Conexiones en-serie-microcontroladores
•
0 recomendaciones•506 vistas

Este documento describe diferentes protocolos de comunicación serial entre microcontroladores, incluyendo SPI, I2C y RS-232. SPI es un protocolo síncrono que utiliza 3 cables y un maestro genera la señal de reloj. I2C es también síncrono y permite más de un maestro utilizando dos líneas (SCL, SDA) y un cable de tierra. RS-232 es asíncrono y requiere un convertidor como MAX232 para equilibrar los niveles de voltaje entre dispositivos.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Conexiones en-serie-microcontroladores
Similar a Conexiones en-serie-microcontroladores (20)
Último
Último (20)
Conexiones en-serie-microcontroladores
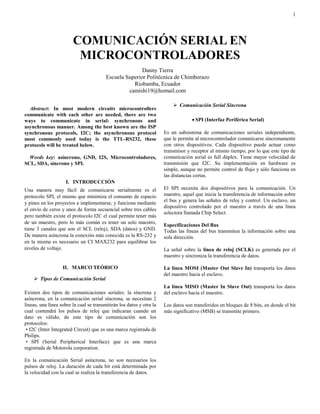
- 1. 1 Abstract: In most modern circuits microcontrollers communicate with each other are needed, there are two ways to communicate in serial: synchronous and asynchronous manner. Among the best known are the ISP synchronous protocols, I2C; the asynchronous protocol most commonly used today is the TTL-RS232, these protocols will be treated below. Words key: asíncrono, GND, I2S, Microcontroladores, SCL, SDA, síncrono y SPI. I. INTRODUCCIÓN Una manera muy fácil de comunicarse serialmente es el protocolo SPI, el mismo que minimiza el consumo de espacio y pines en los proyectos a implementarse, y funciona mediante el envío de ceros y unos de forma secuencial sobre tres cables pero también existe el protocolo I2C el cual permite tener más de un maestro, pero lo más común es tener un solo maestro, tiene 3 canales que son el SCL (reloj), SDA (datos) y GND. De manera asíncrona la conexión más conocida es la RS-232 y en la misma es necesario un CI MAX232 para equilibrar los niveles de voltaje. II. MARCO TEÓRICO Tipos de Comunicación Serial Existen dos tipos de comunicaciones seriales: la síncrona y asíncrona, en la comunicación serial síncrona, se necesitan 2 líneas, una línea sobre la cual se transmitirán los datos y otra la cual contendrá los pulsos de reloj que indicaran cuando un dato es válido, de este tipo de comunicación son los protocolos: • I2C (Inter Integrated Circuit) que es una marca registrada de Philips. • SPI (Serial Peripherical Interface) que es una marca registrada de Motorola corporation. En la comunicación Serial asíncrona, no son necesarios los pulsos de reloj. La duración de cada bit está determinada por la velocidad con la cual se realiza la transferencia de datos. Comunicación Serial Síncrona SPI (Interfaz Periférica Serial) Es un subsistema de comunicaciones seriales independiente, que le permite al microcontrolador comunicarse síncronamente con otros dispositivos. Cada dispositivo puede actuar como transmisor y receptor al mismo tiempo, por lo que este tipo de comunicación serial es full dúplex. Tiene mayor velocidad de transmisión que I2C. Su implementación en hardware es simple, aunque no permite control de flujo y sólo funciona en las distancias cortas. El SPI necesita dos dispositivos para la comunicación. Un maestro, aquel que inicia la transferencia de información sobre el bus y genera las señales de reloj y control. Un esclavo, un dispositivo controlado por el maestro a través de una línea selectora llamada Chip Select. Especificaciones Del Bus Todas las líneas del bus transmiten la información sobre una sola dirección. La señal sobre la línea de reloj (SCLK) es generada por el maestro y sincroniza la transferencia de datos. La línea MOSI (Master Out Slave In) transporta los datos del maestro hacia el esclavo. La línea MISO (Master In Slave Out) transporta los datos del esclavo hacia el maestro. Los datos son transferidos en bloques de 8 bits, en donde el bit más significativo (MSB) se transmite primero. COMUNICACIÓN SERIAL EN MICROCONTROLADORES Danny Tierra Escuela Superior Politécnica de Chimborazo Riobamba, Ecuador camishi19@homail.com
- 2. 2 Ilustración 1 Esquema SPI maestro-esclavo I2C (Inter Integrated Circuit) I2C es un estándar que facilita la comunicación entre microcontroladores, memorias y otros dispositivos con cierto nivel de "inteligencia", sólo requiere de dos líneas de señal y un común. Permite el intercambio de información entre muchos dispositivos a una velocidad aceptable, de unos 100 Kbits por segundo, una de las señales del bus marca el tiempo (pulsos de reloj) y la otra se utiliza para intercambiar datos. Descripción de las señales SCL (System Clock) es la línea de los pulsos de reloj que sincronizan el sistema. SDA (System Data) es la línea por la que se mueven los datos entre los dispositivos. GND (Masa) común de la interconexión entre todos los dispositivos "enganchados" al bus. La comunicación en más detalle Cuando el dispositivo maestro quiere comunicarse con un esclavo, produce una secuencia de inicio en el bus. La secuencia de inicio y son las dos secuencias especiales que se han definido en el bus I2C; estas secuencias son los dos únicos casos en que se