe un torque máximo que el motor de inducción no puede superar, va entre el orden de 2 a 3 veces el torque nominal a plena carga. 4.- El torque de partida de un motor de inducción es ligeramente superior al torque nominal en plena carga. 5.- Para un deslizamiento dado, el torque del motor varía con el cuadrado del voltaje aplicado. 6.- Si el rotor de un motor de inducción se hace girar a una velocidad superior a la velocidad sincrónica, se invierte la dirección del par desarrollado y la máquina funciona como generador, convirtiendo potencia mecánica en potencia eléctrica. 7.- Si el rotor gira en dirección contraria a la del campo magnético, el torque porducido hará que la máquina se detenga rápidamente y comience luego a girar en dirección contraria. Puesto que para invertir el sentido de rotación del campo magnético basta intercambiar dos de las fases del estator, este hecho se utiliza como una forma de frenado rápido en un motor de inducción, este proceso es denominad intercambio de fase. 4.6 TORQUE MÁXIMO GENERADO POR MOTOR DE INDUCCIÓN Para poder determinar el torque máximo, primero hay que recordar que 휏푖푛푑 = 푃푐표푛푣 /휔푚, por lo tanto el torque será máximo cuando la potencia consumida por la resistencia 푅2/푆 sea máxima. Ahora tomando el equivalente thevenin de la fuente se tiene el siguiente circuito, presentado en la figura 4.9
- 46. Javier I. Valenzuela Cruzat Figura 4.9: Circuito con equivalente de Thevenin Cuando la carga es de ángulo constante el teorema de thevenin nos dice que la máxima potencia suministrada a 푅2/푆, se produce cuando 푅2/푆 es igual al modulo de la impedancia de la fuente de esta forma tenemos que: 푅2 푆 = √푅푇퐻 2 + (푋푇퐻 + 푋2)2 (4.17) Con esta ecuación podemos determinar el deslizamiento al cual ocurre la máxima transferencia de potencia, así tenemos que: 푆푚푎푥 = 푅2 √푅푇퐻 2+(푋푇퐻 +푋2)2 (4.18) Una conclusión importante a considerar es que el deslizamiento al cual ocurre la máxima transferencia de potencia es proporcional al valor de la resistencia del rotor, por lo tanto es posible variar este deslizamiento cambiando el valor óhmico de la resistencia del rotor. Con esto es posible determinar que el valor de torque máximo será el presentado en la ecuación 4.19. 휏푚푎푥 = 3푉푇퐻 2 2휔푠푖푛 [푅푇퐻 + √푅푇퐻 2+(푋푇퐻 +푋2)2] (4.19) Como vemos el torque es proporcional al cuadrado de la tensión aplicada a los terminales del motor e inversamente proporcional al valor de la impedancia y resistencia del rotor. 4.7 METODOS DE ARRANQUE DE MOTORES DE INDUCCIÓN El arranque de un motor de inducción es relativamente sencillo, pero si provoca grandes problemas que no son deseados, como por ejemplo al darle partida directa a la máquina este consume un gran corriente, que va en el orden de 7 a 8 veces la corriente nominal, esta elevada corriente produce un caída de tensión no deseada en el línea. Una opción efectiva para poder reducir la corriente de partida de un motor de inducción es reduciendo al tensión aplicada al momento de puesta en marcha de la máquina, una limitante de este método es el torque que ejerce a la partida la máquina, como sabemos en la región de bajo deslizamiento la corriente varia linealmente con la reducción de la tensión en cambio el torque es proporcional al cuadrado de la tensión aplicada, por lo tanto el nivel de tensión reducida aplicada a la partida depende de la carga que se aplica al motor al momento de la partida.
- 47. 4.7.a) Partida Y-D Este método consiste en reducir la tensión aplicada a los bornes a través de la conexión, en un principio se pone en marcha en motor en conexión Y, de esta forma, la tensión aplicada será 푉푇 = 푉퐿퐿 /√3 por consecuencia se tiene una reducción de la corriente √3 veces menor. 4.7.b) Partida de autotrafo Se conecta el secundario de un autotrafo a los terminales del motor, luego con el autotrafo se consigue reducir la tensión a la partida, luego se cambia el tap hasta llegar a un valor de tensión cercano al nominal. Posteriormente se desconecta el autotrafo y se alimenta de forma directa al motor. 4.7.c) Aumento de resistencia rotorica Para cuando tenemos rotor bobinado, es posible aumentar la resistencia del rotor incorporando resistencia en serie desde los anillos deslizantes, con esto logramos reducir la corriente y aumentar el torque a la partida, luego una vez que el motor alcanza la velocidad nominal, se desconectan las resistencia exteriores desplazando la curva de torque vs deslizamiento para así tener un torque elevada a un velocidad cercana a la sincrónica. 4.8 DETERMINACIÓN DE LOS PARAMETROS DE CIRCUITO EQUIVALENTE DE MOTOR DE INDUCCIÓN Para poder determinar los parámetros del modelo de un motor de inducción es necesario realizar algunas pruebas que son similares a las pruebas realizadas a los transformadores. 4.8.a) Prueba en vacío Con esta prueba podemos determina las pérdidas mecánicas en general, como son las pérdidas rotacionales y las por roce y ventilación, así como también poder determinar la corriente de magnetización. Como sabemos, en vacío el deslizamiento es pequeño, por ende la corriente del rotor será pequeña también, por lo tanto podemos despreciar la potencia que consume la resistencia del rotor, luego la potencia que consume el motor será la potencia absorbida por la resistencia del estator y las pérdidas mecánicas. Javier I. Valenzuela Cruzat 푃푖푛 = 3퐼1 2푅1 + 푃푚푒푐 (4.20) V W1 A A W2 A Alimentación trifásica Vacío Figura 4.10: Circuito para determinar las perdidas rotacionales y en el cobre del estator Además con esta prueba es posible determinar el valor de la inductancia de magnetización, esto despreciando al inductancia de dispersión del estator, tendríamos que: 푋푚 = 푉퐿 2/푄푇푣푎푐í표 (4.21)