permite que la línea de datos (SDA) cambie cuando la línea de reloj (SCL) está alta. Cuando se están transmitiendo datos, la línea SDA debe permanecer estable, y jamás cambiar, mientras la línea SCL está alta. Las secuencias de inicio y de parada señalan el comienzo y el final de una transacción con los dispositivos esclavos. Los datos se transfieren en secuencias de 8 bits. Estos bits se colocan en la línea SDA comenzando por el bit de más peso. Una vez puesto un bit en SDA, se lleva la línea SCL a alto. Debemos recordar que el chip no puede llevar la línea a un estado alto, en realidad, lo que hace es "soltarla", y el que la pone en nivel lógico alto es el resistor de polarización. Por cada 8 bits que se transfieren, el dispositivo que recibe el dato envía de regreso un bit de reconocimiento, de modo que en realidad por cada byte de dato se producen 9 pulsos sobre la línea SCL (es decir, 9 pulsos de reloj por cada 8 bits de dato). Si el dispositivo que recibe envía un bit de reconocimiento bajo, indica que ha recibido el dato y que está listo para aceptar otro byte. Si retorna un alto, lo que indica es que no puede recibir más datos y el dispositivo maestro debería terminar la transferencia enviando una secuencia de parada. Ilustración 2Esquema I2C Comunicación Serial Asíncrona TTL-RS232 El puerto serial de las computadoras es conocido como puerto RS-232, la ventaja de este puerto es que todas las computadoras traen al menos un puerto serial, este permite las comunicaciones entre otros dispositivos. La norma RS232 está definida tanto para la transmisión síncrona como asíncrona; para una comunicación full duplex desde la UART de un microcontrolador deben conectarse un mínimo número de señales, concretamente TXD y RXD así como la masa (GND). Sin embargo una interfaz típica RS232 requiere al menos 7 señales. Ilustración 3 Interfaz TTL-RS232
- 3. 3 Para convertir TTL a RS232 se usa el CI MAX232 que es un conversor de nivel TTL/RS232. Sólo es necesario este CI y 4 condensadores. El MAX232 Este CI soluciona los problemas de niveles de voltaje cuando se requiere enviar unas señales digitales sobre una línea RS- 232. Este chip se utiliza en aquellas aplicaciones donde no se dispone de fuentes dobles de +12 y –12 Volts. El MAX 232 internamente convierte el voltaje de +5V al de doble polaridad de +12V y –12V. Elementos necesarios para una comunicación serie asíncrona entre dos dispositivos. Hardware. Los dispositivos deben tener una tierra en común, las tierras de los circuitos de los dos dispositivos deben estar conectadas. Un cable de conexión de la salida del puerto emisor a la entrada del puerto receptor. Si se quiere comunicación en los dos sentidos, otro cable de conexión del puerto que envía del receptor al receptor del transmisor. Los niveles de los voltajes del transmisor deben ser aceptables por el receptor. Software. El baud rate debe ser el mismo en los dos equipos. (Velocidad de envío y recepción de datos). El número de stop bits, data bits y paridad deben ser iguales. Cualquier protocolo de "Handshaking" necesario debe ser habilitado o deshabilitado. Hardware Handshaking. Si alguno de los dispositivos que se está utilizando está configurado para comunicarse con Hardware Handshaking no pasará nada hasta que se activen las líneas correspondientes y necesarias para empezar el procedimiento. III. CONCLUSIONES La comunicación de datos del bus I2C es lenta en comparación con el bus ISP. En una conexión asíncrona el transmisor y el receptor deberán tener los mismos parámetros de velocidad, paridad, número de bits del dato transmitido y de BIT de parada. La USART es la parte física que se encarga de comunicar el microcontrolador con la PC. IV. RECOMENDACIONES Se debe tener en cuenta que al usar la transmisión RS-232 solo se usan un conjunto de los 25 terminales que tiene el conector y no todos. Al usar la comunicación asíncrona en microcontroladores se debe tener en cuenta que se debe conectar el TX(emisor) con RX(receptor). Tener cuidado al interpretar la información en un bus TTL- RS232 ya que en el mismo se envía primero el bit de menor peso. V. WEBGRAFÍA [1] http://www.monografias.com/trabajos104/banco-pruebas- comunicaciones-seriales-spi/banco-pruebas-comunicaciones-seriales- spi.shtml. [2] https://galaxi0.wordpress.com/el-puerto-serial/. [3] http://www.i-micro.com/pdf/articulos/rs-232.pdf. [4] http://www.i-micro.com/pdf/articulos/rs-232.pdf. [5] http://www.dtic.upf.edu/~jlozano/interfaces/interfaces6.html. [6] http://www.i-micro.com/pdf/articulos/spi.pdf. [7] http://es.scribd.com/doc/26569687/Comunicacion-Serie-Modulo-SSP- Interface-I2C#scribd [8] http://www.aquihayapuntes.com/indice-practicas-pic-en- c/comunicacion-serie-i2c-entre-pic-y-eeprom-24lc256a.html [9] http://robots-argentina.com.ar/Comunicacion_busI2C.htm [10] https://microcontroladores2utec.files.wordpress.com/2009/11/180909_a rticulo_colaboracion_boletin_fica_omar_otoniel_flores.pdf