- 48. Si determinamos en valor de 푅1 (ensayo con cc) y considerando la potencia que consume el motor en vacío, tendríamos la potencia activa que consume la resistencia 푅퐶 que representa las pérdidas en el hierro, así 푃푟+푣 = 푃푖푛 − 3퐼2 1 푅1, así tenemos que 푅= (푉− 퐼)2/퐶 푇 1푅1푃푟+푣 4.8.b) Prueba con cc para determinar la resistencia del estator La idea de esta prueba es hacer circular una corriente dc por los bobinados del estator, al ser corriente directa, se tiene que no se inducirán tensiones en el rotor y la inductancia se anulan, al ser la frecuencia de la corriente cero, de esta forma la única oposición de la corriente es la resistencia de los devanados del estator. Para realizar la prueba se aplica tensión dc variable a dos de los tres devanados del estator, de esta forma se aumenta la tensión hasta que la corriente que circule por los devanados sea la corriente nominal, luego midiendo la tensión aplicada tenemos que el valor de la resistencia dc será: Javier I. Valenzuela Cruzat 푅1 = 푉푇 2퐼1 (4.22) Pero es necesario recordar que este valor no incluye el efecto skin que ocurre al someter al bobinado a una corriente alterna. Una forma de aproximar este valor es NI PICO IDEA. V A Alimentación dc variable + R1 R1 R1 Figura 4.11: Circuito para determinar resistencia de estator 4.8.c) Prueba de rotor bloqueado. Esta prueba es similar a la prueba de corto circuito que se les realiza a los transformadores, consiste en bloquear de forma mecánica el rotor del motor de inducción, se aplica tensión reducida al estator hasta alcanzar la corriente nominal, luego como la resistencia de los devanados 푅1 y 푅2 son pequeñas en comparación a la impedancia que modela los fenómenos del hierro, tenemos que una buena aproximación es no considerar esta impedancia y suponer que toda la potencia que consume la máquina es absorbida por las resistencias 푅1 y 푅2, de esta forma, se toma lectura de la corriente de línea, tensión entre líneas y de la potencia total que consume la máquina. En la figura 4.12 se dispone de un circuito para poder realizar la prueba de rotor bloqueado. V W1 A A W2 A Alimentación trifásica Rotor bloqueado Figura 4.12: Circuito para realizar prueba de rotor bloqueado
- 49. Luego obtenida la potencia activa que consume la máquina tenemos que 푃푖푛 = √3푉퐿 퐼퐿 푐표푠휑, como sabemos la tensión aplicada y la corriente circulante (퐼퐿 = 퐼퐴 +퐼퐵 +퐼퐶 Javier I. Valenzuela Cruzat 3 ), así 푓푝 = 푐표푠휑 = 푃푖푛 √3푉퐿 퐼퐿 , de esta forma tenemos que la resistencia total por fase será 푅푇 = 푃푖푛 3퐼퐿 2, también tenemos que 푆푇 = √3푉퐿 퐼퐿 , así tenemos que la potencia reactiva que consumen las inductancias será 푄푇 = √푆푇 2 − 푃푖푛 2, ahora bien con este resultado es posible determinar la reactancia total, así 푋푇 = 푄푇 /3퐼퐿 2, estos resultados recién obtenidos corresponden a los valores por fase, así 푅푇 = 푅1 + 푅2 y 푋푇 = 푋1 + 푋2, como anteriormente hemos determinar el valor de la resistencia 푅1, tenemos que 푅2 = 푅푇 − 푅1. Y podemos asumir que 푋1 ≈ 푋2, y así tenemos que 푋1 ≈ 푋2 = 푋푇 /2. Una vez realizadas todas estas pruebas mencionadas, tendríamos un modelo equivalente del motor de inducción, como el indicado en la figura 4.4 4.9 CONROL DE VELOCIDAD EN MOTORES DE INDUCCIÓN 5. MOTOR DE INDUCCIÓN CON ROTOR BOBINADO. Para este caso, el motor de inducción tiene un rotor bobinado, en donde el bobinado puede ser bifásico o trifásico, pero esencialmente debe tener el mismo número de polos que el estator. Los terminales de este bobinado se encuentran conectados con un conjunto anillos deslizantes y escobillas de carbón, a través de las cuales podemos tener acceso a modificar el valor óhmico total de los bobinados del rotor. En la figura 5.1 se encuentra un rotor bobinado. Figura 5.1: Motor inducción rotor bobinado. 5.1 Partida de MI rotor bobinado. La partida de este motor no se puede realizar directamente, teniendo los terminales del rotor cortocircuitado, ya que los niveles de corriente serían altísimos, ya que al momento de cortocircuitar los bobinados del rotor, el motor estaría operando como si fuese un MIJA (motor de inducción rotor tipo jaula de ardilla). Para disminuir la corriente de partida se agrega resistencia al rotor y se van cortocircuitando (reduciendo valor óhmico), conforme la partida se va desarrollando. Esta resistencia extra, modifica la característica Torque-deslizamiento, es decir, la curva característica de Torque-deslizamiento de un MI se desplaza hacia la izquierda, aumentando el valor óhmico, de forma tal de tener torque máximo a la partida del motor y una corriente reducida. Para entender esta dependencia entre la resistencia rotórica y el deslizamiento al cual ocurre el torque máximo primero recordemos el circuito equivalente de un MI, presente en la figura